技术特征:
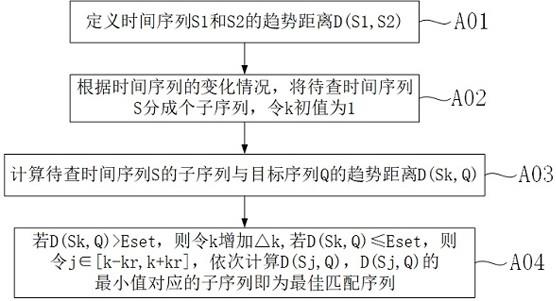
1.一种时间序列趋势相似度搜索方法,其特征在于,包括以下步骤:定义时间序列s1和s2的趋势距离为d(s1,s2),其中,l表示时间序列s2的长度,t
ih
表示时间序列s1的子序列i的长度,n表示时间序列s1和s2包含的点的数量,m
1i
表示时间序列s1的第i个点,m
2i
表示时间序列s2的第i个点,cov()代表了s1和s2两个时间序列点的差异的协方差,dt()表示m
1i
和m
2i
的距离;根据时间序列的变化情况,将待查时间序列s分成m个子序列s
k,k∈[1,m]
,令k等于初值1;计算待查时间序列s的子序列与目标序列q的趋势距离d(s
k
,q);若d(s
k
,q)>e
set
,则令k增加δk,若d(s
k
,q)≤e
set
,则令j∈[k-kr,k kr],kr为预设常数,依次计算d(s
j
,q),d(s
j
,q)中的最小值对应的子序列即为最佳匹配序列s
krj
。2.根据权利要求1所述的一种时间序列趋势相似度搜索方法,其特征在于,根据时间序列的变化情况,将待查时间序列s分成m个子序列s
k,k∈[1,m]
的方法包括:计算目标序列q的方差;将待查时间序列s分成p个片段,p为整数,p>m;将连续的多个片段作为子序列,连续的多个片段的长度与目标序列q长度匹配;计算连续的多个片段的方差,若与目标序列q的方差差别小于预设阈值,则将连续的p个片段作为一个子序列。3.根据权利要求2所述的一种时间序列趋势相似度搜索方法,其特征在于,将目标序列q按照片段长度划分为若干个区间,计算每个区间的平均值;以折线连接区间的平均值,获得折线的转折点数量;计算每个片段的平均值,以折线连接区间的平均值;连续多个片段的折线的转折点数量与目标序列q的折线的转折点数量相差低于预设阈值时,将连续的多个片段作为一个子序列。4.根据权利要求1至3任一项所述的一种时间序列趋势相似度搜索方法,其特征在于,δk的值由下式计算:其中,round()为向下取整函数,||m||表示待查时间序列s的趋势数量。5.根据权利要求4所述的一种时间序列趋势相似度搜索方法,其特征在于,kr的值由下式计算:kr=||m||
·
(d(s
k
,q) e
set
)。6.根据权利要求4所述的一种时间序列趋势相似度搜索方法,其特征在于,待查时间序列s的趋势包括上升趋势、保持趋势及下降趋势。7.一种基于噪声的故障诊断方法,使用如权利要求1至6任一项所述的一种时间序列趋势相似度搜索方法,其特征在于,包括以下步骤:采集故障电机的噪声,形成故障噪声模板,作为目标序列q;
现场采集待检测电机的噪声,作为待查时间序列s;根据待查时间序列s的变化情况,将待查时间序列s分成m个子序列s
k,k∈[1,m]
,令k等于初值1;计算待查时间序列s的子序列与目标序列q的趋势距离d(s
k
,q);若d(s
k
,q)>e
set
,则令k增加δk,若d(s
k
,q)≤e
set
,则令j∈[k-kr,k kr],kr为预设常数,依次计算d(s
j
,q),d(s
j
,q)中的最小值对应的子序列即为最佳匹配序列s
krj
;计算最佳匹配序列s
krj
与目标序列q的趋势距离为d(s
krj
,q),若d(s
krj
,q)小于预设阈值,则判定电机的故障为目标序列q对应的故障,反之,则判定电机无故障。8.根据权利要求7所述的一种基于噪声的故障诊断方法,其特征在于,趋势距离d(s
k
,q)的计算方法为:其中,l表示目标序列q的长度,t
ih
表示时间序列s
k
的子序列i的长度,n表示时间序列s
k
和q包含的点的数量,m
1i
表示时间序列s
k
的第i个点,m
2i
表示时间序列q的第i个点,cov()代表了s
k
和q两个时间序列点的差异的协方差,dt()表示m
1i
和m
2i
的距离。9.一种基于振动的故障诊断方法,使用如权利要求1至6任一项所述的一种时间序列趋势相似度搜索方法,其特征在于,包括以下步骤:采集故障电机的振动,形成故障振动模板,作为目标序列q;现场采集待检测电机的振动,作为待查时间序列s;根据待查时间序列s的变化情况,将待查时间序列s分成m个子序列s
k,k∈[1,m]
,令k等于初值1;计算待查时间序列s的子序列与目标序列q的趋势距离d(s
k
,q);若d(s
k
,q)>e
set
,则令k增加δk,若d(s
k
,q)≤e
set
,则令j∈[k-kr,k kr],kr为预设常数,依次计算d(s
j
,q),d(s
j
,q)中的最小值对应的子序列即为最佳匹配序列s
krj
;计算最佳匹配序列s
krj
与目标序列q的趋势距离为d(s
krj
,q),若d(s
krj
,q)小于预设阈值,则判定电机的故障为目标序列q对应的故障,反之,则判定电机无故障。10.一种基于振动的故障诊断系统,使用如权利要求9所述的一种基于噪声的故障诊断方法,其特征在于,包括声音采集装置、振动检测装置、通信模块、存储模块、显示模块、供电模块和控制器,声音采集装置包括麦克风和采集板,振动检测装置包括三轴振动加速度计和无线通信模块,麦克风通过导线与采集板连接,三轴振动加速度计与无线通信模块通信连接,显示模块安装在壳体上,采集板、无线通信模块、通信模块、存储模块及显示模块均与控制器连接,通信模块与上位机连接,供电模块为其余元器件供电;三轴振动加速度计包括磁吸附座、三轴加速度计、变送器、电池和无线数据传输模块,三轴加速度计安装在磁吸附座上,磁吸附座吸附在待测设备上,变送器与三轴加速度计连接,无线数据传输模块与变送器连接,无线数据传输模块与无线通信模块建立通信连接,电池为三轴加速度计、变送器和无线数据传输模块供电;
存储模块内存储有故障电机的噪声序列q1和振动序列q2,故障诊断系统的工作过程为:控制器收集一段时间内麦克风采集到的噪声信号和振动信号,分别记为噪声序列s1和振动序列s2;将噪声序列s1分成m个子序列s1
k1,k1∈[1,m]
,令k1等于初值1;计算噪声序列s1的子序列与目标序列q1的趋势距离d(s1
k1
,q1);若d(s1
k1
,q1)>e
set
,则令k1增加δk,若d(s1
k1
,q1)≤e
set
,则令j∈[k1-kr1,k1 kr1],kr1为预设常数,依次计算d(s1
j
,q1),d(s1
j
,q1)中的最小值对应的子序列即为最佳匹配序列s1
krj
;计算最佳匹配序列s1
krj
与目标序列q1的趋势距离为d(s1
krj
,q1),若d(s1
krj
,q1)小于预设阈值,则判定电机的故障为目标序列q1对应的故障;将振动序列s2分成m个子序列s2
k2,k2∈[1,m]
,令k2等于初值1;计算噪声序列s2的子序列与目标序列q2的趋势距离d(s2
k2
,q2);若d(s2
k2
,q2)>e
set
,则令k2增加δk,若d(s2
k2
,q2)≤e
set
,则令j∈[k2-kr2,k2 kr2],kr2为预设常数,依次计算d(s2
j
,q2),d(s2
j
,q2)中的最小值对应的子序列即为最佳匹配序列s2
krj
;计算最佳匹配序列s2
krj
与目标序列q2的趋势距离为d(s2
krj
,q2),若d(s2
krj
,q2)小于预设阈值,则判定电机的故障为目标序列q2对应的故障。
技术总结
本发明涉及信息技术领域,具体涉及一种时间序列趋势相似度搜索方法、故障诊断方法及系统,时间序列趋势相似度搜索方法包括以下步骤:定义时间序列S1和S2的趋势距离D(S1,S2);将待查时间序列S分成m个子序列Sk,令k等于初值1;计算待查时间序列S的子序列与目标序列Q的趋势距离D(Sk,Q);若D(Sk,Q)>Eset,则令k增加
技术研发人员:王达 马光飞 钟浩 徐东英 张艳南
受保护的技术使用者:水利部产品质量标准研究所
技术研发日:2022.09.15
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。