1.本发明涉及架空输电线机器人技术领域,尤其涉及一种无辅助旁路越塔的架空输电线路机器人。
背景技术:
2.在国内外的电力行业中,架空输电线路机器人可以满足一些特殊环境下的使用要求,为了提高机器人的使用范围,机器人要具备跨塔行走的功能。市面上主流的架空输电线路机器人跨塔方式是通过搭建辅助旁路,机器人先从一侧前行上旁路,再从另一侧下旁路,才能完成过塔。
3.辅助旁路有很多缺点,比如:每级杆塔都需要搭建辅助轨道,搭建时需要大量的人力物力;架空输电线路通常为停电作业,停电周期短从而导致施工压力大,设计人员无法高空高压作业,验收困难,停电周期内无法完成安装则需要带电作业或等到下个停电周期再施工,大大增加了项目的周期;安装有一定的工艺要求,技术人员无法登塔验收;旁路需要与地线连接,防震锤、接地金具、悬垂线夹、护线条等都有会影响到旁路的安装及设计;旁路的通用性较差,不同的杆塔结构对旁路的结构有影响。
技术实现要素:
4.目前架空输电线路机器人需要搭建辅助旁路才能实现跨塔功能,本发明的目的在于提供一种无辅助旁路越塔的架空输电线路机器人,可以无需搭建辅助旁路,实现跨越直线塔或小型耐张塔的功能的问题。
5.为实现上述目的,本发明提供如下技术方案:一种无辅助旁路越塔的架空输电线路机器人,包括有安设于机器人顶部的控制盒与横杆,所述控制盒滑动设置于横杆的底部,所述横杆的顶部两端均滑动设置有竖直伸缩机构,所述竖直伸缩机构呈竖直方向设置于横杆的顶部,所述竖直伸缩机构的顶部设置有双向伸缩机构,所述双向伸缩机构的两端分别设置有前轮臂与后轮臂,所述后轮臂的顶部设置有用于驱动的动力轮,所述前轮臂的顶部设置有支撑轮,所述控制盒内部设置有控制开关,所述控制开关分别连接竖直伸缩机构与双向伸缩机构。
6.优选地,所述动力轮与支撑轮位置对应。
7.优选地,所述前轮臂的外部一侧滑动设置定位块,所述定位块外部套设有压紧轮,所述压紧轮呈横向设置于支撑轮的底部。
8.优选地,所述前轮臂的顶部两端对称设置有两个所述支撑轮,所述后轮臂的顶部两端对称设有两个所述动力轮。
9.优选地,所述竖直伸缩机构设置有两个,两个所述竖直伸缩机构对称设置于横杆的顶部,所述竖直伸缩机构的内部还设置有推杆,所述推杆的一端连接动力输出端,所述推杆的另一端向上延伸并与所述双向伸缩机构相连接。
10.优选地,所述双向伸缩机构呈横向设置于竖直伸缩机构顶部,且所述双向伸缩机
构的两端均设置有动力输出端,且所述双向伸缩机构的动力输出端分别连接后轮臂与前轮臂。
11.优选地,所述横杆的顶部设置有滑轨,所述竖直伸缩机构的底部设置有第一滑块,所述所述滑轨与第一滑块相配合。
12.优选地,所述横杆的底部设置有滑槽,所述控制盒的顶部设置有第二滑块,所述第二滑块滑动设置于滑槽内部。
13.优选地,所述动力轮整体呈“凹”字形,且所述动力轮卡接于线缆上优选地,所述控制盒底部通过固定螺丝安设于机器人顶部。
14.与现有技术相比,本发明提供了一种无辅助旁路越塔的架空输电线路机器人,具有以下效果:
15.防脱轨功能:通过双向伸缩机构带动后轮臂与前轮臂,从而使前轮臂上的支撑轮与后轮臂上的动力轮相抵接,对线缆构成闭合的环形,防止机器人存在脱轨坠落的风险,动力轮设计成“凹”字形结构,即使误操作或高电磁场环境下传感器受到干扰误触发导致机器人误动作也始终有一组轮组悬挂在线缆上,故不存在脱轨的风险。
16.越障功能:由于动力轮与支撑轮相抵接闭合时,过线缆上的防震锤或接续管时,无需任何控制动作便可完成越障,且不会因障碍物导致轮子脱轨,减少了机器人越障程序配置时间。
17.爬坡功能:通过压紧轮沿前轮臂向上移动,使压紧轮与动力轮之间的间隙变小,从而压紧线缆,为动力轮提供额外的负载,从而增大摩擦力,从而使机器人具有一定的爬坡能力,满足山区杆塔线路的使用。
18.过塔功能:过塔步骤如下:
19.1)机器人行进至悬垂线夹前,控制盒内部的控制开关接收到过塔指令从而启动双向伸缩机构与竖直伸缩机构进行启动工作;
20.2)横杆顶部前后两端的竖直伸缩机构向横杆中间移动,使其横杆顶部后端的竖直伸缩机构与控制盒位置相对应,保证重心平衡;
21.3)横杆顶部前端的竖直伸缩机构上升,双向伸缩机构的动力输出端顶出带动后轮臂与前轮臂沿双向伸缩机构的水平方向移动,从而使动力轮与支撑轮打开;
22.4)横杆顶部前端的竖直伸缩机构沿横杆方向向前移动通过悬挂线夹或接地金具;
23.5)横杆前端的后轮臂与前轮臂越过悬挂线夹和接地金具后,双向伸缩机构的动力输出端收缩带动前轮臂与后轮臂沿双向伸缩机构水平移动,使动力轮与支撑轮抵接贴紧,横杆前端的竖直伸缩机构下降,横杆前端的后轮臂与前轮臂完成过塔;
24.6)横杆顶部前端的前轮臂与后轮臂过塔后,控制盒沿横杆向方滑动,通过控制盒沿横杆方向前移滑动并与横杆顶部前端的竖直伸缩机构位置相对应,从而保持重心平衡,同理,横杆后端的后轮臂与前轮臂重复以上步骤,其中,控制盒沿横杆方向向前滑动,控制盒,完成横杆后端的后轮臂与前轮臂实现过塔。
25.结合以上效果,本发明有效的达到无需搭建辅助旁路,实现跨越直线塔或小型耐张塔的功能的问题。
附图说明
26.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
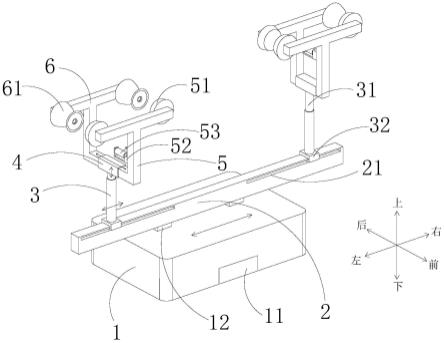
27.图1是本发明的整体结构示意图。
28.图2是本发明的实施例一的过塔步骤2示意图。
29.图3是本发明的实施例一的过塔步骤3示意图。
30.图4是本发明的实施例一的过塔步骤4示意图。
31.图5是本发明的实施例一的过塔步骤5示意图。
32.图6是本发明的实施例一的过塔步骤6示意图。
33.图7是本发明的实施例二的越障工作状态示意图。
34.图8是本发明的实施例三的爬坡工作状态示意图。
35.结合图中的标注所示:1、控制盒;2、横杆;3、竖直伸缩机构;4、双向伸缩机构;5、前轮臂;6、后轮臂;11、控制开关;12、第二滑块;21、滑轨;31、推杆;32、第一滑块;51、支撑轮;52、定位块;53、压紧轮;61、动力轮。
具体实施方式
36.下面结合附图对本发明作优选地说明:
37.在本发明的描述中,需要理解的是,术语“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“内”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了使子描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制;此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量;由此,限定有“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含地包括一个或者更多个该特征。
38.参考图1至图8,
39.实施例一
40.一种无辅助旁路越塔的架空输电线路机器人,包括有安设于机器人顶部的控制盒1与横杆2,所述控制盒1滑动设置于横杆2的底部,所述横杆2的顶部两端均滑动设置有竖直伸缩机构3,所述竖直伸缩机构3呈竖直方向设置于横杆2的顶部,所述竖直伸缩机构3的顶部设置有双向伸缩机构4,所述双向伸缩机构4的两端分别设置有前轮臂5与后轮臂6,所述后轮臂6的顶部设置有用于驱动的动力轮61,所述前轮臂5的顶部设置有支撑轮51,所述控制盒1内部设置有控制开关11,所述控制开关11分别连接竖直伸缩机构3与双向伸缩机构4,其中,控制开关11可通过传感器连接竖直伸缩机构3与双向伸缩机构4。
41.本实施中,所述动力轮61与支撑轮51位置对应;闭环时,所述支撑轮51与动力轮61相抵接,开环时,所述支撑轮51与动力轮61产生一定间距。
42.本实施中,所述前轮臂5的外部一侧滑动设置定位块52,所述定位块52外部套设有压紧轮53,所述压紧轮53呈横向设置于支撑轮51的底部;如上所述,有效的通过压紧轮53对
动力轮61起到限位作用,动力轮61卡接于架空线上,压紧轮53设置于与动力轮61底部相对应的位置处,动力轮61与压紧轮53之间的间隙可穿设线缆,防止机器人脱落。
43.本实施中,所述前轮臂5的顶部两端对称设置有两个所述支撑轮51,所述后轮臂6的顶部两端对称设有两个所述动力轮61;如上所述,通过前轮臂5的顶部两端对称设置有支撑轮51,后轮臂6顶部两端对称设置有两个动力轮61,提高了机器人整体在安设于线缆上时的稳定性,防止侧翻脱落的情况出现。
44.本实施中,所述竖直伸缩机构3设置有两个,两个所述竖直伸缩机构3对称设置于横杆2的顶部,所述竖直伸缩机构3的内部还设置有推杆31,所述推杆31的一端连接动力输出端,所述推杆31的另一端向上延伸并与所述双向伸缩机构4相连接。
45.本实施中,所述双向伸缩机构4呈横向设置于竖直伸缩机构3顶部,且所述双向伸缩机构4的两端均设置有动力输出端,且所述双向伸缩机构4的动力输出端分别连接后轮臂6与前轮臂5;如上所述,通过双向伸缩机构4带动前轮臂5与后轮臂6沿横向方向进行移动,其中,闭环时,双向伸缩机构4的动力输出端横向呈回缩运动,前轮臂5与后轮臂6相对横向移动从而使前轮臂5上的动力轮61与后轮臂6上的支撑轮51分离,开环时,双向伸缩机构4的动力输出端呈横向顶出运动,前轮臂5与后轮臂6相反横向移动,从而使前轮臂5的动力轮61与后轮臂6上的支撑轮51相互抵接贴合。
46.本实施中,所述横杆2的顶部设置有滑轨21,所述竖直伸缩机构3的底部设置有第一滑块32,所述所述滑轨21与第一滑块32相配合;如上所述,有效的通过第一滑块32外部可连接有第一驱动机构,第一驱动机构的动力输出端推动滑块,第一驱动机构可连接控制盒1,根据实际情况,在控制盒1启动第一驱动机构后,第一驱动机构带动竖直伸缩机构3于横杆2顶部进行滑动。
47.本实施中,所述横杆2的底部设置有滑槽,所述控制盒1的顶部设置有第二滑块12,所述第二滑块12滑动设置于滑槽内部;如上所述,有效的通过第二滑块12外部可连接有第二驱动机构,第二驱动机构的动力输出端推动第二滑块12,第二驱动机构可连接控制盒1,根据实际情况,在控制盒1启动第二驱动机构后,第二驱动机构带动第二滑块12,从而达到控制盒1于横杆2的底部进行滑动。
48.结合以上所述,第一驱动机构与第二驱动机构均可采用气缸。
49.本实施中,所述动力轮61整体呈“凹”字形,且所述动力轮61卡接于线缆上;如上所述,便于动力轮61与线路卡接。
50.本实施中,所述控制盒1底部通过固定螺丝安设于机器人顶部;如上所述,使机器人与控制盒1连接更加稳固。
51.结合实施例一,具有过塔功能,其中,过塔步骤如下:
52.1)机器人行进至悬垂线夹前,控制盒1内部的控制开关11接收到过塔指令从而启动双向伸缩机构4与竖直伸缩机构3进行启动工作;
53.2)横杆2顶部前后两端的竖直伸缩机构3向横杆2中间移动,使其横杆2顶部后端的竖直伸缩机构3与控制盒1位置相对应,保证重心平衡;
54.3)横杆2顶部前端的竖直伸缩机构3上升,双向伸缩机构4的动力输出端顶出带动后轮臂6与前轮臂5沿双向伸缩机构4的水平方向移动,从而使动力轮61与支撑轮51打开;
55.4)横杆2顶部前端的竖直伸缩机构3沿横杆2方向向前移动通过悬挂线夹或接地金
具;
56.5)横杆2前端的后轮臂6与前轮臂5越过悬挂线夹和接地金具后,双向伸缩机构4的动力输出端收缩带动前轮臂5与后轮臂6沿双向伸缩机构4水平移动,使动力轮61与支撑轮51抵接贴紧,横杆2前端的竖直伸缩机构3下降,横杆2前端的后轮臂6与前轮臂5完成过塔,过塔后,控制盒1沿横杆2向方滑动,通过控制盒1沿横杆2方向前移滑动并与横杆2顶部前端的竖直伸缩机构3位置相对应,从而保持重心平衡;
57.6)同理,横杆2后端的后轮臂6与前轮臂5重复以上步骤,其中,控制盒1沿横杆2方向向前滑动,控制盒1,完成横杆2后端的后轮臂6与前轮臂5实现过塔。
58.实施例二
59.一种无辅助旁路越塔的架空输电线路机器人,包括有安设于机器人顶部的控制盒1与横杆2,所述控制盒1滑动设置于横杆2的底部,所述横杆2的顶部两端均滑动设置有竖直伸缩机构3,所述竖直伸缩机构3呈竖直方向设置于横杆2的顶部,所述竖直伸缩机构3的顶部设置有双向伸缩机构4,所述双向伸缩机构4的两端分别设置有前轮臂5与后轮臂6,所述后轮臂6的顶部设置有用于驱动的动力轮61,所述前轮臂5的顶部设置有支撑轮51,所述控制盒1内部设置有控制开关11,所述控制开关11分别连接竖直伸缩机构3与双向伸缩机构4,其中,控制开关11可通过传感器连接竖直伸缩机构3与双向伸缩机构4。
60.本实施中,所述动力轮61与支撑轮51位置对应;闭环时,所述支撑轮51与动力轮61相抵接,开环时,所述支撑轮51与动力轮61产生一定间距。
61.本实施中,所述前轮臂5的外部一侧滑动设置定位块52,所述定位块52外部套设有压紧轮53,所述压紧轮53呈横向设置于支撑轮51的底部;如上所述,有效的通过压紧轮53对动力轮61起到限位作用,动力轮61卡接于架空线上,压紧轮53设置于与动力轮61底部相对应的位置处,动力轮61与压紧轮53之间的间隙可穿设线缆,防止机器人脱落。
62.本实施中,所述前轮臂5的顶部两端对称设置有两个所述支撑轮51,所述后轮臂6的顶部两端对称设有两个所述动力轮61;如上所述,通过前轮臂5的顶部两端对称设置有支撑轮51,后轮臂6顶部两端对称设置有两个动力轮61,提高了机器人整体在安设于线缆上时的稳定性,防止侧翻脱落的情况出现。
63.本实施中,所述竖直伸缩机构3设置有两个,两个所述竖直伸缩机构3对称设置于横杆2的顶部,所述竖直伸缩机构3的内部还设置有推杆31,所述推杆31的一端连接动力输出端,所述推杆31的另一端向上延伸并与所述双向伸缩机构4相连接。
64.本实施中,所述双向伸缩机构4呈横向设置于竖直伸缩机构3顶部,且所述双向伸缩机构4的两端均设置有动力输出端,且所述双向伸缩机构4的动力输出端分别连接后轮臂6与前轮臂5;如上所述,通过双向伸缩机构4带动前轮臂5与后轮臂6沿横向方向进行移动,其中,闭环时,双向伸缩机构4的动力输出端横向呈回缩运动,前轮臂5与后轮臂6相对横向移动从而使前轮臂5上的动力轮61与后轮臂6上的支撑轮51分离,开环时,双向伸缩机构4的动力输出端呈横向顶出运动,前轮臂5与后轮臂6相反横向移动,从而使前轮臂5的动力轮61与后轮臂6上的支撑轮51相互抵接贴合。
65.本实施中,所述横杆2的顶部设置有滑轨21,所述竖直伸缩机构3的底部设置有第一滑块32,所述所述滑轨21与第一滑块32相配合;如上所述,有效的通过第一滑块32外部可连接有第一驱动机构,第一驱动机构的动力输出端推动滑块,第一驱动机构可连接控制盒
1,根据实际情况,在控制盒1启动第一驱动机构后,第一驱动机构带动竖直伸缩机构3于横杆2顶部进行滑动。
66.本实施中,所述横杆2的底部设置有滑槽,所述控制盒1的顶部设置有第二滑块12,所述第二滑块12滑动设置于滑槽内部;如上所述,有效的通过第二滑块12外部可连接有第二驱动机构,第二驱动机构的动力输出端推动第二滑块12,第二驱动机构可连接控制盒1,根据实际情况,在控制盒1启动第二驱动机构后,第二驱动机构带动第二滑块12,从而达到控制盒1于横杆2的底部进行滑动。
67.结合以上所述,第一驱动机构与第二驱动机构均可采用气缸。
68.本实施中,所述动力轮61整体呈“凹”字形,且所述动力轮61卡接于线缆上;如上所述,便于动力轮61与线路卡接。
69.本实施中,所述控制盒1底部通过固定螺丝安设于机器人顶部;如上所述,使机器人与控制盒1连接更加稳固。
70.结合实施例二具有以下效果:
71.防脱轨功能:通过双向伸缩机构4带动后轮臂6与前轮臂5,从而使前轮臂5上的支撑轮51与后轮臂6上的动力轮61相抵接,对线缆构成闭合的环形,防止机器人存在脱轨坠落的风险,动力轮61设计成“凹”字形结构,即使误操作或高电磁场环境下传感器受到干扰误触发导致机器人误动作也始终有一组轮组悬挂在线缆上,故不存在脱轨的风险。
72.越障功能:由于动力轮61与支撑轮51相抵接闭合时,过线缆上的防震锤或接续管时,无需任何控制动作便可完成越障,且不会因障碍物导致轮子脱轨,减少了机器人越障程序配置时间。
73.实施例三
74.一种无辅助旁路越塔的架空输电线路机器人,包括有安设于机器人顶部的控制盒1与横杆2,所述控制盒1滑动设置于横杆2的底部,所述横杆2的顶部两端均滑动设置有竖直伸缩机构3,所述竖直伸缩机构3呈竖直方向设置于横杆2的顶部,所述竖直伸缩机构3的顶部设置有双向伸缩机构4,所述双向伸缩机构4的两端分别设置有前轮臂5与后轮臂6,所述后轮臂6的顶部设置有用于驱动的动力轮61,所述前轮臂5的顶部设置有支撑轮51,所述控制盒1内部设置有控制开关11,所述控制开关11分别连接竖直伸缩机构3与双向伸缩机构4,其中,控制开关11可通过传感器连接竖直伸缩机构3与双向伸缩机构4。
75.本实施中,所述动力轮61与支撑轮51位置对应;闭环时,所述支撑轮51与动力轮61相抵接,开环时,所述支撑轮51与动力轮61产生一定间距。
76.本实施中,所述前轮臂5的外部一侧滑动设置定位块52,所述定位块52外部套设有压紧轮53,所述压紧轮53呈横向设置于支撑轮51的底部;如上所述,有效的通过压紧轮53对动力轮61起到限位作用,动力轮61卡接于架空线上,压紧轮53设置于与动力轮61底部相对应的位置处,动力轮61与压紧轮53之间的间隙可穿设线缆,防止机器人脱落。
77.本实施中,所述前轮臂5的顶部两端对称设置有两个所述支撑轮51,所述后轮臂6的顶部两端对称设有两个所述动力轮61;如上所述,通过前轮臂5的顶部两端对称设置有支撑轮51,后轮臂6顶部两端对称设置有两个动力轮61,提高了机器人整体在安设于线缆上时的稳定性,防止侧翻脱落的情况出现。
78.本实施中,所述竖直伸缩机构3设置有两个,两个所述竖直伸缩机构3对称设置于
横杆2的顶部,所述竖直伸缩机构3的内部还设置有推杆31,所述推杆31的一端连接动力输出端,所述推杆31的另一端向上延伸并与所述双向伸缩机构4相连接。
79.本实施中,所述双向伸缩机构4呈横向设置于竖直伸缩机构3顶部,且所述双向伸缩机构4的两端均设置有动力输出端,且所述双向伸缩机构4的动力输出端分别连接后轮臂6与前轮臂5;如上所述,通过双向伸缩机构4带动前轮臂5与后轮臂6沿横向方向进行移动,其中,闭环时,双向伸缩机构4的动力输出端横向呈回缩运动,前轮臂5与后轮臂6相对横向移动从而使前轮臂5上的动力轮61与后轮臂6上的支撑轮51分离,开环时,双向伸缩机构4的动力输出端呈横向顶出运动,前轮臂5与后轮臂6相反横向移动,从而使前轮臂5的动力轮61与后轮臂6上的支撑轮51相互抵接贴合。
80.本实施中,所述横杆2的顶部设置有滑轨21,所述竖直伸缩机构3的底部设置有第一滑块32,所述所述滑轨21与第一滑块32相配合;如上所述,有效的通过第一滑块32外部可连接有第一驱动机构,第一驱动机构的动力输出端推动滑块,第一驱动机构可连接控制盒1,根据实际情况,在控制盒1启动第一驱动机构后,第一驱动机构带动竖直伸缩机构3于横杆2顶部进行滑动。
81.本实施中,所述横杆2的底部设置有滑槽,所述控制盒1的顶部设置有第二滑块12,所述第二滑块12滑动设置于滑槽内部;如上所述,有效的通过第二滑块12外部可连接有第二驱动机构,第二驱动机构的动力输出端推动第二滑块12,第二驱动机构可连接控制盒1,根据实际情况,在控制盒1启动第二驱动机构后,第二驱动机构带动第二滑块12,从而达到控制盒1于横杆2的底部进行滑动。
82.本实施中,所述动力轮61整体呈“凹”字形,且所述动力轮61卡接于线缆上;如上所述,便于动力轮61与线路卡接。
83.本实施中,所述控制盒1底部通过固定螺丝安设于机器人顶部;如上所述,使机器人与控制盒1连接更加稳固。
84.结合实施例二,具有爬坡功能:通过压紧轮53沿前轮臂5向上移动,使压紧轮53与动力轮61之间的间隙变小,从而压紧线缆,为动力轮61提供额外的负载,从而增大摩擦力,从而使机器人具有一定的爬坡能力,满足山区杆塔线路的使用。
85.综上实施例一至实施例三所述,本发明有效的达到无需搭建辅助旁路,实现跨越直线塔或小型耐张塔的功能的问题。
86.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变形,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。