1.本技术涉及电力电子技术领域,更具体地,涉及一种三电平直流-直流变换器以及控制电路。
背景技术:
2.现有技术所采用的三电平直流-直流变换器如图1所示,为三电平buck变换器,其包括功率管s1-s4、飞跨电容cf、电感l和输出电容co。其中,功率管s1和s4的驱动信号g
s1
和g
s4
互补,功率管s2和功率管s3的驱动信号g
s2
和g
s3
互补。并且,功率管s1和s2的驱动信号g
s1
和g
s2
的占空比相等,且功率管s1和s2的驱动信号g
s1
和g
s2
的相位差α为180
°
(π弧度)。
3.但是,由于电路中的寄生参数以及各个电路器件的误差等因素的影响,飞跨电容cf的电压可能会出现大于1/2v
in
或小于1/2v
in
等不平衡的情况,这可能造成电感l的电流不稳定,进而降低整个电路的可靠性。
4.现有技术中有很多种控制方式来解决飞跨电容的电压不平衡的问题。根据飞跨电容的电压与1/2v
in
的差来调节功率管s1和s2的驱动信号的相位差α,假设原状态相位差α=π,d1=d2=d,若飞跨电容cf的电压v
cf
小于1/2v
in
,则增大相位差α,使得飞跨电容的充电电荷量qc》放电电荷量qd,即电荷量增加了δq。同理,若飞跨电容电压v
cf
大于1/2v
in
,则减小相位差α,可使qc《qd,即电荷量减小了δq。但是仅通过移相控制来平衡飞跨电容电压的方法,在ccm工作模式下占空比接近0或接近1时均压能力较弱,在dcm工作模式下d《0.5时,移相控制的均压能力为0,无法进行均压。
技术实现要素:
5.有鉴于此,本发明实施例提供一种三电平直流-直流变换器以及控制电路,弥补移相均压控制在ccm工作模式下占空比接近0或接近1时均压能力较弱,在dcm工作模式下d《0.5时无法进行均压的缺点,以保证飞跨电容的电压值在任何负载下均能够稳定在预定范围内,从而提高系统的可靠性。
6.根据本发明的第一方面,提出了一种三电平直流-直流变换器的控制电路,所述三电平直流-直流变换器包括串联连接在输入电压与参考地之间的第一至第四功率管以及连接在第一和第二功率管的公共节点与第三和第四功率管的公共节点之间的飞跨电容,其特征在于,所述控制电路被配置为:
7.根据所述飞跨电容的电压值和预设值之间的误差调节所述第一功率管和第二功率管的驱动信号的相位差以及所述驱动信号的占空比,从而使得所述飞跨电容的电压值稳定在预设值。
8.具体地,当所述飞跨电容的电压值大于所述预设值时,所述控制电路被配置为控制所述相位差减小,所述第一功率管的占空比减小,所述第二功率管的占空比增大;当所述飞跨电容的电压值小于所述预设值时,所述控制电路被配置为控制所述相位差增大,所述第一功率管的占空比增大,所述第二功率管的占空比减小。
9.具体地,所述占空比的变化量与所述相位差的变化量成正比。
10.具体地,所述占空比的变化量与所述相位差的变化量的比例系数为常数。
11.具体地,所述占空比的变化量与所述相位差的变化量的比例系数为与占空比有关的函数。
12.具体地,所述控制电路包括:
13.反馈补偿电路,被配置为对表征所述三电平直流-直流变换器的输出信号的反馈信号和表征所述输出信号的期望值的基准信号的误差进行补偿以产生反馈补偿信号;
14.电容平衡电路,被配置为根据所述飞跨电容的电压值和所述预设值之间的误差调节所述第一功率管和第二功率管的驱动信号的相位差;
15.驱动电路,被配置为根据所述补偿信号和占空比调节信号产生控制所述三电平直流-直流变换器中功率管的驱动信号,其中所述占空比调节信号根据所述相位差的变化量产生。
16.具体地,所述电容平衡电路包括:
17.电容补偿电路,被配置为根据所述飞跨电容的电压值和所述预设值之间的误差产生第一电容补偿信号,并根据所述第一电容补偿信号与偏置电压之和得到第二电容补偿信号;以及
18.锯齿波产生电路,被配置为根据开关周期和所述第二电容补偿信号产生周期等于所述开关周期且峰峰值相等的第一锯齿波信号和第二锯齿波信号。
19.具体地,所述第一电容补偿信号用以表征所述第一锯齿波信号和所述第二锯齿波信号之间的相位差的变化量。
20.具体地,所述偏置电压等于所述第一锯齿波信号的峰峰值的1/2。
21.具体地,所述电容补偿电路包括:
22.采样电路,被配置为获取表征所述飞跨电容的电压值的电容电压采样信号;
23.误差放大器,被配置为获取所述电容电压采样信号和表征所述预设值的参考信号之间的误差;
24.补偿网络,被配置为对所述误差进行补偿得到第一电容补偿信号;以及
25.偏置电路,被配置为获取所述第一电容补偿信号与所述偏置电压之和以产生所述第二电容补偿信号。
26.具体地,所述锯齿波产生电路包括:
27.第一锯齿波产生电路,被配置为产生周期与所述开关周期相等的第一时钟信号,并受控于所述第一时钟信号产生所述第一锯齿波信号;以及
28.第二锯齿波产生电路,被配置为将所述第一锯齿波信号与所述第二电容补偿信号比较以产生第二时钟信号,并根据所述第二时钟信号产生所述第二锯齿波信号,其中所述第一和第二锯齿波信号的峰峰值相同。
29.具体地,所述第二锯齿波产生电路包括:
30.时钟产生电路,被配置为根据第二电容补偿信号和所述第一时钟信号产生第二时钟信号,其中所述第二电容补偿信号用于调节所述第一时钟信号和所述第二时钟信号之间的相位差;以及
31.锯齿波发生器,受控于所述第二时钟信号以产生所述第二锯齿波信号,其中所述
第二锯齿波信号的周期与所述第二时钟信号的周期相同。
32.具体地,所述驱动电路包括:
33.第一驱动电路,被配置为根据第一补偿信号和第一锯齿波信号的比较结果产生第一驱动信号,以根据所述第一驱动信号来控制所述第一和第四功率管;以及
34.第二驱动电路,被配置为根据第二补偿信号和第二锯齿波信号的比较结果产生第二驱动信号,以根据所述第二驱动信号来控制所述第二和第三功率管,其中
35.所述第一补偿信号为所述反馈补偿信号与所述占空比调节信号之和;所述第二补偿信号为所述反馈补偿信号与所述占空比调节信号之差。
36.具体地,所述占空比调节信号与所述第一电容补偿信号成正比。
37.具体地,所述预设值为所述输入电压的1/2。
38.根据本发明的第二方面,提出了一种三电平直流-直流变换器,其特征在于,包括:
39.第一至第四功率管,串联连接在输入电压和参考地之间;
40.飞跨电容,连接在所述第一和第二功率管的公共节点与所述第三和第四功率管的公共节点;以及
41.上述任一项所述的控制电路。
42.具体地,所述三电平直流-直流变换器还包括:
43.电感,连接在所述第二和第三功率管的公共节点与输出端之间。
44.具体地,当所述三电平直流-直流变换器处于电流连续模式时,所述第一功率管和所述第四功率管的驱动信号互补,所述第二功率管和所述第三功率管的驱动信号互补,且所述第一功率管和所述第二功率管的驱动信号之间具有相位差。
45.具体地,当所述三电平直流-直流变换器处于电流断续模式时,所述第四功率管受所述第一功率管的关断时刻控制而导通,并在电感电流到零时关断;所述第三功率管受所述第二功率管的关断时刻控制而导通,并在电感电流到零时关断,且所述第一功率管和所述第二功率管的驱动信号之间具有相位差。
46.本发明实施例的技术方案根据飞跨电容的电压值与预设值之间的误差调节三电平直流-直流变换器中第一和第二功率管之间的相位差,并同时根据相位差的变化量来调节占空比,进而使得飞跨电容的电压值在任何负载下均能够稳定在预定范围内,从而在降低直流-直流变换器中的各个功率管所需承受的电压的同时,提高系统的可靠性。
附图说明
47.通过以下参照附图对本技术实施例的描述,本技术的上述以及其它目的、特征和优点将更为清楚,在附图中:
48.图1是现有技术的三电平直流-直流变换器的电路示意图;
49.图2是现有技术的三电平直流-直流变换器在ccm工作模式下的工作波形图;
50.图3是现有技术的三电平直流-直流变换器在dcm工作模式下的工作波形图;
51.图4是本发明实施例的三电平直流-直流变换器在ccm工作模式下的工作波形图;
52.图5是本发明实施例的三电平直流-直流变换器在dcm工作模式下的工作波形图;
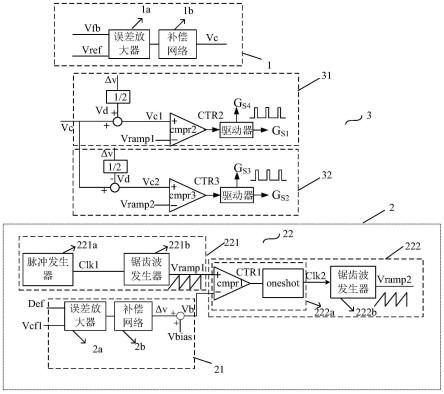
53.图6是本发明实施例的三电平直流-直流变换器的控制电路示意图;以及
54.图7是本发明实施例的三电平直流-直流变换器的控制波形图。
具体实施方式
55.以下基于实施例对本技术进行描述,但是本技术并不仅仅限于这些实施例。在下文对本技术的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本技术。为了避免混淆本技术的实质,公知的方法、过程、流程、元件和电路并没有详细叙述。
56.此外,本领域普通技术人员应当理解,在此提供的附图都是为了说明的目的,并且附图不一定是按比例绘制的。
57.同时,应当理解,在以下的描述中,“电路”是指由至少一个元件或子电路通过电气连接或电磁连接构成的导电回路。当称元件或电路“连接到”另一元件或称元件/电路“连接在”两个节点之间时,它可以是直接耦接或连接到另一元件或者可以存在中间元件,元件之间的连接可以是物理上的、逻辑上的、或者其结合。相反,当称元件“直接耦接到”或“直接连接到”另一元件时,意味着两者不存在中间元件。
58.除非上下文明确要求,否则整个说明书和权利要求书中的“包括”、“包含”等类似词语应当解释为包含的含义而不是排他或穷举的含义;也就是说,是“包括但不限于”的含义。
59.在本技术的描述中,需要理解的是,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,在本技术的描述中,除非另有说明,“多个”的含义是两个或两个以上。
60.图2给出了现有技术的三电平直流-直流变换器在ccm工作模式下的工作波形,图3给出了现有技术的三电平直流-直流变换器在dcm工作模式下的工作波形。以图1所示的三电平buck变换器为例,均采用调节功率管s1和s2的驱动信号g
s1
和g
s2
的相位差α的方式来平衡飞跨电容电压v
cf
。其中定义s1、s2分别为电感电流i
l
上升和下降的斜率大小,则可以得出如下等式:
[0061][0062][0063]
1)在ccm工作模式下
[0064]
假设相位差α的变化量为δα,则此时飞跨电容的电荷变化量δq的大小如式(2)所示,其中ts为开关周期。显然,d《0.5时,δq的大小与d和δα成正比,d》0.5时,δq的大小与(1-d)和δα成正比。故在d接近0和接近1时,δq接近0。因此移相控制在占空比接近0或接近1时均压能力较弱。
[0065][0066]
2)在dcm工作模式下
[0067]
假设相位差α的变化量为δα,则此时飞跨电容的电荷变化量δq的大小如式(3)所示。显然,d《0.5时,移相控制的均压能力为0,无法进行均压。
[0068][0069]
具体的分析过程在此不再详细阐述,本领域普通技术人员可以通过简单分析得到上述等式。综上,仅采用调节相位差的方式来平衡飞跨电容电压,会使得在ccm工作模式下占空比接近0或接近1时均压能力较弱,在dcm工作模式下d《0.5时无法进行均压,因此不能保证飞跨电容电压在全负载范围内都可以维持在预定值。
[0070]
因此,本发明提出了一种新的三电平直流-直流变换器的电容均压控制方法,根据飞跨电容的电压值与预设值之间的误差调节三电平直流-直流变换器的第一和第二功率管之间的相位差(以下简称相位差),并同时根据相位差的变化量来调节占空比,进而使得飞跨电容的电压值在任何负载下均能够稳定在预定范围内。
[0071]
具体地,当飞跨电容cf的电压v
cf
》1/2v
in
时,相位差α减小δα,功率管s1的占空比d1减小δd,功率管s2的占空比d2增大δd;当飞跨电容cf的电压v
cf
《1/2v
in
时,相位差α增大δα,功率管s1的占空比d1增大δd,功率管s2的占空比d2减小δd;且δd与δα的变化趋势相同,δd随着δα的增大而增大,随着δα的减小而减小。应理解,在此所说的δd和δα均指变化量的绝对值。优选地,δα和δd成正比例关系。优选地,δd=kδα/(2π),k》0。
[0072]
下面具体阐述上述本发明的控制策略能够在全负载范围内有效平衡飞跨电容电压的原理。
[0073]
假设初始状态下相位差α=π,占空比d1=d2=d,充电电荷量qc=放电电荷量qd,若飞跨电容电压v
cf
《1/2v
in
,则相位差α增大δα,功率管s1的占空比d1增大δd,功率管s2的占空比d2减小δd,且δd=k1δα(其中k1=k/(2π)),如图4和图5所示。在d《0.5和d》0.5的情况下均是,在充电时间tc之前的电感电流续流时间由于相位差的增大而减小,使得电感电流i
l
在充电期间的起始点变高,充电期间的电感电流i
l
有所上升,并且充电时间tc由于占空比d1的增大而变长,因此充电电荷量qc增大;在放电时间td之前,电感电流i
l
的续流时间由于相位差的增大而增大,使得电感电流i
l
在放电期间的起始点变低,放电期间的i
l
有所下降,并且放电时间td缩短由于占空比d2的减小而减小,因此放电电荷量qd减小,从而使得电荷量增加了δq,飞跨电容cf的电压v
cf
升高。同理,若飞跨电容电压v
cf
》1/2v
in
,则相位差α减小δα,d1减小δd,d2增大δd,且δd=k1δα,使得电荷量减小了δq,飞跨电容电压v
cf
降低。故本控制策略可有效平衡飞跨电容电压。
[0074]
具体地,在ccm工作模式下,由图4可推导出δq的表达式如式(4)所示:
[0075][0076]
由于式(4)需要满足δq大于0,即在全负载范围下,io最小为0,此时也即需要保证δα/2π-δd》0。由于δd=kδα/(2π),则有(1-k)δα》0,因此k小于1。应理解,k可以为小于1的任意常数,当然k也可以为变量,只要保证在任一时刻k均小于1即可。例如k可以为与占空比d有关的函数,i.e.,k=2d或k=1/2d 0.5等,均可以使得在任一时刻k小于1。当然,上述k的取值范围是在全负载范围的前提下,而在具体应用中,若负载电流io的最小值大于0,则k大于1也能成立使得δq大于0,因此k的取值需要根据实际的负载情况来选取。
[0077]
显然,从上式(4)中可以看出,在d《0.5和d》0.5的情况下,δq的表达式均由两部分
组成,其第一部分均随着负载电流io的增大而增大,与占空比d无关,因此不存在占空比d接近0或1时均压能力弱的问题。
[0078]
另外,在dcm工作模式下,由图5可推导出δq的表达式如式(5)所示:
[0079][0080]
同样,式(5)也需要满足δq大于0。从式(5)中可以看出,当d小于0.5时,δq与k无关,因此k只要大于0即可;d大于0.5时,需要确保δα/2π-δd》0,如上所述,为了在全负载范围内满足该等式,则k只能取0-1之间。
[0081]
因此,采用本发明实施例的控制方法后,在dcm模式下d《0.5时,δq显然大于0,具有一定的均压能力,故本控制弥补了此时移相控制均压能力为0的缺点。
[0082]
图6是本发明实施例的三电平直流-直流变换器的控制电路示意图。以图1所示的三电平buck变换器为例,对其控制电路进行说明。如图6所示,控制电路包括反馈补偿电路1、电容平衡电路2以及驱动电路3。反馈补偿电路1被配置为根据表征输出电压vout的反馈信号vfb和表征输出电压期望值的基准信号vref的误差产生反馈补偿信号vc。电容平衡电路2被配置为根据飞跨电容cf两端的电压v
cf
和预设值之间的误差来调节功率管s1和s2之间的相位差。其中电容平衡电路2包括电容补偿电路21和锯齿波产生电路22。其中电容补偿电路21被配置为根据飞跨电容cf两端的电压v
cf
和预设值的误差产生第一电容补偿信号δv,并根据第一电容补偿信号δv与偏置电压vbias之和得到第二电容补偿信号vb。锯齿波产生电路22用于根据开关周期产生控制功率管s1和s4的第一锯齿波信号vramp1,以及用于根据开关周期和第二电容补偿信号vb产生控制功率管s2和s3的第二锯齿波信号vramp2,其中vramp1和vramp2的周期等于开关周期且峰峰值相等。在本实施例中,第一电容补偿信号δv表征第一和第二锯齿波信号之间的相位差的变化量,也即功率管s1和功率管s2之间的相位差的变化量δα,并且偏置电压vbias等于vramp1的峰峰值的1/2。驱动电路3根据反馈补偿信号vc和占空比调节信号vd产生控制功率管s1-s4的驱动信号,其中占空比调节信号vd与第一电容补偿信号δv成正比,也即vd=kδv,用于调节功率管的占空比。具体地,驱动电路3根据反馈补偿信号vc与占空比调节信号vd之和产生第一反馈补偿信号vc1,根据反馈补偿信号vc与占空比调节信号vd之差产生第二反馈补偿信号vc2,并将第一补偿信号vc1与第一锯齿波信号vramp1比较以产生控制功率管s1和s4的驱动信号,将第二补偿信号vc2和第二锯齿波信号vramp2比较以产生控制功率管s2和s3的驱动信号。其中,功率管s1和s4的驱动信号互补,功率管s2和s3的驱动信号互补,功率管s1和s2的驱动信号之间具有相位差α。
[0083]
具体地,反馈补偿电路1包括误差放大器1a,用于接收反馈信号vfb和基准信号vref,以产生误差信号;以及补偿网络1b,用于对误差信号进行补偿以产生反馈补偿信号vc。
[0084]
电容补偿电路21包括采样电路(图中未示出),用以采样飞跨电容cf两端的电压v
cf
并产生电容电压采样信号vcf1;误差放大器2a,用于获取电容电压采样信号vcf1和表征预设值(1/2vin)的参考信号def的误差;补偿网络2b,用于对该误差进行补偿得到第一电容补偿信号δv;以及偏置电路,用于将第一电容补偿信号δv与偏置电压vbias叠加得到第二电容补偿信号vb作为电容补偿电路21的输出信号,其中偏置电压vbias的设置是为了使得在
第一电容补偿信号δv为零时,相位差为π。
[0085]
锯齿波产生电路22包括第一锯齿波产生电路221和第二锯齿波产生电路222。第一锯齿波产生电路221包括脉冲发生器221a,用于根据设置的开关周期产生第一时钟信号clk1;以及锯齿波发生器221b,受控于第一时钟信号clk1产生第一锯齿波信号vramp1,其中第一锯齿波信号vramp1的峰峰值为vpk,周期与开关周期相同。第二锯齿波产生电路222包括时钟信号产生电路222a以及锯齿波发生器222b,其中时钟信号产生电路222a用于根据第二电容补偿信号vb和第一时钟信号clk1产生第二时钟信号clk2,其中第二电容补偿信号vb用于调节第一时钟信号clk1和第二时钟信号clk2之间的相位差。具体地,时钟信号产生电路222a包括比较器cmpr1以及单触发电路oneshot。其中比较器cmpr1用于将第二电容补偿信号vb与第一锯齿波信号vramp比较以产生第一控制信号ctr1,单触发电路oneshot根据第一控制信号ctr1生成第二时钟信号clk2,其中第二时钟信号clk2与第一时钟信号clk1的周期相同,两者之间的相位差由第二电容补偿信号vb调节。锯齿波发生器222b受控于第二时钟信号clk2产生第二锯齿波信号vramp2,其中第二锯齿波信号vramp2的峰峰值为vpk,周期与开关周期相同,也即第二锯齿波信号vramp2与第一锯齿波信号vramp1周期和幅值相同,仅相位不同,且两者的相位差根据第二电容补偿信号vb来调节。
[0086]
驱动电路3包括第一驱动电路31,被配置为根据第一补偿信号vc1和第一斜坡信号vramp1的比较结果产生用于控制功率管s1和s4的驱动信号g
s1
和g
s4
,其中反馈补偿信号vc与占空比调节信号vd之和为第一补偿信号vc1;以及第二驱动电路32,被配置为根据第二补偿信号vc2和第二斜坡信号vramp2的比较结果产生用于控制功率管s2和s3的驱动信号g
s2
和g
s3
,其中反馈补偿信号vc与占空比调节信号vd之差为第二补偿信号vc2。占空比调节信号vd与第一电容补偿信号δv成正比,即vd=kδv,在本实施例中k=1/2。
[0087]
为了简化说明,在本实施例中,以第一锯齿波信号vramp1和第二锯齿波信号vramp2的峰峰值均为1为例进行说明。本领域普通技术人员可以理解,根据控制原理,此时反馈补偿信号vc等于未加入本方案的占空比d,第一电容补偿信号δv用于表征功率管s1和功率管s2之间相位差的变化量δα,其中δv
×
2π=δα,而根据上述原理分析,δd应等于kδα/(2π),也即δd=k
×
δv
×
2π/(2π)=kδv,因此,在反馈补偿信号vc中叠加kδv得到第一补偿信号vc1,相当于得到新的第一占空比d1=d δd,在反馈补偿信号vc中减去kδv得到第二补偿信号vc2,相当于得到新的第二占空比d2=d-δd,从而在调节相位差的基础上进一步通过调节占空比的方式来平衡飞跨电容电压v
cf
,使其在全负载范围内均可以平衡在预设值(1/2vin)。
[0088]
具体地,第一驱动电路包括比较器cmpr2,其第一输入端(i.e.,同相输入端)接收第一补偿信号vc1,第二输入端(i.e.,反相输入端)接收第一锯齿波信号vramp1,经比较而在输出端产生占空比为d1的逻辑驱动信号ctr2,经驱动器放大后产生驱动信号g
s1
和g
s4
。第二驱动电路包括比较器cmpr3,其第一输入端(i.e.,同相输入端)接收第二补偿信号vc2,第二输入端(i.e.,反相输入端)接收第二锯齿波信号vramp2,经比较而在输出端产生占空比为d2的逻辑驱动信号ctr3,经驱动器放大后产生驱动信号g
s2
、g
s3
。
[0089]
当然,本领域技术人员可以理解,若第一锯齿波信号vramp1和第二锯齿波信号vramp2的峰峰值不为1,而是为其他数值时,对本控制方法不会产生影响,此时仍然是反馈补偿信号vc kδv得到第一补偿信号vc1,使得第一占空比d1=d δd;在反馈补偿信号vc中
减去kδv得到第二补偿信号vc2,使得第二占空比d2=d-δd。
[0090]
综上所述,当飞跨电容电压v
cf
小于预设值(1/2vin)时,驱动信号g
s1
和g
s2
之间的相位差增大δα,同时占空比d1增大δd,占空比d2减小δd,使得充电电荷量大于放电电荷量,从而使得飞跨电容电压v
cf
逐渐增加至预设值附近;当飞跨电容电压v
cf
大于预设值(1/2vin)时,驱动信号g
s1
和g
s2
之间的相位差减小δα,同时占空比d1减小δd,占空比d2增加δd,使得放电电荷量大于充电电荷量,从而使得飞跨电容电压v
cf
逐渐减小至预设值附近。
[0091]
图7为本发明实施例的三电平直流-直流变换器的控制波形图。以飞跨电容电压v
cf
大于预设值为例进行说明。
[0092]
在t1之前,电路处于稳定状态,飞跨电容电压v
cf
稳定在1/2vin,因此第二电容补偿信号vb等于vramp1的峰峰值的一半,从而使得第二时钟信号clk2与第一时钟信号clk1之间的相位差α=π。反馈信号vfb和基准信号vref的误差经补偿网络后产生反馈补偿信号vc控制输出电压vout为期望值。反馈补偿信号vc分别产生第一补偿信号vc1和第二补偿信号vc2,以在第一锯齿波信号vramp1上升至第一补偿信号vc1时,使驱动信号g
s1
无效,g
s1
在第一时钟信号clk1到来时有效;在第二锯齿波信号vramp2上升至第二补偿信号vc2时,使驱动信号g
s2
无效,g
s2
在第二时钟信号clk2到来时有效。其中在t1之前,vc1=vc2=vc,因此d1=d2=d。
[0093]
在t1时刻,飞跨电容电压v
cf
大于预定值1/2vin,δv减小,第二电容补偿信号vb减小,从而使得相位差α减小,待重新稳定后第一时钟信号clk1和第二时钟信号clk2之间的相位差等于α-δα,δα为正。由于第一补偿信号vc1=vc δv,第二补偿信号vc2=vc-δv,因此第一补偿信号vc1减小,第二补偿信号vc2增大,从而使得第一锯齿波信号vramp1上升到第一补偿信号vc1的时间变短,即占空比d1减小,稳定后d1等于d-δd;而第二锯齿波信号vramp2上升至第二补偿信号vc2的时间变长,即占空比d2增大,稳定后d2=d δd。
[0094]
由于占空比d1减小,d2增大,飞跨电容cf的充电时间tr减小,放电时间tf增大,同时由于相位差减小,充电阶段结束后的电感l的续流时间减小,使得在放电阶段流过电感l的平均电流值大于充电阶段流过电感l的平均电流值。也即,飞跨电容cf在充电阶段充入的电荷量qc(电流il对充电时间tr的积分)小于飞跨电容cf在放电阶段放出的电荷量qd(电流il对充电时间tf的积分)。因此,这使得飞跨电容cf的电压减小至预定范围内。
[0095]
类似地,在飞跨电容cf的电压小于预定值1/2vin时,δv增大,驱动信号g
s1
和g
s2
的相位差增大,同时占空比d1增大,占空比d2减小,从而使得在飞跨电容cf放电阶段流过电感l的平均电流值小于在飞跨电容cf充电阶段流过电感l的平均电流值。也即,飞跨电容cf在充电阶段充入的电荷量qc大于飞跨电容cf在放电阶段放出的电荷量qd。因此,这使得飞跨电容cf的电压值增大至预设值。
[0096]
容易理解,本实施例的技术方案同样适用于占空比d≥0.5的情况。
[0097]
在本实施例中,通过调节三电平直流-直流变换器中第一功率管和第二功率管之间的相位差,以及各功率管的占空比,使得飞跨电容的电压值稳定在预定值,其中占空比的变化量与相位差的变化量成正比。该方案在任何负载情况下均有效,这提高了电路的效率和稳定性。
[0098]
以上所述仅为本技术的优选实施例,并不用于限制本技术,对于本领域技术人员而言,本技术可以有各种改动和变化。凡在本技术的精神和原理之内所作的任何修改、等同
替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。