技术特征:
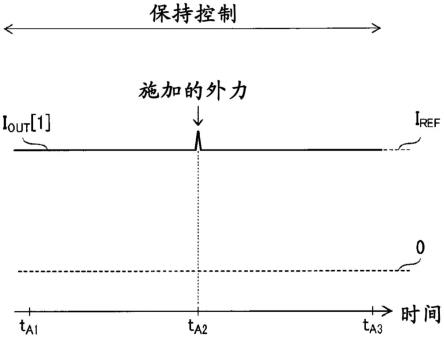
1.一种驱动器装置,所述驱动器装置利用通过向线圈供应输出电流而产生的磁性来移动可移动部件,所述驱动器装置包括:输出级电路,所述输出级电路被配置为通过向所述线圈施加电压来向所述线圈供应所述输出电流;以及控制电路,所述控制电路被配置为控制所述输出级电路,其中,所述控制电路被配置为能够通过对所述输出级电路的控制执行保持控制以通过暂停所述可移动部件的移动来保持所述可移动部件的状态不变,所述驱动器装置还包括:外力检测器,所述外力检测器被配置为在由所述控制电路进行的所述保持控制期间,基于由所述输出级电路向所述线圈供电的状态、所述输出电流或者流过所述输出级电路的电流,检测反抗所述保持控制而趋于改变所述可移动部件的状态的外力的施加。2.根据权利要求1所述的驱动器装置,其中,所述控制电路被配置为基于以下信号来控制所述输出级电路:电流设定信号,其设定要提供给所述线圈的所述输出电流的目标,和电流感测信号,其指示所述输出电流的检测结果,所述控制电路被配置为在所述保持控制中重复地执行包括供电模式操作和衰减模式操作的序列的单元操作,以使所述输出电流的大小接近由所述电流设定信号设定的目标大小,并且所述输出级电路被配置为,在所述供电模式操作中进入供电状态,其中所述输出级电路向所述线圈供电以增加所述输出电流的大小,并且在所述衰减模式操作中进入衰减状态,其中所述输出级电路暂停向所述线圈供电以减小所述输出电流的大小。3.根据权利要求2所述的驱动器装置,其中,所述控制电路被配置为,在每个单元操作中:执行所述供电模式操作至少持续预定的强制供电时间;如果当在所述供电模式操作开始之后已经经过所述强制供电时间时,检测到所述输出电流的大小等于或者大于所述目标大小,则结束所述供电模式操作;并且执行所述衰减模式操作持续预定衰减时间。4.根据权利要求2或3所述的驱动器装置,其中,所述外力检测器被配置为:检测在每个单元操作中所述输出级电路处于所述供电状态的时间作为输出导通时间,并且基于在所述控制电路中执行所述保持控制的检测目标时段期间所述输出导通时间的变化来检测所述外力的施加。5.根据权利要求4所述的驱动器装置,其中,所述检测目标时段包括第一时段和在所述第一时段之后发生的第二时段,并且所述外力检测器被配置为:
基于在所述第一时段期间被检测为所述输出导通时间的一个或者多个输出导通时间来设定参考导通时间,并且基于所述参考导通时间与所述第二时段期间的所述输出导通时间之间的比较来检测所述第二时段期间内所述外力的施加。6.根据权利要求5所述的驱动器装置,其中,所述外力检测器被配置为:在作为所述第二时段期间的所述输出导通时间的评估导通时间短于所述参考导通时间的情况下,如果所述参考导通时间与所述评估导通时间之间的差的绝对值等于或者大于预定差阈值,或者如果所述评估导通时间与所述参考导通时间的比率等于或者小于预定比率阈值,则识别所述第二时段期间内所述外力的施加。7.根据权利要求2或3所述的驱动器装置,其中,所述外力检测器被配置为,在所述控制电路中执行所述保持控制的检测目标时段期间,基于所述电流阈值与所述输出电流的大小之间的比较,使用大于所述目标大小的电流阈值来检测所述外力的施加。8.根据权利要求7所述的驱动器装置,其中,所述外力检测器被配置为,如果在所述检测目标时段期间检测到具有大于所述电流阈值的大小的所述输出电流,则识别所述外力的施加。9.根据权利要求2或3所述的驱动器装置,其中,所述外力检测器被配置为,在所述控制电路中执行所述保持控制的检测目标时段期间,基于在所述输出级电路处于供电状态的情况下所述输出电流的大小增加的斜率来检测所述外力的施加。10.根据权利要求9所述的驱动器装置,其中,所述外力检测器被配置为,在所述检测目标时段期间,在每个单元操作中,检测在所述输出级电路处于所述供电状态的情况下所述输出电流的大小增加的斜率,并且如果所述斜率被检测为等于或者大于预定斜率阈值,则识别所述外力的施加。11.根据权利要求9所述的驱动器装置,其中,所述检测目标时段包括第一时段和在所述第一时段之后发生的第二时段,并且所述外力检测器被配置为,基于在所述第一时段期间被检测为所述斜率的一个或者多个斜率来设定参考斜率,然后,基于所述参考斜率与所述第二时段期间的所述斜率之间的比较,检测所述第二时段期间内所述外力的施加。12.根据权利要求11所述的驱动器装置,其中,所述外力检测器被配置为,在作为所述第二时段期间的所述斜率的评估斜率大于所述参考斜率的情况下,如果所述参考斜率与所述评估斜率之间的差的绝对值等于或者大于预定差阈值,或者如果所述评估斜率与所述参考斜率的比率等于或者大于预定比率阈值,则识别所述第二时段期间内所述外力的施加。13.根据权利要求1至3中任一项所述的驱动器装置,其中,所述输出级电路包括全桥电路,所述全桥电路包括四个输出晶体管,对应于所述输出电流的电流分别流过所述输出晶体管,所述外力检测器被配置为:
基于分别流过所述输出晶体管的所述电流的检测结果来分别获取所述输出晶体管中的电流波形;并且在所述控制电路中执行所述保持控制的检测目标时段期间,基于所述输出晶体管中的所述电流波形与预定电流波形之间的比较来检测所述外力的施加。14.根据权利要求1至13中任一项所述的驱动器装置,其中,所述外力检测器被配置为,如果检测到要被施加的所述外力,则将预定的检测信号传输到所述驱动器装置外部的设备。15.根据权利要求1至14中任一项所述的驱动器装置,其中,所述驱动器装置是用于步进马达的驱动器装置,所述线圈设置在所述步进马达中,所述可移动部件是所述步进马达的转子,并且所述可移动部件的所述移动是所述转子的旋转,在所述保持控制中,所述转子的角度保持不变,并且所述外力是趋于使所述转子抵抗所述保持控制而旋转的外力。16.根据权利要求15所述的驱动器装置,其中,在所述步进马达中设置多个线圈作为所述线圈,在所述驱动器装置中,多个通道电路分别分配给所述多个线圈,并且多个所述输出级电路和多个所述控制电路分别提供给所述通道电路,并且所述转子由于在所述通道电路中对所述输出电流的控制而旋转。
技术总结
一种驱动器装置,包括用于控制输出级电路的控制电路,该输出级电路用于向线圈供应输出电流,并且使可移动部件随着由所述供应的输出电流所产生的磁性而移动。该控制电路可以执行保持控制以通过暂停所述可移动部件的移动来保持其状态不变。在由该控制电路进行的该保持控制期间,基于由输出级电路向线圈供电的状态、输出电流或者流过输出级电路的电流,检测反抗所述保持控制而趋于改变可移动部件的状态的外力的施加。态的外力的施加。态的外力的施加。
技术研发人员:宫城亮太 桥本浩树
受保护的技术使用者:罗姆股份有限公司
技术研发日:2021.03.18
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。