1.本实用新型涉及容器清洗技术领域,尤其涉及一种用于带动容器双向移动的横移装置。
背景技术:
2.瓶子容器在装料前,需要对容器内部进行清洗加工,容器通常是通过输送设备输送至后续的机器设备上,再通过清洗机对容器进行清洗。而容器通过输送装置输送至清洗机清洗之前容器的瓶口都是向上的,并通过夹紧翻转设备使容器的瓶口垂直向下,调整容器瓶口的方向后,再通过横移装置将容器输送至清洗机处。现有的横移装置主要是单向横移,工作效率低,且难以保证容器与清洗机上的清洗喷头对应配合。
技术实现要素:
3.本实用新型的目的是提供一种用于带动容器双向移动的横移装置,容器抓料装置一、容器抓料装置二沿同步带横移时,通过轨道槽的形状使滑移模组侧面的轴承沿着内轨道板、外轨道板上下交错横移;连接头之间通过连接连杆活动连接,通过驱动组件使连接连杆带动连接头相互靠近或分离,可根据需要来距调整吸盘之间的距离,使吸盘吸取容器瓶子后与清洗机上的喷头相对应。
4.本实用新型的技术方案是这样实现的:
5.一种用于带动容器双向移动的横移装置,包括框架一及其外部连接的框架二,形成框架结构;所述框架一内侧通过螺栓固定有安装板,所述安装板侧面通过轴承座安装有上下平行布置的转轴一和转轴二,所述安装板两侧固定有伺服电机,伺服电机输出端连接的主动皮带轮通过皮带分别与转轴一、转轴二上的从动皮带轮相连接,所述转轴一、转轴二的两端固定有第一同步轮,所述第一同步轮通过同步带分别与安装在框架一、框架二上的第二同步轮相连接。
6.所述框架一、框架二两侧安装有与同步带传送方向平行布置的导轨,并通过导轨滑动安装有滑块座,所述框架一上的滑块座通过滑移模组安装有容器抓料装置一。
7.所述框架二上的滑块座通过滑移模组安装有容器抓料装置二,所述容器抓料装置一与容器抓料装置二相对布置,所述同步带上设置有与滑块座固定连接的锁紧部件。
8.所述框架一的内侧、框架二的外侧分别固定有内轨道板和外轨道板,所述滑移模组侧面设置有与内轨道板、外轨道板上轨道槽相配合的轴承,容器抓料装置一及容器抓料装置二能沿内轨道板、外轨道板交错上下横移。
9.进一步的,所述容器抓料装置一及容器抓料装置二均包括固定架;
10.所述固定架底部两侧沿其长度方向布置有第一导轨和第二导轨,并通过第一导轨、第二导轨对应安装有若干导轨滑块,所述第一导轨、第二导轨右端导轨滑块的底部通过滑移驱动座相连接,左端固定安装有定位块,所述导轨滑块及定位块的底部通过连接头安装有吸附容器的吸盘。
11.进一步的,所述连接头通过连接连杆连接,所述固定架上设有带动滑移驱动座沿第一导轨、第二导轨滑动的驱动组件,通过连接连杆带动导轨滑块相互靠近或分离来调整吸盘的间距。
12.进一步的,所述连接连杆包括若干转动连接在两个相邻连接头上的连杆组件;
13.所述连杆组件包括转动安装在连接头上的第一连杆,所述第一连杆的自由端通过销轴转动连接有第二连杆,所述第二连杆远离第一连杆的一端与相邻的连接头转动连接。
14.进一步的,位于左端的连杆组件上安装有限位连杆,所述限位连杆的一端与第一连杆连接,另一端通过其上开设的腰型槽与第二连杆上的限位柱限位配合。
15.进一步的,所述驱动组件包括减速电机,所述减速电机通过电机固定板固定在固定架上,所述减速电机的输出端连接有丝杆,所述丝杆远离减速电机的一端与安装在固定架上的轴承座相配合,所述滑移驱动座上设有与丝杆内螺纹配合的丝杆滑台。
16.进一步的,所述内轨道板上开设有的轨道槽呈向上的凸型结构,所述外轨道板上开设的轨道槽呈向下的凹型结构。
17.本实用新型的有益效果是:
18.(1)框架一的内侧、框架二的外侧分别固定有内轨道板和外轨道板,滑移模组侧面设置有与内轨道板、外轨道板相配合的轴承,在容器抓料装置一、容器抓料装置二沿同步带横移时,通过轨道槽的形状使滑移模组侧面的轴承沿着内轨道板、外轨道板上下交错横移,避免出现碰撞,提高清洗的效率。
19.(2)连接头之间通过连接连杆活动连接,通过驱动组件使连接连杆带动连接头相互靠近或分离,在连接连杆完全打开时,则为两个相邻连接头(即两个吸盘)之间的最大距离,可以根据需要实时调整吸盘之间的距离,使吸盘吸取容器瓶子后与清洗机上的喷头相对应。
附图说明
20.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
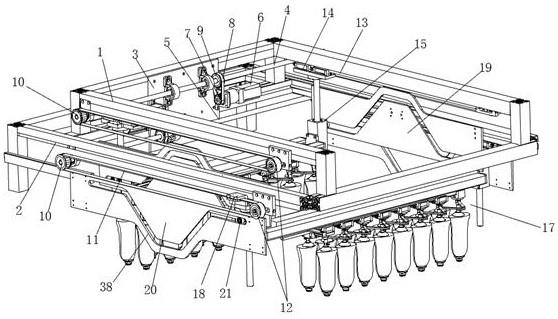
21.图1为一种用于带动容器双向移动的横移装置的示意图;
22.图2为一种用于带动容器双向移动的横移装置的俯视图;
23.图3为一种用于带动容器双向移动的横移装置的仰视图;
24.图4为容器抓料装置一或容器抓料装置二的主视图;
25.图5为容器抓料装置一或容器抓料装置二的仰视图;
26.图6为容器抓料装置一或容器抓料装置二的俯视图;
27.图7为图3中a处的放大图。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的
实施例。
29.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、
ꢀ“
顶”、“底”、“内”、
ꢀ“
外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
30.根据本实用新型的实施例,提供了一种用于带动容器双向移动的横移装置。
31.参照图1-7,根据本实用新型实施例的一种用于带动容器双向移动的横移装置,包括框架一1及其外部连接的框架二2,形成框架结构;所述框架一1内侧通过螺栓固定有安装板3,所述安装板3侧面通过轴承座安装有上下平行布置的转轴一4和转轴二5,所述安装板3两侧固定有伺服电机6,伺服电机6输出端连接的主动皮带轮7通过皮带8分别与转轴一4、转轴二5上的从动皮带轮9相连接,所述转轴一4、转轴二5的两端固定有第一同步轮10,所述第一同步轮10通过同步带11分别与安装在框架一1、框架二2上的第二同步轮12相连接。
32.所述框架一1、框架二2两侧安装有与同步带11传送方向平行布置的导轨13,并通过导轨13滑动安装有滑块座14,所述框架一1上的滑块座14通过滑移模组15安装有容器抓料装置一16。
33.所述框架二2上的滑块座14通过滑移模组15安装有容器抓料装置二17,所述容器抓料装置一16与容器抓料装置二17相对布置,所述同步带11上设置有与滑块座14固定连接的锁紧部件18。
34.所述框架一1的内侧、框架二2的外侧分别固定有内轨道板19和外轨道板20,所述滑移模组15侧面设置有与内轨道板19、外轨道板20上轨道槽38相配合的轴承21,容器抓料装置一16及容器抓料装置二17能沿内轨道板19、外轨道板20交错上下横移。
35.通过上述技术方案:如图1-3所示,框架一1及其外部连接的框架二2,形成类似“回”字型铝型材框架结构。在框架一1的内侧面固定有安装板3,并通过安装板3上的轴承座转动安装有转轴一4、转轴二5,转轴一4与转轴二5上下平行布置。转轴一4、转轴二5的两端均延伸至框架一1、框架二2的外侧连接有第一同步轮10,安装板3两侧分别安装有伺服电机6,伺服电机6的输出端安装有主动皮带轮7,并通过皮带8与安装在转轴一4、转轴二5上的从动皮带轮9转动连接,实现伺服电机6带动转轴一4、转轴二5转动,且第一同步轮10通过同步带11分别与安装在框架一1、框架二2上的第二同步轮12相连接,第一同步轮10与第二同步轮12平行布置,形成传动机构。
36.框架一1、框架二2底部两侧安装有与同步带11传送方向平行布置的导轨13,并通过导轨13滑动安装有滑块座14,所述框架一1、框架二2两侧的滑块座14通过滑移模组15安装有容器抓料装置一16、容器抓料装置二17,同步带11上设置有与滑块座14固定连接的锁紧部件18。
37.具体的,伺服电机6在通过皮带8带动转轴一4、转轴二5转动时,第一同步轮10通过同步带11带动第二同步轮12转动,而同步带11通过锁紧部件18与滑块座14固定连接。因此,在同步带11转动时,会通过同步带11带动滑块座14在导轨13上滑动,从而带动容器抓料装置一16、容器抓料装置二17沿同步带11横移。
38.另外,框架一1的内侧、框架二2的外侧分别固定有内轨道板19和外轨道板20,滑移模组15侧面设置有与内轨道板19、外轨道板20相配合的轴承21,在容器抓料装置一16、容器
抓料装置二17沿同步带11移动时,通过滑移模组15侧面的轴承21沿着内轨道板19、外轨道板20上的轨道槽38移动,实现上下交错横移。且将容器抓料装置一16、容器抓料装置二17上的容器瓶子交错送至清洗机的清洗喷头处进行清洗,提高清洗的效率。
39.进一步的,所述容器抓料装置一16及容器抓料装置二17均包括固定架22;
40.所述固定架22底部两侧沿其长度方向布置有第一导轨23和第二导轨24,并通过第一导轨23、第二导轨24对应安装有若干导轨滑块25,所述第一导轨23、第二导轨24右端导轨滑块25的底部通过滑移驱动座26相连接,左端固定安装有定位块27,所述导轨滑块25及定位块27的底部通过连接头28安装有吸附容器的吸盘29。
41.通过上述技术方案:固定架22底部通过螺丝锁附有第一导轨23、第二导轨24,并通过第一导轨23、第二导轨24对应安装有若干导轨滑块25,导轨滑块25及定位块27的底部通过连接头28安装有吸附容器的吸盘29,吸盘29上设有与连接头28内螺纹配合的吸盘管,通过吸盘29对容器进行吸取或释放。
42.进一步的,所述连接头28通过连接连杆30连接,所述固定架22上设有带动滑移驱动座26沿第一导轨23、第二导轨24滑动的驱动组件,通过连接连杆30带动导轨滑块25相互靠近或分离来调整吸盘29的间距。
43.通过上述技术方案:连接头28之间通过连接连杆30活动连接,且固定架22上设有驱动滑移驱动座26沿第一导轨23、第二导轨24滑动的驱动组件。通过驱动组件使连接连杆30带动连接头28相互靠近或分离,在连接连杆30完全打开时,则为两个相邻连接头28(即两个吸盘29)之间的最大距离,用于距调整吸盘29之间的距离,使吸盘29吸取容器瓶子后与清洗机上的喷头相对应。
44.进一步的,所述连接连杆30包括若干转动连接在两个相邻连接头28上的连杆组件;
45.所述连杆组件包括转动安装在连接头28上的第一连杆301,所述第一连杆301的自由端通过销轴转动连接有第二连杆302,所述第二连杆302远离第一连杆301的一端与相邻的连接头28转动连接。
46.通过上述技术方案:在驱动组件的作用下,驱动滑移驱动座26沿第一导轨23、第二导轨24滑动,拉动第一连杆301,并通过第一连杆301拉动第二连杆302,实现各个吸盘29之间相对伸缩,从而依次调整吸盘29之间的间距,保证在通过吸盘29吸取容器瓶子时,保证每个容器瓶子之间的距离相等,并与清洗机上的喷头对应。
47.进一步的,位于左端的连杆组件上安装有限位连杆31,所述限位连杆31的一端与第一连杆301连接,另一端通过其上开设的腰型槽32与第二连杆302上的限位柱33限位配合。
48.通过上述技术方案:在连杆组件被拉动的时候,可以通过腰型槽32与限位柱33相配合,确定第一连杆301与第二连杆302之间拉动的最大夹角,即两个相邻吸盘29之间的最大间距。
49.进一步的,所述驱动组件包括减速电机34,所述减速电机34通过电机固定板35固定在固定架22上,所述减速电机34的输出端连接有丝杆36,所述丝杆36远离减速电机34的一端与安装在固定架22上的轴承座相配合,所述滑移驱动座26上设有与丝杆36内螺纹配合的丝杆滑台37。
50.通过上述技术方案:通过减速电机34带动其输出端连接的丝杆36转动,并通过丝杆36与固定在滑移驱动座26上的丝杆滑台37内螺纹配合,从而带动滑移驱动座26沿第一导轨23、第二导轨24滑动,来驱动连接连杆30的伸缩,进而调整吸盘29之间的间距,调节方便、快捷。
51.具体实施时,通过电磁阀配合真空阀,将正压气源转为负压气源,传到吸盘29处,吸住容器瓶子,电磁阀可以控制正压气源的通断。与吸盘29连接的吸盘管上设置有与导气管相连接的气嘴。
52.进一步的,所述内轨道板19上开设有的轨道槽38呈向上的凸型结构,所述外轨道板20上开设的轨道槽38呈向下的凹型结构。
53.通过上述技术方案:在容器抓料装置一16、容器抓料装置二17沿同步带11移动时,通过轨道槽38的形状使滑移模组15侧面的轴承21沿着内轨道板19、外轨道板20的轨道槽38交错上下横移,避免出现碰撞。
54.如图4所示,具体实施时,通过电磁阀配合真空阀,将正压气源转为负压气源,传到吸盘29处,吸住容器瓶子,电磁阀可以控制正压气源的通断。与吸盘29连接的吸盘管上设置有与导气管相连接的气嘴。
55.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。