1.本发明涉及车位路锥,具体为一种可自动控制的专用车位路锥。
背景技术:
2.很多专用车位为了防止外来车辆占用一般临时性放置路锥或永久性安装车位锁,而车位锁的安装可能受到市政、交通、物业管理等部门的限制,且驾驶员误操作、车位锁偶发性失控都可能造成车辆剐蹭。
3.但放置路锥也有诸多不便,每当自有车辆出入时必须有乘员上下车移动、放置路锥,非常比较麻烦。
技术实现要素:
4.针对上述情况,为克服现有技术的缺陷,本发明提供一种可自动控制的专用车位路锥,有效的解决了车位使用时放置路锥也有诸多不便,每当自有车辆出入时必须有乘员上下车移动、放置路锥,非常比较麻烦的问题。
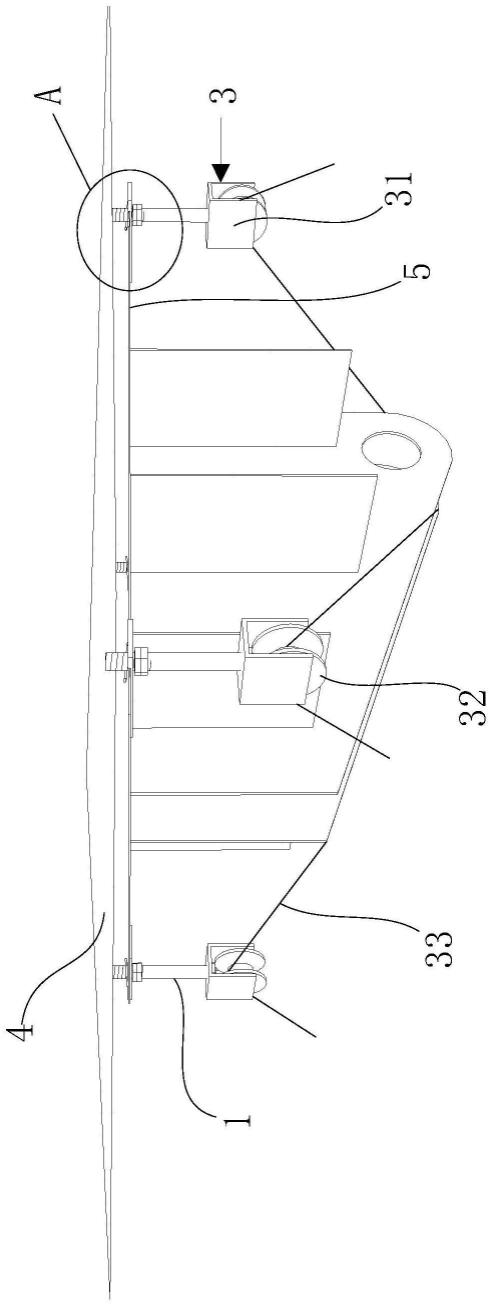
5.为实现上述目的,本发明提供如下技术方案:本发明包括底座、电控万向轮、四棱锥、太阳能电池板、反光条、闪光警灯、万向轮控制组件、配重块、蓄电池、主控制器和通讯模块,所述底座底端靠近四角位置处安装的四个电控万向轮,底座顶端中部安装的四棱锥,四棱锥四个侧面的底部均安装有太阳能电池板,四棱锥的顶端安装有闪光警灯,四棱锥内侧的底部安装有万向轮控制组件,万向轮控制组件的顶端安装有配重块,配重块的顶端安装有蓄电池,蓄电池的上方安装有主控制器,四棱锥上还安装有监测模块,主控制器电性连接外部显示器。
6.根据上述技术方案:所述闪光警灯由摄像头、闪光灯及声光控制组合安装而成。
7.根据上述技术方案:所述主控制器上安装有通讯模块。
8.根据上述技术方案:所述四棱锥四个面的顶部均涂覆有反光条。
9.根据上述技术方案:所述万向轮控制组件包括方向控制和驱动控制。
10.根据上述技术方案:所述监测模块包括雷达测距模块、红外传感器及陀螺仪。
11.有益效果:本发明使用时,无论驾驶员驶入还是驶出均不再需要上下车辆放置或挪开路锥,当驾驶员驶入距离车位5-10m时,本路锥自动识别蓝牙配对车辆,随即启动预设程序按规定路线主动移动至安全位置自行锁定,同时提供必要警示协助驾驶员安全驶入车位,当车辆驶离车位5-10m时,本路锥指示灯闪烁自动返回原位置锁定占据车位,本路锥至少可提供1~10个蓝牙配对,1路主动遥控控制回路操作,即可至少为10辆自用车辆提供自动服务,通过遥控装置灵活为其他车辆服务,本路锥每次唯一确认一组蓝牙配对并相互锁定,最先配对车辆拥有车位使用权,强行闯入者将被永久移除蓝牙配对组。
12.本发明结构新颖,构思巧妙,车位路锥在使用时,当自有车辆出入时无需乘员上下车移动、放置路锥,操作简单方便,有利于使用。
附图说明
13.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:图1是本发明整体三维结构示意图;图2是本发明主视图;图3是本发明内部结构示意图;图4是本发明电路框图;图5是本发明各部件连接图;图6是本发明电路图;图中标号:1、底座;2、竖板;3、调节机构;31、丝杆;32、导向柱;33、手柄;34、轴承;35、移动块;36、丝孔;37、导向孔;38、螺纹孔;4、座椅;5、支柱;6、第一活塞筒;7、第一活塞杆;8、第一活塞;9、脚板;10、紧固带;11、第二活塞筒;12、第二活塞杆;13、第二活塞;14、升降盘;15、定位柱;16、加重盘;17、液压油。
具体实施方式
14.下面结合附图1-6对本发明的具体实施方式做进一步详细说明。
15.实施例一,由图1-6给出,本发明提供一种可自动控制的专用车位路锥,包括底座1、电控万向轮2、四棱锥3、太阳能电池板4、反光条5、闪光警灯6、万向轮控制组件7、配重块8、蓄电池9、主控制器10和通讯模块11,底座1底端靠近四角位置处安装的四个电控万向轮2,底座1顶端中部安装的四棱锥3,四棱锥3四个侧面的底部均安装有太阳能电池板4,四棱锥3的顶端安装有闪光警灯6,四棱锥3内侧的底部安装有万向轮控制组件7,万向轮控制组件7的顶端安装有配重块8,配重块8的顶端安装有蓄电池9,蓄电池9的上方安装有主控制器10,四棱锥3上还安装有监测模块,主控制器10电性连接外部显示器,主控制器10完成全部控制程序,蓄电池9除存储太能能外还可外接220v.ac充电。
16.闪光警灯6由摄像头、闪光灯及声光控制组合安装而成,安装的闪光警灯6警示的同时可通过4g/5g技术与外部传输做辅助监控装置。
17.主控制器10上安装有通讯模块11,用以与外部通讯模块进行配对使用,至少可提供1~10个蓝牙配对,1路主动遥控控制回路操作,即可至少为10辆自用车辆提供自动服务。
18.四棱锥3四个面的顶部均涂覆有反光条5,便于进行反光警示。
19.万向轮控制组件7包括方向控制和驱动控制,便于对电控万向轮2进行转向及驱动的控制。
20.监测模块包括雷达测距模块、红外传感器及陀螺仪,便于在使用时进行主动避障时的检测。
21.四棱锥3采用太阳能为主要能源,为防止连续阴雨(雪)天气锥桶能量不足,辅助以无线充电方式补充电量。
22.太阳能电池板4分别安置于锥桶四面,加大了增加太阳能采集时间,当蓄电池9能量不足时,锥桶则自动(手动)靠近无线充电器补充能源。
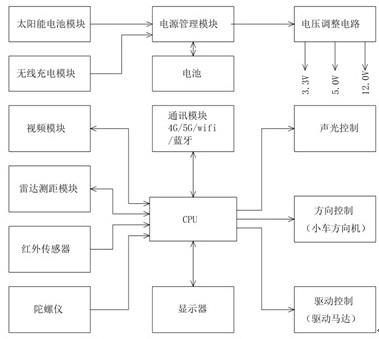
23.电源管理模块负责管理保护电池,防止电池过充等现象的发生。
24.电压调整电路将电池电压转换为各电路应用电压。
25.雷达测距模块作为主传感器负责测量锥桶周围障碍物距离,并将相关信息发生给cpu。
26.4个红外传感器检测4个方向近距离障碍物,将近距离障碍物信息发给cpu,作为障碍物检测的辅助传感器。
27.视频模块主要负责采集图像信息,并将图像信息发送给cpu。
28.陀螺仪作为检测方位角及加速度的传感器,主要用于计算锥桶移动方向及路径。
29.通讯模块以4g/5g/wifi/蓝牙等通讯方式用于车辆、锥桶、手机、遥控器等外围设备互联,专用的app程序还可以将批量锥桶融入物联网实现更广泛的智能控制。
30.显示器模块主要作为人机交互信息设备。
31.主控制器(cpu)是本锥桶的控制核心,接收处理各传感器信息,计算并规划行走路径,控制驱动马达及小车方向机,同时通过简单控制声光控制单元为车辆、路人提供警示,实现本发明的全部要素工作原理:本发明使用时,无论驾驶员驶入还是驶出均不再需要上下车辆放置或挪开路锥,当驾驶员驶入距离车位5-10m时,本路锥自动识别蓝牙配对车辆,随即启动预设程序按规定路线主动移动至安全位置自行锁定,同时提供必要警示协助驾驶员安全驶入车位,当车辆驶离车位5-10m时,本路锥指示灯闪烁自动返回原位置锁定占据车位,本路锥至少可提供1~10个蓝牙配对,1路主动遥控控制回路操作,即可至少为10辆自用车辆提供自动服务,通过遥控装置灵活为其他车辆服务,本路锥每次唯一确认一组蓝牙配对并相互锁定,最先配对车辆拥有车位使用权,强行闯入者将被永久移除蓝牙配对组。
32.有益效果:本发明结构新颖,构思巧妙,车位路锥在使用时,当自有车辆出入时无需乘员上下车移动、放置路锥,操作简单方便,有利于使用。
33.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。