一种确定大气vocs特征组分污染源区的方法及系统
技术领域
1.本发明涉及环境空气质量监测技术、计算机技术领域,特别是涉及一种确定大气vocs特征组分污染源区的方法及系统。
背景技术:
2.近年来,随着我国大气污染防治措施的持续推进,国内大气粗细颗粒物浓度整体呈持续下降趋势,近地面o3污染问题却愈发突出,污染超标天数和占比在各大城市群中不断增加,逐渐取代颗粒物成为城市中的首要污染物。o3不仅影响气候变化,而且对农作物、环境和人体健康造成负面影响。
3.vocs(挥发性有机物)作为o3生成的重要前体物,不仅参与大气光化学反应,造成o3及二次气溶胶污染,而且其自身也大多为有毒有害物种。然而现有的技术中多以确定颗粒物污染源为主,还没有关于vocs污染源区确定的技术方案,不能明确o3污染来源。
4.因此,本领域亟需一种能够确定vocs污染源区的技术方案。
技术实现要素:
5.本发明的目的是提供一种确定大气vocs特征组分污染源区的方法及系统,能够实现对区域的vocs特征组分污染来源解析,以解决目前没有关于vocs污染源区确定的技术方案的问题。
6.为实现上述目的,本发明提供了如下方案:
7.一种确定大气vocs特征组分污染源区的方法,所述方法包括:
8.获取目标区域在若干个监测时段内的vocs监测数据;
9.对于每个监测时段:
10.将所述vocs监测数据输入特征组分识别模型,得到vocs中各组分的参数值;
11.根据所述vocs中各组分的参数值选取所述组分作为vocs特征组分;
12.获取所述目标区域中与所述vocs特征组分具有相同监测时段的气象数据;
13.将所有所述监测时段的所述气象数据输入后向轨迹模型,得到后向轨迹数据;
14.将所述后向轨迹数据网格化;
15.将所述vocs特征组分的浓度值超过预设阈值的所述监测时段作为污染监测时段;
16.利用所述污染监测时段的后向轨迹数据根据潜在源贡献因子pscf计算污染来源网格;所述污染来源网格即为大气vocs特征组分污染源区。
17.在一些实施例中,所述利用所述污染监测时段的后向轨迹数据根据潜在源贡献因子pscf计算污染来源网格的计算公式为:其中,pscf
ij
为污染来源网格,n
ij
为经过第(i,j)个网格单元中所有轨迹端点的总数,m
ij
是第(i,j)个网格单元中污染轨迹端点的总数;所述轨迹端点为所述后向轨迹在每个所述监测时段内的端点。
18.在一些实施例中,
19.在所述获取目标区域在若干个监测时段内的vocs监测数据之后,还包括:获取目标区域在若干个监测时段内的o3监测数据;
20.所述将所述vocs特征组分的浓度值超过预设阈值的所述监测时段作为污染监测时段,具体包括:
21.将所述o3监测数据超过预设阈值的监测时段作为o3污染时段;
22.将与所述o3污染时段相同的监测时段作为vocs特征组分的浓度值超过预设阈值的监测时段,即污染监测时段。
23.在一些实施例中,在利用所述污染监测时段的后向轨迹数据根据潜在源贡献因子pscf计算污染来源网格;所述污染来源网格即为大气vocs特征组分污染源区之后,还包括:
24.利用浓度权重轨迹分析模型计算所述污染来源网格中每个网格单元的浓度;计算公式为:其中,c
ij
为第(i,j)个网格单元的加权平均浓度,m为轨迹的总数,c
l
为第l条轨迹经过第(i,j)个网格单元时对应的污染物浓度,τ
ijl
为第l条轨迹在第(i,j)个网格单元停留的时间,w(n
ij
)为第(i,j)个网格单元的修正因子。
25.在一些实施例中,其中,n
ij
为经过第(i,j)个网格单元的所有轨迹端点的总数。
26.在一些实施例中,在确定所述大气vocs特征组分污染源区之后,还包括:
27.将所述污染源区根据不同的浓度,按照颜色区分并显示。
28.在一些实施例中,所述将所述vocs监测数据输入特征组分识别模型,得到vocs中各组分的参数值,具体包括:
29.将所述vocs监测数据输入特征组分识别模型,得到vocs中各组分的参数值;所述参数包括:oh消耗速率和臭氧生成潜势。
30.在一些实施例中,所述特征组分识别模型包括:oh生成速率模块和臭氧生成潜势模块;
31.所述oh生成速率模块的计算公式为:
[0032][0033]
其中,l
ioh
为vocs中第i个组分的oh消耗速率,ci为vocs中第i个组分在大气中的浓度,k
ioh
为vocs中第i个组分与oh的反应速率常数;
[0034]
所述臭氧生成潜势模块的计算公式为:
[0035]
ofpi=miri×
[voc]i[0036]
其中,ofpi为vocs中第i个组分的臭氧生成潜势,miri为vocs中第i个组分在臭氧最大增量反应中的臭氧生成系数,[voc]i为大气中vocs中第i个组分的浓度。
[0037]
在一些实施例中,所述根据所述vocs中各组分的参数值选取所述组分作为vocs特征组分,具体包括:
[0038]
选取oh消耗速率和臭氧生成潜势数值最大的组分,或者选取oh消耗速率和臭氧生成潜势数值均位于前三的组分,作为vocs特征组分。
[0039]
本发明还提供了一种确定大气vocs特征组分污染源区的系统,所述系统包括:
[0040]
数据获取模块,用于获取目标区域在若干个监测时段内的vocs监测数据;
[0041]
数据初级处理模块,用于:
[0042]
对于每个监测时段:
[0043]
将所述vocs监测数据输入特征组分识别模型,得到vocs中各组分的参数值;
[0044]
根据所述vocs中各组分的参数值选取所述组分作为vocs特征组分;
[0045]
获取所述目标区域中与所述vocs特征组分具有相同监测时段的气象数据;
[0046]
后向轨迹数据获取模块,用于将所有所述监测时段的所述气象数据输入后向轨迹模型,得到后向轨迹数据;
[0047]
网格化模块,用于将所述后向轨迹数据网格化;
[0048]
污染时段获取模块,用于将所述vocs特征组分的浓度值超过预设阈值的所述监测时段作为污染监测时段;
[0049]
污染来源计算模块,用于利用所述污染监测时段的后向轨迹数据根据潜在源贡献因子pscf计算污染来源网格;所述污染来源网格即为大气vocs特征组分污染源区。
[0050]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0051]
本发明提供了一种确定大气vocs特征组分污染源区的方法及系统,通过获取目标区域的vocs监测数据,并通过ccrm模型获取vocs特征组分,将相同时段对应的气象数据输入后向轨迹模型,得到后向轨迹数据,再将后向轨迹网格化,最后通过潜在源贡献因子模型确定特征组分的污染源区分布。本发明提供的确定vocs特征组分污染源区的方法及系统,操作简单,能够实现对区域的vocs特征组分污染来源解析,为研究大气污染治理分区(尤其是o3污染)管控提供有力支撑。
附图说明
[0052]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0053]
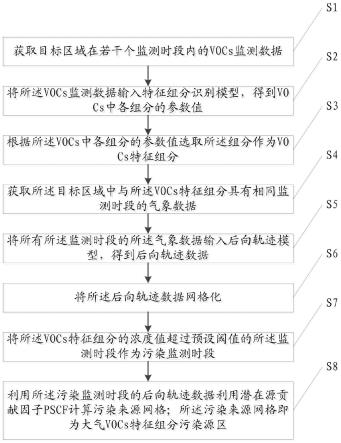
图1为本发明实施例一提供的确定大气vocs特征组分污染源区的方法流程图。
[0054]
图2为本发明实施例一提供的确定大气vocs特征组分污染源区的方法的详细步骤示意图。
[0055]
图3为本发明实施例二提供的确定大气vocs特征组分污染源区的系统的框图。
具体实施方式
[0056]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0057]
vocs(挥发性有机物)作为o3生成的重要前体物,不仅参与大气光化学反应,造成o3及二次气溶胶污染,而且其自身也大多为有毒有害物种;以往专利多以确定颗粒物污染源为主,而关于vocs污染源区确定相对较少,因此分析vocs特征组分的污染源区,对明确o3污染来源,解决城市近地面o3污染问题具有重要意义。
[0058]
本发明的目的是提供一种确定大气vocs特征组分污染源区的方法及系统,能够实现对区域的vocs特征组分污染来源解析,以解决目前没有关于vocs污染源区确定的技术方案的问题。
[0059]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0060]
实施例一:
[0061]
如图1所示,本实施例提供了一种确定大气vocs特征组分污染源区的方法,所述方法包括:
[0062]
s1、获取目标区域在若干个监测时段内的vocs监测数据。同时还获取目标区域在若干个监测时段内的o3监测数据。
[0063]
本实施例中,获取目标点位(大气环境监测超级站)的vocs和o3监测数据,然后根据这些监测数据,确定vocs和o3的监测时段。
[0064]
对于每个监测时段:
[0065]
s2、将所述vocs监测数据输入特征组分识别模型(characteristic component recognition model,简称ccrm模型),得到vocs中各组分的参数值。然后确认各个组分的浓度值。所述参数包括:oh消耗速率和臭氧生成潜势。
[0066]
所述特征组分识别模型包括:oh(羟基自由基)生成速率模块和臭氧生成潜势模块。
[0067]
所述oh生成速率模块的计算公式为:
[0068][0069]
其中,l
ioh
为vocs中第i个组分的oh消耗速率,单位为s-1
;ci为vocs中第i个组分在大气中的浓度,
×
10-9
;k
ioh
为vocs中第i个组分与oh的反应速率常数,s-1
。
[0070]
所述臭氧生成潜势模块的计算公式为:
[0071]
ofpi=miri×
[voc]i[0072]
其中,ofpi为vocs中第i个组分的臭氧生成潜势(μg/m3),miri为vocs中第i个组分在臭氧最大增量反应中的臭氧生成系数(g
·
g-1
),[voc]i为大气中vocs中第i个组分的浓度(μg/m3)。
[0073]
分别将每个监测时段的vocs监测数据输入特征组分识别模型,得到每个监测时段的vocs中各组分的参数值,并确认各个组分的浓度值。
[0074]
s3、根据所述vocs中各组分的参数值选取所述组分作为vocs特征组分。
[0075]
本实施例中,针对每个监测时段来讲,选取oh消耗速率和臭氧生成潜势数值最大的组分,或者选取oh消耗速率和臭氧生成潜势数值均位于前三的组分,作为vocs特征组分。
[0076]
s4、获取所述目标区域中与所述vocs特征组分具有相同监测时段的气象数据。
[0077]
s5、将所有所述监测时段的所述气象数据输入后向轨迹模型,得到后向轨迹数据。
[0078]
后向轨迹数据主要为气团来向数据,即表征气团从哪里来(气团中包含的参数包
括:风速、风向、温度、湿度等)。
[0079]
s6、将所述后向轨迹数据网格化。
[0080]
s7、将所述vocs特征组分的浓度值超过预设阈值的所述监测时段作为污染监测时段。
[0081]
由于现有的vocs没有一个固定的标准,因此,本实施例利用o3的浓度阈值来表征vocs的浓度是否超过阈值,其具体方法包括:
[0082]
将所述o3监测数据超过预设阈值的监测时段作为o3污染时段。
[0083]
将与所述o3污染时段相同的监测时段作为vocs特征组分的浓度值超过预设阈值的监测时段,即污染监测时段。
[0084]
s8、利用所述污染监测时段的后向轨迹数据根据潜在源贡献因子pscf计算污染来源网格;所述污染来源网格即为大气vocs特征组分污染源区。
[0085]
潜在源贡献因子pscf的计算公式为:其中,pscf
ij
为污染来源网格,n
ij
为经过第(i,j)个网格单元中所有轨迹端点的总数,m
ij
是第(i,j)个网格单元中污染轨迹端点的总数;所述轨迹端点为所述后向轨迹在每个所述监测时段内的端点。
[0086]
潜在源贡献因子分析法是以条件概率函数为基本原理识别可能污染源位置的方法。基于后向轨迹模拟的结果,创建一定分辨率的矩形网格(i,j)覆盖研究区域,并对污染物浓度设定阀值。当某轨迹的污染物浓度高于阀值即标记为污染轨迹。将经过网格(i,j)的污染轨迹端点数m
ij
与落在该网格(i,j)内的所有轨迹端点数相比,即得到pscf的结果。其中,污染物浓度是指o3浓度对应的vocs观测值。
[0087]
在得到大气vocs特征组分污染源区之后,还利用浓度权重轨迹分析模型(cwt)计算所述污染网格中每个网格单元的浓度。
[0088]
计算公式为:
[0089]
其中,c
ij
为第(i,j)个网格单元的加权平均浓度,m为轨迹的总数,c
l
为第l条轨迹经过网络单元(i,j)时对应的污染物浓度,τ
ijl
为第l条轨迹在网格单元(i,j)停留的时间,w(n
ij
)为第(i,j)个网格单元的修正因子。
[0090]
其中,n
ij
为经过第(i,j)个网格单元的所有轨迹端点的总数。为了消除n
ij
较小的像元中的不确定性,将pscf值乘以任意权重函数w(n
ij
)可以更好地反映这些像元中值的不确定性,进而为权重轨迹分析模型做输入数据。轨迹主要为气团轨迹;轨迹总数及区分的原理为:模型计算方法是拉格朗日方法的一种混合方法,它使用了移动的参考系来进行对流和扩散计算,因为轨迹或空气包裹从其初始位置开始移动,而欧拉方法则使用固定的三维网格作为计算污染物空气浓度的参考;此外通过假定粉扑或颗粒的分散度来计算污染物的分散度,粉扑会膨胀直至超过气象网格的大小(水平或垂直),然后分成几个新的粉扑,每个粉扑都有其一定的污染物质量份额。在粒子模型中,固
定数量的粒子通过平均风场绕模型域平流,并通过湍流分量扩散。
[0091]
本实施例中pscf分析只能反映网格单元中污染轨迹的比例,而对于具有相同pscf值的区域,无法区分对目标对象污染水平的影响.因此,采用cwt方法以更好地突破上述限制并计算不同源区域的相对贡献,其通过将每个污染物浓度与网格相关的轨迹求平均,将停留时间加权浓度分配给每个网格单元。
[0092]
作为一种可选的实施方式,本实施例中将获取的后向轨迹数据网格化还包括:将所述后向轨迹数据网格化为分辨率为1
°×1°
的网格。
[0093]
确定污染源区的显示色彩,即将所述污染源区根据不同的浓度,按照颜色区分并显示。本实施例中vocs污染源区的污染物主要为识别出的特征组分。
[0094]
本实施例整体流程示意图如图2所示,通过获取目标点位的vocs和o3监测数据,并通过ccrm模型获取分析时段vocs特征组分,并将分析时段对应的气象数据输入后向轨迹模型,将后向轨迹网格化,再通过潜在源贡献因子模型和浓度权重轨迹分析模型确定特征组分的污染源区分布。采用本实施例提供的vocs特征组分污染源区的确定方法,操作简单,能够实现对区域的vocs特征组分污染来源解析、对识别特征组分潜在污染来源贡献重点区进行论证,进而实现vocs特征组分污染贡献重点区识别,为研究大气污染治理分区(尤其是o3污染)管控提供有力支撑。
[0095]
实施例二:
[0096]
如图3所示,本实施例提供了一种确定大气vocs特征组分污染源区的系统,所述系统包括:
[0097]
数据获取模块m1,用于获取目标区域在若干个监测时段内的vocs监测数据。
[0098]
数据初级处理模块m2,用于:
[0099]
对于每个监测时段:
[0100]
将所述vocs监测数据输入特征组分识别模型,得到vocs中各组分的参数值;
[0101]
根据所述vocs中各组分的参数值选取所述组分作为vocs特征组分;
[0102]
获取所述目标区域中与所述vocs特征组分具有相同监测时段的气象数据。
[0103]
后向轨迹数据获取模块m3,用于将所有所述监测时段的所述气象数据输入后向轨迹模型,得到后向轨迹数据。
[0104]
网格化模块m4,用于将所述后向轨迹数据网格化。
[0105]
污染时段获取模块m5,用于将所述vocs特征组分的浓度值超过预设阈值的所述监测时段作为污染监测时段。
[0106]
污染来源计算模块m6,用于利用所述污染监测时段的后向轨迹数据根据潜在源贡献因子pscf计算污染来源网格;所述污染来源网格即为大气vocs特征组分污染源区。
[0107]
实施例三:
[0108]
本实施例提供了一种确定大气vocs特征组分污染源区的方法,包括:
[0109]
(1)获取目标点位vocs和o3监测数据。
[0110]
(2)明确分析vocs和o3监测时段。
[0111]
(3)将分析时段的vocs组分数据输入特征组分识别模型(characteristic component recognition model,简称ccrm模型)中,得出对应特征组分参数,并确认其浓度值。
[0112]
(4)获取与分析时段匹配的气象数据。
[0113]
(5)将获取的气象数据输入后向轨迹模型,并将获取的后向轨迹数据网格化。
[0114]
(6)将vocs特征组分浓度数据输入潜在源贡献因子分析模型,并根据o3浓度对应vocs观测值确定vocs特征组分对应的潜在源贡献因子pscfxy。
[0115]
(7)将vocs特征组分浓度数据输入浓度权重轨迹分析模型,并根据o3浓度对应vocs观测值确定vocs特征组分对应的权重因子cwtxy。
[0116]
本实施例提供了一种关于vocs特征组分潜在污染源区确定的方法,提高了潜在污染源区识别的准确性。
[0117]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0118]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。