1.本发明涉及微纳机器人,更具体地说是一种可用于核磁靶向造影的微纳机器人。
背景技术:
2.当前,癌症已经成为最难治愈的一大疾病,具有致死率高、发病快、易复发等特点,严重危害人类的健康生活。然而早发现早治疗可提高治愈率、提高预后的准确性,所以癌症早期的诊断是治疗癌症的关键。目前,针对癌症的早期诊断手段有ct检查、核磁共振成像技术(mri)、petct检查等,其中mri是利用外部磁场进行工作的,不具有辐射作用,安全性高,对人体损害小,分辨率高,故已经成为当前受欢迎的一种诊断方法。
3.虽然mri分辨率高,但是对于一些病变组织和正常组织之间弛豫时间较为接近,会导致mri成像不清晰、有伪影,会影响早期诊断准确性。所以可以通过注射造影剂来增加病变区域和正常组织区域的信号差别。目前使用造影剂大多采用静脉注射的方式,为了使成像清晰,往往需要大剂量的造影剂,然而出于安全考虑,造影剂的剂量是受限的。如果能靶向运送造影剂到达病变区域,这样不仅可以降低使用剂量,也能大大增强病变区域的信号,使得成像更清晰。因此,本发明设计了一种可用于核磁靶向造影的微纳机器人,除了可以携带造影剂快速到达指定位置之外,该靶向造影机器人系统还具有多模态驱动模式:超声驱动模式,光催化驱动模式,光热作用,旋转磁场驱动模式,振荡磁场驱动模式。
技术实现要素:
4.本发明的目的是提供一种可用于核磁靶向造影的微纳机器人,该靶向造影机器人具有多模态驱动模式,在外场作用下可以主动运动,快速到达组织病变区域,并且造影剂可以可控释放,进而实现核磁靶向成像,提升成像效果。
5.本发明的目的通过以下技术方案来实现:
6.一种可用于核磁靶向造影的微纳机器人,包括微纳机器人头部和通过微纳机器人头部携带的多个造影剂装载结构,所述微纳机器人在外场的驱动作用下,控制微纳机器人的运动方向和速度,所述造影剂装载结构为能够产生热磁效应的磁性材料,造影剂装载结构内装载有造影剂;
7.所述微纳机器人还设置有微纳机器人尾部;
8.所述微纳机器人尾部覆盖磁性物质;
9.所述磁性物质为镍;
10.所述微纳机器人为刚柔复合结构,微纳机器人头部和微纳机器人尾部为刚性,微纳机器人中间采用柔性的螺旋链条式结构连接多个造影剂装载结构、微纳机器人头部和微纳机器人尾部;
11.所述微纳机器人头部为带有凹端的非对称结构;
12.所述微纳机器人头部的凹端处蒸镀二氧化钛;
13.所述微纳机器人头部覆盖金纳米层;
14.所述外场为超声、光催化、光热和磁场;
15.所述磁性材料为覆盖在造影剂上的四氧化三铁纳米层。
16.本发明一种可用于核磁靶向造影的微纳机器人的有益效果为:
17.微纳机器人具有主动运动能力,能携带造影剂快速到达指定位置;
18.微纳机器人可以在超声、光催化、光热和磁场等多种外场的作用下驱动进行运动;
19.微纳机器人的运动方向可控,在人为操控下对特定区域靶向增强;
20.微纳机器人携带的造影剂可控释放,可在磁热作用下诱导微纳机器人释放造影剂。
附图说明
21.下面结合附图和具体实施方法对本发明做进一步详细的说明。
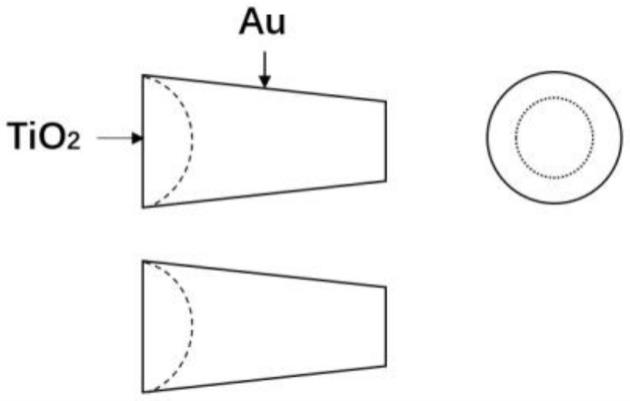
22.图1是本发明的核磁靶向造影的微纳机器人头部结构三视图;
23.图2是本发明的核磁靶向造影的微纳机器人携带多种造影剂过程示意图;
24.图3是本发明的核磁靶向造影的微纳机器人整体结构示意图。
具体实施方式
25.下面结合附图对本发明做进一步详细说明。
26.如图3所示,可用于核磁靶向造影的微纳机器人采用刚柔复合结构,具有刚性的微纳机器人头部和微纳机器人尾部,微纳机器人中间采用柔性的螺旋链条式结构连接多个造影剂装载结构、微纳机器人头部和微纳机器人尾部;
27.如图1所示,下面对如何实现超声驱动进行说明,所述微纳机器人头部为带有凹端的非对称结构,该不对称形状会导致入射的超声波在表面的散射引起的声压不对称分布,凹端处的声波散射将能量集中在曲率附近,其他表面则会削弱曲率附近的能量,从而产生局部诱导压力梯度,产生推动力推动其前进,实现超声驱动模式;
28.如图1所示,下面对如何实现光催化驱动进行说明,所述微纳机器人头部的凹端处蒸镀二氧化钛,在紫外光的照射下,光催化活性金属二氧化钛,产生气泡推动其运动,实现光催化驱动模式;
29.如图1所示,下面对如何实现光热驱动进行说明,所述微纳机器人头部覆盖金纳米层,在外部红外光的作用下,该金纳米层表面会进行光热转化,产生局部高温,形成热梯度来推动微纳机器人快速运动,实现光热作用驱动模式;
30.如图3所示,下面对如何实现磁场驱动进行说明,所述微纳机器人尾部覆盖磁性物质,磁性物质优选为镍,在外源磁场的作用下,微纳机器人尾部和造影剂装载结构会随外界磁场摆动,在磁性结构的波动运动下,带动其他结构进行运动,实现旋转磁场驱动模式和振荡磁场驱动模式;
31.在外加旋转磁场的作用下,微纳机器人尾部会随磁场进行旋转,并带动其它结构发生旋转,柔性的螺旋链条式结构允许微纳机器人发生变形,从而打破空间的对称性实现净位移,进而驱动微纳机器人运动;
32.在外加振荡磁场作用下,微纳机器人尾部受到磁力矩作用进行摆动,微纳机器人尾部的摆动通过柔性的螺旋链条式结构传递给其他部分,最终产生推进力实现微纳机器人
向前运动;
33.如图1至3所示,造影剂装载结构为覆盖在造影剂上的四氧化三铁纳米层,可以在外界磁热作用下四氧化三铁纳米层膨胀,微纳机器人释放造影剂,实现造影剂的可控释放;
34.如图1至3所示,在外场施加不同的作用,可以控制微纳机器人运动方向和速度,使微纳机器人快速移动到病变区域,到达指定位置后,通过外场施加磁场,在高频交变磁场的作用下,四氧化三铁磁性纳米层产生热效应,薄氧化铁壳的边缘区域会出现纳米裂纹,利用磁热作用,诱导微纳机器人释放造影剂,在人为操纵下对特定区域实现了靶向造影增强。
技术特征:
1.一种可用于核磁靶向造影的微纳机器人,包括微纳机器人头部和通过微纳机器人头部携带的多个造影剂装载结构,其特征在于:所述微纳机器人在外场的驱动作用下,控制微纳机器人的运动方向和速度,所述造影剂装载结构为能够产生热磁效应的磁性材料,造影剂装载结构内装载有造影剂。2.根据权利要求1所述的一种可用于核磁靶向造影的微纳机器人,其特征在于:所述微纳机器人还设置有微纳机器人尾部。3.根据权利要求2所述的一种可用于核磁靶向造影的微纳机器人,其特征在于:所述微纳机器人尾部覆盖磁性物质。4.根据权利要求3所述的一种可用于核磁靶向造影的微纳机器人,其特征在于:所述磁性物质为镍。5.根据权利要求2所述的一种可用于核磁靶向造影的微纳机器人,其特征在于:所述微纳机器人为刚柔复合结构,微纳机器人头部和微纳机器人尾部为刚性,微纳机器人中间采用柔性的螺旋链条式结构连接多个造影剂装载结构、微纳机器人头部和微纳机器人尾部。6.根据权利要求1所述的一种可用于核磁靶向造影的微纳机器人,其特征在于:所述微纳机器人头部为带有凹端的非对称结构。7.根据权利要求5所述的一种可用于核磁靶向造影的微纳机器人,其特征在于:所述微纳机器人头部的凹端处蒸镀二氧化钛。8.根据权利要求1所述的一种可用于核磁靶向造影的微纳机器人,其特征在于:所述微纳机器人头部覆盖金纳米层。9.根据权利要求1所述的一种可用于核磁靶向造影的微纳机器人,其特征在于:所述外场为超声、光催化、光热和磁场。10.根据权利要求1所述的一种可用于核磁靶向造影的微纳机器人,其特征在于:所述磁性材料为覆盖在造影剂上的四氧化三铁纳米层。
技术总结
本发明涉及微纳机器人,更具体的说是一种可用于核磁靶向造影的微纳机器人,包括微纳机器人头部和通过微纳机器人头部携带的多个造影剂装载结构,所述微纳机器人在外场的驱动作用下,控制微纳机器人的运动方向和速度,所述造影剂装载结构为能够产生热磁效应的磁性材料,造影剂装载结构内装载有造影剂;该靶向造影机器人具有多模态驱动模式,在外场作用下可以主动运动,快速到达组织病变区域,并且造影剂可以可控释放,进而实现核磁靶向成像,提升成像效果。成像效果。成像效果。
技术研发人员:刘学嘉 李雷珂 王林 李牧 于世民 宋文平 张广玉 李天龙
受保护的技术使用者:哈尔滨工业大学
技术研发日:2022.09.13
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。