技术特征:
1.一种三维数据编码方法,其中,计算预测残差,该预测残差为点群数据中包含的三维点的信息与预测值的差分;生成比特流,该比特流包含表示上述预测残差的第1信息、表示上述第1信息的比特数的第2信息、以及表示上述第2信息的比特数的第3信息。2.如权利要求1所述的三维数据编码方法,其中,上述三维点的上述信息是上述三维点的位置信息;在上述预测残差的计算中,使用表示参照关系的预测树计算上述预测值。3.如权利要求2所述的三维数据编码方法,其中,上述位置信息包含多个成分;在上述预测残差的计算中,按每个成分计算上述预测残差;上述比特流包含每个成分的上述第1信息、上述第2信息以及上述第3信息。4.如权利要求1~3中任一项所述的三维数据编码方法,其中,按包含多个三维点的每个处理单位设置上述第3信息。5.如权利要求1~4中任一项所述的三维数据编码方法,其中,上述第1信息是从由上述第2信息表示的比特数减1而得到的比特数。6.如权利要求1~5中任一项所述的三维数据编码方法,其中,上述比特流还包含表示上述预测残差是否为零的第4信息、以及表示上述预测残差为正还是为负的第5信息;上述第1信息表示从上述预测残差的绝对值减1而得到的值。7.一种三维数据解码方法,其中,从比特流取得表示预测残差的第1信息、表示上述第1信息的比特数的第2信息、以及表示上述第2信息的比特数的第3信息,上述预测残差为点群数据中包含的三维点的信息与预测值的差分;使用上述第1信息、上述第2信息以及上述第3信息,对由上述第1信息表示的上述预测残差加上上述预测值,从而计算上述三维点的上述信息。8.如权利要求7所述的三维数据解码方法,其中,上述三维点的上述信息是上述三维点的位置信息;在上述三维点的上述信息的计算中,使用表示参照关系的预测树计算上述预测值。9.如权利要求8所述的三维数据解码方法,其中,上述位置信息包含多个成分;上述比特流包含每个成分的上述第1信息、上述第2信息以及上述第3信息;在上述三维点的上述信息的计算中,按每个成分,使用上述第1信息、上述第2信息以及上述第3信息计算上述位置信息的成分。10.如权利要求7~9中任一项所述的三维数据解码方法,其中,按包含多个三维点的每个处理单位设置上述第3信息。11.如权利要求7~10中任一项所述的三维数据解码方法,其中,上述第1信息是从由上述第2信息表示的比特数减1而得到的比特数。12.如权利要求7~11中任一项所述的三维数据解码方法,其中,上述比特流还包含表示上述预测残差是否为零的第4信息、以及表示上述预测残差为
正还是为负的第5信息;上述第1信息表示从上述预测残差的绝对值减1而得到的值。13.一种三维数据编码装置,其中,具备:处理器;以及存储器,上述处理器使用上述存储器进行如下处理:计算预测残差,该预测残差为点群数据中包含的三维点的信息与预测值的差分;生成比特流,该比特流包含表示上述预测残差的第1信息、表示上述第1信息的比特数的第2信息、以及表示上述第2信息的比特数的第3信息。14.一种三维数据解码装置,其中,具备:处理器;以及存储器,上述处理器使用上述存储器进行如下处理:从比特流取得表示预测残差的第1信息、表示上述第1信息的比特数的第2信息、以及表示上述第2信息的比特数的第3信息,上述预测残差为点群数据中包含的三维点的信息与预测值的差分;使用上述第1信息、上述第2信息以及上述第3信息,对由上述第1信息表示的上述预测残差加上上述预测值,从而计算上述三维点的上述信息。
技术总结
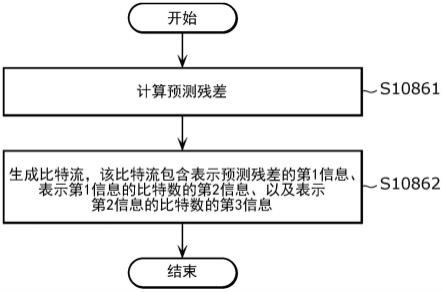
三维数据编码方法计算预测残差,该预测残差为点群数据中包含的三维点的信息与预测值的差分(S10861);生成比特流,该比特流包含表示预测残差的第1信息、表示第1信息的比特数的第2信息、以及表示第2信息的比特数的第3信息(S10862)。例如也可以是,三维点的信息是三维点的位置信息;在预测残差的计算(S10861)中,使用表示参照关系的预测树计算预测值。使用表示参照关系的预测树计算预测值。使用表示参照关系的预测树计算预测值。
技术研发人员:杉尾敏康 井口贺敬
受保护的技术使用者:松下电器(美国)知识产权公司
技术研发日:2021.03.26
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。