1.本发明涉及一种上下坡车载激光雷达调节系统及其方法。
背景技术:
2.目前,随着智能汽车的不断普及,越来越多的汽车搭载了智能辅助驾驶系统,可实现车辆在高速及部分城市路段的点到点的自动驾驶。通常,这些具有智能辅助驾驶功能的车辆都搭载前视激光雷达来感知车辆前方的道路情况,并根据实时道路情况来控制车辆的行驶。
3.然而,由于现在的激光雷达都固定在车辆前格栅或者车顶前部且不可调节,当遇到坡度较陡的路况则存在一定的视野盲区,如高架桥梁、地下车库的出入口等。当运行在自动驾驶模式下的车辆存在视野盲区将变得十分危险的,极易容易造成交通事故,危害人民的生命和财产安全。
技术实现要素:
4.本发明所要解决的技术问题是,克服现有技术的不足,提供一种上下坡车载激光雷达调节系统及其方法,在车辆驶入上坡和下坡路段时,自适应调节激光雷达的照射角度以获取最大的有效视野,减少了因道路情况变化带来的视野盲区。
5.为了解决上述技术问题,本发明的技术方案是:
6.本发明一方面提供一种上下坡车载激光雷达调节系统,它包括激光雷达、控制器和电机;
7.所述激光雷达通过以太网与控制器相连,所述激光雷达用于识别车辆前方路面情况,并实时将车辆前方道路的点云数据传送给控制器;
8.所述电机与控制器电性连接,所述控制器通过发送脉冲信号控制电机的运动方向及行程,所述电机用于调节激光雷达的照射角度。
9.进一步,所述控制器包括三轴加速度传感器和mcu模块;
10.所述激光雷达与mcu模块的输入端相连;
11.所述三轴加速度传感器通过spi总线与mcu模块的输入端相连,所述三轴加速度传感器用于识别车身姿态;
12.所述mcu模块的输出端通过电机驱动电路与电机相连。
13.进一步,所述三轴加速度传感器采用的芯片型号为日本村田的sca3300。
14.本发明另一方面提供一种上下坡车载激光雷达调节系统的调节方法,它包括:
15.步骤s1、激光雷达识别车辆前方路面情况,并实时将车辆前方道路的点云数据传送给控制器;
16.步骤s2、控制器实时获取激光雷达传输的点云数据,并将接收到的点云数据送入控制器的点云预处理模块,由点云预处理模块对点云数据进行预处理;
17.步骤s3、点云预处理模块将经过预处理的点云数据发送至控制器的地面分割算法
模块,通过地面分割算法模块对点云数据进行地面分割,得到车辆姿态参数;
18.步骤s4、将经过地面分割得到的车辆姿态参数与三轴加速度传感器的车身姿态真值进行对比,得出激光雷达的调整角度值;
19.步骤s5、控制器根据激光雷达的调整角度值,控制电机转动,调节激光雷达的照射角度。
20.步骤s6、控制器根据实时的车身姿态判断行驶的路况,当车辆行驶在斜坡中或者完全驶离斜坡路段时,控制器控制电机向初始位置返回运动,将激光雷达恢复至初始位置。
21.步骤s7、对激光雷达重新进行水平校准。
22.进一步,所述步骤s2具体包括如下步骤:
23.所述点云预处理模块通过调用pcl点云库中的voxelgrid滤波模块,滤除点云数据中的噪声,然后通过sift3d算法提取云数据的关键点,减少点云的数据量。
24.进一步,所述步骤s3具体包括如下步骤:
25.所述地面分割算法模块采用基于sota方法的pago loam算法;
26.将当前的点云数据投影到距离图像中,然后进行地面分割;
27.基于深度图像的平滑程度提取边缘特征和平面特征;通过使用特征的对应关系获得连续扫描之间的变换矩阵来得出车辆的位置和姿态参数。
28.进一步,所述步骤s4具体包括如下步骤:
29.所述控制器通过spi总线接收三轴加速度传感器输出的x,y,z轴三个方向的加速度g值,通过所述控制器内部运行软件中的角度直接计算模块计算车辆瞬间俯仰角θ
瞬间
,通过所述控制器内部运行软件中的角度过滤模块将颠簸或震动带来的加速度传感器芯片的g值变化进行滤除,然后输出车辆实际俯仰角θg;
30.将车辆实际俯仰角θg与激光雷达计算得出的车辆姿态值中的车辆俯仰角θ
l
进行对比,并输出最终的车辆姿态俯仰角θ
最终
,最终的车辆姿态俯仰角θ
最终
的表达式如下:
[0031][0032]
其中,0.7与0.3为三轴加速度传感器的车身姿态真值的权重;
[0033]
最终的车辆姿态俯仰角θ
最终
即为所述激光雷达的调整角度值。
[0034]
进一步,通过所述控制器内部运行软件中的角度过滤模块将颠簸或震动带来的加速度传感器芯片的g值变化进行滤除,具体包括如下步骤:
[0035]
在单位时间t
p
内,判断车辆瞬间俯仰角θ
瞬间
是否大于预设的俯仰角标定值θ
预设
;
[0036]
若单位时间t
p
内,车辆瞬间俯仰角θ
瞬间
大于预设的俯仰角标定值θ
预设
,则计算出最终的车辆姿态俯仰角θ
最终
;
[0037]
若单位时间t
p
内,车辆的瞬间俯仰角θ
瞬间
小于预设的俯仰角标定值θ
预设
,则将小于俯仰角标定值θ
预设
的瞬间俯仰角θ
瞬间
滤除。
[0038]
进一步,所述步骤s5具体包括如下步骤:
[0039]
所述控制器通过lin总线向电机发送使能信号、电机转动方向信号及连续脉冲信号,通过发送连续的脉冲信号对电机进行连续运行控制,每个脉冲信号控制电机转动一个电机转动角度θ
per-plus
,所述控制器计算得出最终的车辆姿态俯仰角θ
最终
后,通过最终的车辆
姿态俯仰角θ
最终
除以电机转动角度θ
per-plus
,计算得出需要发送的脉冲信号数量。控制器通过内部定时器和中断触发器,记录每个脉冲信号的发送时间t
plus
,以控制器输出相应的脉冲数量,保证激光雷达位置的精准控制。
[0040]
进一步,所述步骤s7具体包括如下步骤:
[0041]
通过调用pcl点云库中ransac的平面检测算法,根据平面一般方程式得到激光雷达坐标系中预设的标准竖直向量为(0,0,1),然后计算得出从当前平面的平面法向量旋转到标准竖直向量的旋转矩阵,再把旋转矩阵应用到点云数据的处理中,计算出偏差值,再对点云数据完成旋转,对基准平面完成校准;
[0042]
所述平面一般方程式的表达式为:
[0043]ax
by cz d=0;
[0044]
其中,a
x
,by,cz为xyz平面的法向量;
[0045]
d为常数项,表示法向量与xyz平面中xyz轴的截距。
[0046]
采用了上述技术方案,本发明通过激光雷达识别前方路面情况,采用三轴加速度传感器对于车辆姿态的感知作为真值,共同判定车辆是否即将驶入上坡或者下坡路段,然后通过三轴加速度传感器和激光雷达的融合结果,在上坡和下坡路段时,可自适应调节激光雷达的照射角度以获取最大的有效视野,减少了因道路情况变化带来的视野盲区,提升了行车的安全性。本发明的系统构造简单,兼容性较好,加速度传感器芯片集成于控制器中,对于车辆后期加装、升级比较友好,兼容性更好。
附图说明
[0047]
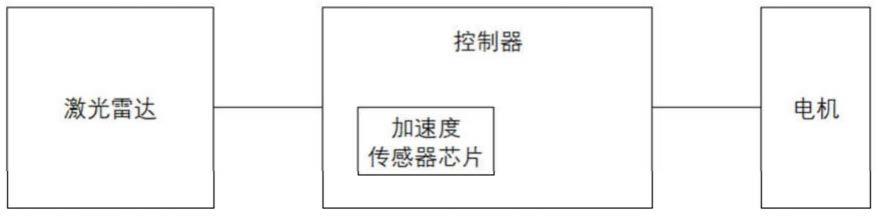
图1为本发明的上下坡的车载激光雷达调节系统的架构图;
[0048]
图2为本发明的车辆上坡的路况示意图;
[0049]
图3为本发明的车辆位于坡上的路况示意图;
[0050]
图4为本发明的车辆下坡的路况示意图;
[0051]
图5为本发明的调节方法的逻辑流程图;
[0052]
图6为本发明的三轴加速度传感器的滤除判定逻辑流程图。
具体实施方式
[0053]
为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明。
[0054]
实施例一
[0055]
如图1所示,本实施例提供一种上下坡车载激光雷达调节系统,它包括激光雷达、控制器和电机。激光雷达通过以太网与控制器相连,激光雷达用于识别车辆前方路面情况,并实时将车辆前方道路的点云数据传送给控制器。电机与控制器电性连接,控制器通过发送脉冲信号控制电机的运动方向及行程,电机用于调节激光雷达的照射角度。
[0056]
具体地,本实施例的控制器包括三轴加速度传感器和mcu模块;
[0057]
激光雷达与mcu模块的输入端相连;
[0058]
三轴加速度传感器通过spi总线与mcu模块的输入端相连,三轴加速度传感器用于识别车身姿态,三轴加速度传感器采用的芯片型号为日本村田的sca3300;
[0059]
mcu模块的输出端通过电机驱动电路与电机相连。
[0060]
本实施例的上下坡车载激光雷达调节系统,通过激光雷达识别前方路面情况,结合三轴加速度传感器对于车辆姿态的感知作为参考“真值”,共同判定车辆是否即将驶入上坡或者下坡路段。进一步,通过加速度传感器和激光雷达的融合结果,适当调节激光雷达的照射角度。当车辆行驶在斜坡路段中、完全驶离斜坡路段后,控制器则会控制电机重新调回至初始位置,同时控制器会对激光雷达的点云数据重新做点云地面水平校准,以确保点云分割分类等处理不受因激光雷达位置变动的影响。当车辆即将上坡或者下坡时,系统会将激光雷达调节一定角度,以保证激光雷达具有最大的有效视野。
[0061]
实施例二
[0062]
如图2~5所示,本实施例提供一种上下坡车载激光雷达调节系统的调节方法,它包括:
[0063]
步骤s1、激光雷达识别车辆前方路面情况,并实时将车辆前方道路的点云数据传送给控制器;
[0064]
步骤s2、控制器实时获取激光雷达传输的点云数据,并将接收到的点云数据送入控制器的点云预处理模块,由点云预处理模块对点云数据进行预处理;
[0065]
步骤s3、点云预处理模块将经过预处理的点云数据发送至控制器的地面分割算法模块,通过地面分割算法模块对点云数据进行地面分割,得到车辆姿态参数;
[0066]
步骤s4、将经过地面分割得到的车辆姿态参数与三轴加速度传感器的车身姿态真值进行对比,得出激光雷达的调整角度值;
[0067]
步骤s5、控制器根据激光雷达的调整角度值,控制电机转动,调节激光雷达的照射角度。
[0068]
步骤s6、控制器根据实时的车身姿态判断行驶的路况,当车辆行驶在斜坡中或者完全驶离斜坡路段时,控制器控制电机向初始位置返回运动,将激光雷达恢复至初始位置。
[0069]
步骤s7、但由于机械误差的存在,需要对激光雷达重新进行水平校准,以避免今后电机多次运动的积累误差和电机返回不到位而造成的后续算法对于点云分割分类等处理的不准确。
[0070]
具体地,本实施例的步骤s2具体包括如下步骤:
[0071]
点云预处理模块通过调用pcl点云库中的voxelgrid滤波模块,滤除点云数据中大量的噪声,即大量的散列点和孤立点。然后通过sift3d算法提取云数据的关键点,以大幅度减少点云的数据量,以减少后续地面分割算法模块的计算量。
[0072]
具体地,本实施例的步骤s3具体包括如下步骤:
[0073]
地面分割算法模块采用基于sota方法的pago loam算法;该方法在性能扰动较小的复杂、不均匀的城市和地面更加不平和崎岖的农村环境中均能较为鲁棒地分割出地面,用于判断车辆前方的道路场景;
[0074]
将当前的点云数据投影到距离图像中,然后进行地面分割;
[0075]
基于深度图像的平滑程度提取边缘特征和平面特征;通过使用特征的对应关系获得连续扫描之间的变换矩阵来得出车辆的位置和姿态参数。
[0076]
具体地,本实施例的步骤s4具体包括如下步骤:
[0077]
在激光雷达与三轴加速度传感器融合方面,以三轴加速度传感器的值为“真值”。
三轴加速度传感器输出x,y,z轴三个方向的加速度g值。关于x,y,z轴的定义:x轴表示水平于地面的横轴方向(车辆左右方向);y轴表示水平于地面的纵轴方向(车辆前后方向);z轴表示垂直于地面的方向(车辆上下方向);
[0078]
控制器通过spi总线接收三轴加速度传感器输出的x,y,z轴三个方向的加速度g值,通过控制器内部运行软件中的角度直接计算模块计算车辆瞬间俯仰角θ
瞬间
,因为车辆在实际行驶过程中,路面不可能做到理想状态下的绝对平整,为了过滤掉细小的颠簸或震动带来的加速度传感器芯片的g值变化,通过控制器内部运行软件中的角度过滤模块将颠簸或震动带来的加速度传感器芯片的g值变化进行滤除,然后输出车辆实际俯仰角θg;
[0079]
将车辆实际俯仰角θg与激光雷达计算得出的车辆姿态值中的车辆俯仰角θ
l
进行对比,并输出最终的车辆姿态俯仰角θ
最终
,最终的车辆姿态俯仰角θ
最终
的表达式如下:
[0080][0081]
其中,0.7与0.3为三轴加速度传感器的车身姿态真值的权重,数值越高表示“真值”可靠度越高;
[0082]
最终的车辆姿态俯仰角θ
最终
即为激光雷达的调整角度值。
[0083]
具体地,如图6所示,通过控制器内部运行软件中的角度过滤模块将颠簸或震动带来的加速度传感器芯片的g值变化进行滤除,具体包括如下步骤:
[0084]
在单位时间t
p
内,判断车辆瞬间俯仰角θ
瞬间
是否大于预设的俯仰角标定值θ
预设
;
[0085]
若单位时间t
p
内,车辆瞬间俯仰角θ
瞬间
大于预设的俯仰角标定值θ
预设
,则计算出最终的车辆姿态俯仰角θ
最终
;
[0086]
若单位时间t
p
内,车辆的瞬间俯仰角θ
瞬间
小于预设的俯仰角标定值θ
预设
,则将小于俯仰角标定值θ
预设
的瞬间俯仰角θ
瞬间
滤除。
[0087]
具体地,本实施例的步骤s5具体包括如下步骤:
[0088]
本实施例通过一个步进电机调节激光雷达的照射角度,控制器通过lin总线向电机发送使能信号、电机转动方向信号及连续脉冲信号,通过发送连续的脉冲信号对电机进行连续运行控制,每个脉冲信号控制电机转动一个电机转动角度θ
per-plus
,控制器计算得出最终的车辆姿态俯仰角θ
最终
后,通过最终的车辆姿态俯仰角θ
最终
除以电机转动角度θ
per-plus
,计算得出需要发送的脉冲信号数量。控制器通过内部定时器和中断触发器,记录每个脉冲信号的发送时间t
plus
,以控制器输出相应的脉冲数量,保证激光雷达位置的精准控制。
[0089]
具体地,本实施例的步骤s7具体包括如下步骤:
[0090]
通过调用pcl点云库中ransac的平面检测算法,根据平面一般方程式得到激光雷达坐标系中预设的标准竖直向量为(0,0,1),然后计算得出从当前平面的平面法向量旋转到标准竖直向量的旋转矩阵,再把旋转矩阵应用到点云数据的处理中,计算出偏差值,再对点云数据完成旋转,对基准平面完成校准;
[0091]
平面一般方程式的表达式为:
[0092]ax
by cz d=0;
[0093]
其中,a
x
,by,cz为xyz平面的法向量;
[0094]
d为常数项,表示法向量与xyz平面中xyz轴的截距。
[0095]
以上所述的具体实施例,对本发明解决的技术问题、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。