1.本发明涉及一种故障穿越控制方法,具体涉及一种多端口能量路由器故障穿越控制方法。
背景技术:
2.基于电力电子技术的多端口能量路由器,可以实现多个交流或直流电网互联,提高输电效率,同时实现潮流的灵活控制,节省无功补偿装置,实现交直流多种电压等级的端口输出,方便储能、光伏、充电桩等设备的直流接入。
3.多端口能量路由器与交流侧端口连接处可采用mmc拓扑的换流器,mmc拓扑换流器能够实现交流到直流的相互转换,通过直流母线的连接可以实现各个端口之间能量的交换。对于端口侧为光伏、储能及充电桩的直流电网可通过电力电子变压器转换成设备适配的电压。
4.对于无隔离变压器的多端口能量路由器,当某一个交流侧端口发生不对称接地故障时,产生的负序和零序分量会传递到mmc拓扑的直流侧和非故障交流端口,导致能量路由器直流母线的对地电压和非故障端口的交流对地电压升高。持续的故障会使得多端口能量路由器的模块电压升高,影响装置的运行性能,并可能导致模块过压闭锁。
5.cn 110858754 a的发明专利提出了一种mmc型能量路由器的两级控制方法及系统,其利用能量路由器中各mmc子模块的脉冲信号和各dab模块的脉冲信号对能量路由器进行两级控制,从传统的输入级、中间级和输出级的三级控转变为三相mmc和dab并联系统的两级协同控制,简化了控制系统。
6.cn 108418236 a的发明专利公开了一种柔性多状态开关交流故障穿越方法,其通过向故障供区内与柔性多状态开关相连馈线的出线断路器下发断开指令,换流器从有源控制运行状态切换为无源控制运行状态,对区内故障和区外故障分别进行处理,使得无变压器的柔性多状态开关具有交流故障穿越能力。
7.cn 110763950 a公开了一种柔性多状态开关单相接地故障穿越控制方法,利用柔性多状态开关换流阀的控制阻断零序电流,保证柔性多状态开关的故障穿越和电网的安全运行。
8.当无隔离变压器的多端口能量路由器的交流侧端口发生不对称接地故障时,故障产生的负序和零序分量会传递到mmc拓扑的直流侧和非故障交流端口,导致直流线路的对地电压和非故障端口的交流对地电压升高,影响设备的使用寿命,更严重可能会损坏系统内的设备,导致多端口能量路由器无法正常运行。现有的技术方案中,对于多端口能量路由器或柔性多状态开关交流故障端口的零序电压传递到非故障端口,采用断路器或换流阀的开断控制来阻断零序电流,这通常导致此端口能量传输受限。而对于抑制非故障端口零序电压,在不影响装置持续运行的基础上提高装置的故障穿越能力并未进行分析研究。
技术实现要素:
9.本发明的目的在于克服上述现有技术的缺点,提供了一种多端口能量路由器故障穿越控制方法,该方法能够抑制交流不对称故障下负序分量和零序分量,改善故障状态下多端口能量路由器的运行性能,提升多端口能量路由器的故障穿越能力。
10.为达到上述目的,本发明所述的多端口能量路由器故障穿越控制方法包括:
11.通过零序分量抑制策略与采用正负序解耦双环控制结构的内环电流控制器相结合,对多端口能量路由器交流端口交流不对称故障时多端口能量路由器的交流端口交流三相电压的零序分量及负序分量进行抑制。
12.具体包括以下步骤:
13.检测多端口能量路由器的交流端口交流三相电压,再根据所述多端口能量路由器的交流端口交流三相电压,判断多端口能量路由器的交流端口是否发生交流故障;
14.当所述多端口能量路由器的交流端口发生交流故障时,则通过零序分量抑制策略及基于正负序解耦双环控制结构的内环电流控制器相结合,对多端口能量路由器交流端口交流三相电压的零序分量及负序分量进行抑制。
15.当所述多端口能量路由器的交流端口交流三相电压的正序分量小于0.85pu时,则认为所述多端口能量路由器的交流端口发生交流故障。
16.通过零序分量抑制策略及基于正负序解耦双环控制结构的内环电流控制器相结合,对多端口能量路由器交流端口交流三相电压的零序分量及负序分量进行抑制的具体过程为:
17.计算桥臂电压参考电压的零序分量u
0ref
、内环电流控制器输出的桥臂差模参考电压u
diffref
及三相坐标系下的桥臂共模参考电压u
comref
;
18.根据桥臂电压参考电压的零序分量u
0ref
、内环电流控制器输出的桥臂差模参考电压u
diffref
及三相坐标系下的桥臂共模参考电压u
comref
计算得到最终的桥臂参考电压u
ref
,根据最终的桥臂参考电压u
ref
进行调制生成触发脉冲信号,对模块化多电平换流器内的子模块进行控制。
19.计算桥臂电压参考电压的零序分量u
0ref
的具体过程为:
20.对多端口能量路由器交流端口的三相交流电压u
sabc
及三相交流电流i
sabc
进行clark变换,得到αβ0静止坐标系下的电压u
sαβ0
及电流i
sαβ0
;
21.将电流i
sαβ0
的零轴分量i
s0
通过比例谐振控制,得到u
0ref1
,将u
0ref1
与电压u
sαβ0
的零轴分量u
s0
相加,得到桥臂电压参考电压的零序分量u
0ref
。
22.桥臂电压参考电压的零序分量u
0ref
为:
23.u
0ref1
=(0-i
s0
)*g
pr
[0024][0025]u0ref
=u
0ref1
u
s0
[0026]
其中,g
pr
为比例谐振控制器的传递函数,k
p
及kr为比例系数,ωc为截止角频率,ωr为谐振角频率,ω0为u
sabc
的额定角频率,s为拉普拉斯变换的复变量。
[0027]
计算内环电流控制器输出的桥臂差模参考电压u
diffref
的具体过程为:
[0028]
分别对多端口能量路由器交流端口的交流电压u
sαβ
及交流电流i
sαβ
进行正向同步
旋转坐标变换及反向同步旋转坐标变换,得到dq轴分量u
sd
、u
sq
、i
sd
及i
sq
和d-1
q-1
轴分量u
sd-、u
sq-、i
sd-及i
sq-;
[0029]
分别对电流的正序分量i
sdq
及负序分量i
sdq-进行pi控制,得到桥臂差模参考电压正序分量u
diffrefdq
及负序分量u
diffrefdq-;
[0030]
分别将桥臂差模参考电压正序分量u
diffrefdq
及负序分量u
diffrefdq-进行park反变换,得到三相坐标系下的正序电压及负序电压,再将三相坐标系下的正序电压及负序电压进行叠加,得到内环电流控制器输出的桥臂差模参考电压u
diffref
。
[0031]
内环电流控制器输出的桥臂差模参考电压u
diffref
为:
[0032][0033][0034][0035]
其中,t
dq-abc
(θ)为从dq旋转坐标系到abc三相静止坐标系的变换矩阵,t
dq-abc
(-θ)为从d-1
q-1
旋转坐标系到abc三相静止坐标系的变换矩阵。
[0036]
计算三相坐标系下的桥臂共模参考电压u
comref
的具体过程为:
[0037]
将模块化多电平换流器内部的三相环流i
cirabc
变换为d-2
q-2
旋转坐标系下的环流i
cirdq
,再对环流i
cirdq
进行pi控制,得到桥臂共模参考电压u
comrefdq
;
[0038]
将所述桥臂共模参考电压u
comrefdq
进行park反变换,得到三相坐标系下的桥臂共模参考电压u
comref
。
[0039]
三相坐标系下的桥臂共模参考电压u
comref
为:
[0040][0041]ucomrefd
=-2ωl0i
cirq-(0-i
cird
)g
pi
[0042]ucomrefq
=2ωl0i
cird-(0-i
cirq
)g
pi
[0043][0044]
其中,t
abc-dq
(-2θ)为从abc三相静止坐标系到d-2
q-2
旋转坐标系的变换矩阵,t
dq-abc
(-2θ)为从d-2
q-2
旋转坐标系到abc三相静止坐标系的变换矩阵,i
cirabc
为内部三相环流,θ为u
sabc
的相角,ω为u
sabc
的角频率,l0为桥臂电抗器电感,g
pi
为pi控制器的传递函数。
[0045]
本发明具有以下有益效果:
[0046]
本发明所述的多端口能量路由器故障穿越控制方法在具体操作时,通过零序分量抑制策略实现对交流不对称故障下零序电压的抑制,并且与采用正负序解耦双环控制结构的内环电流控制器相结合,对多端口能量路由器交流端口交流不对称故障时的零序分量和负序分量进行抑制,提高多端口能量路由器的故障穿越能力,改善故障状态下多端口能量路由器的运行性能。
附图说明
[0047]
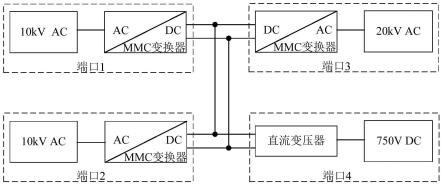
图1为四端口能量路由器的结构图;
[0048]
图2为本发明的控制流程图;
[0049]
图3为零序分量的抑制框图;
[0050]
图4为负序分量的抑制框图;
[0051]
图5为内部换流的抑制框图
[0052]
图6a为仿真实验中端口3交流单相接地故障后的直流电压波形图;
[0053]
图6b为仿真实验中端口3交流单相接地故障后的10kv交流电压波形图;
[0054]
图6c为仿真实验中20kv交流电压波形图;
[0055]
图7为多端口能量路由器交流故障下mmc的控制框图。
具体实施方式
[0056]
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,不是全部的实施例,而并非要限制本发明公开的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要的混淆本发明公开的概念。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
[0057]
在附图中示出了根据本发明公开实施例的结构示意图。这些图并非是按比例绘制的,其中为了清楚表达的目的,放大了某些细节,并且可能省略了某些细节。图中所示出的各种区域、层的形状及它们之间的相对大小、位置关系仅是示例性的,实际中可能由于制造公差或技术限制而有所偏差,并且本领域技术人员根据实际所需可以另外设计具有不同形状、大小、相对位置的区域/层。
[0058]
实施例一
[0059]
参考图1,本发明所述的多端口能量路由器故障穿越控制方法具体包括以下步骤:
[0060]
检测多端口能量路由器的交流端口交流三相电压,并根据所述多端口能量路由器的交流端口交流三相电压,判断多端口能量路由器的交流端口是否发生交流故障,其中,当所述多端口能量路由器的交流端口交流三相电压的正序分量小于0.85pu时,则认为所述多端口能量路由器的交流端口发生交流故障。
[0061]
当所述多端口能量路由器的交流端口发生交流故障时,则通过零序分量抑制策略及基于正负序解耦双环控制结构的内环电流控制器,对多端口能量路由器交流端口交流三相电压的零序分量及负序分量进行抑制。
[0062]
具体的,多端口能量路由器交流端口交流三相电压的零序分量进行抑制的具体过程为:
[0063]
对多端口能量路由器交流端口的三相交流电压u
sabc
及三相交流电流i
sabc
进行clark变换,得到αβ0静止坐标系下的电压u
sαβ0
及电流i
sαβ0
,其中,
[0064][0065][0066]
其中,u
sα
、u
sβ
及u
s0
分别为电压u
sαβ0
的α轴、β轴及零轴的分量,i
sα
、i
sβ
及i
s0
分别为电流i
sαβ0
的α轴、β轴及零轴的分量。
[0067]
将所述零轴的分量i
s0
通过比例谐振控制后,得到u
0ref1
,其中,零序电流参考值取零,实现对零序分量的抑制;将u
0ref1
与交流电压零序分量u
s0
相加,得到桥臂电压参考电压的零序分量u
0ref
,控制框图如图2所示,具体计算过程为:
[0068]u0ref1
=(0-i
s0
)*g
pr
[0069][0070]u0ref
=u
0ref1
u
s0
[0071]
其中,g
pr
为比例谐振控制器的传递函数,k
p
及kr为比例系数,ωc为截止角频率,ωr为谐振角频率,本实施例中ωc为5hz,ωr为50hz,ω0为u
sabc
的额定角频率,s为拉普拉斯变换的复变量。
[0072]
所述基于正负序解耦电流控制结构的内环控制器为:
[0073]
分别对多端口能量路由器交流端口的交流电压u
sαβ
及交流电流i
sαβ
进行正向同步旋转坐标变换及反向同步旋转坐标变换,得到dq轴分量u
sd
、u
sq
、i
sd
及i
sq
和d-1
q-1
轴分量u
sd-、u
sq-、i
sd-及i
sq-,具体计算过程为:
[0074]
[0075][0076][0077][0078]
分别对电流的正序分量i
sdq
及负序分量i
sdq-进行pi控制,得到桥臂差模参考电压正序分量u
diffrefdq
及负序分量u
diffrefdq-,其中,正序电流参考值由外环功率控制器输出,负序电流参考值取零,实现对负序分量的抑制,控制框图如图3所示,具体计算过程为:
[0079][0080][0081][0082][0083]
其中,i
sdref
为d轴正序电流参考值,i
sqref
为q轴正序电流参考值,g
pi
=k
p
ki/s,g
pi
为pi控制的传递函数,控制系数根据实际情况调节。
[0084]
分别将桥臂差模参考电压正序分量u
diffrefdq
及负序分量u
diffrefdq-进行park反变换,得到三相坐标系下的正序电压及负序电压,再将三相坐标系下的正序电压及负序电压进行叠加,得到桥臂差模参考电压u
diffref
,具体计算过程为:
[0085][0086][0087][0088]
其中,t
dq-abc
(θ)为从dq旋转坐标系到abc三相静止坐标系的变换矩阵,t
dq-abc
(-θ)为从d-1
q-1
旋转坐标系到abc三相静止坐标系的变换矩阵。
[0089]
将模块化多电平换流器内部的三相环流i
cirabc
变换为d-2
q-2
旋转坐标系下的环流i
cirdq
,再对环流i
cirdq
进行pi控制,得到桥臂共模参考电压u
comrefdq
,其中,环流参考值取零,实现对内部环流2次谐波分量的抑制,控制框图如图4所示,将所述桥臂共模参考电压u
comrefdq
进行park反变换,得到三相坐标系下的桥臂共模参考电压u
comref
,具体计算过程为:
[0090][0091]ucomrefd
=-2ωl0i
cirq-(0-i
cird
)g
pi
[0092]ucomrefq
=2ωl0i
cird-(0-i
cirq
)g
pi
[0093][0094]
其中,t
abc-dq
(-2θ)为从abc三相静止坐标系到d-2
q-2
旋转坐标系的变换矩阵,t
dq-abc
(-2θ)为从d-2
q-2
旋转坐标系到abc三相静止坐标系的变换矩阵,i
cirabc
为内部三相环流,θ为u
sabc
的相角,ω为u
sabc
的角频率,l0为桥臂电抗器电感,g
pi
为pi控制器的传递函数。
[0095]
根据桥臂电压参考电压零序分量u
0ref
、内环电流控制器输出的桥臂差模参考电压u
diffref
及桥臂共模参考电压u
comref
计算得到最终的桥臂参考电压u
ref
,根据最终的桥臂参考电压u
ref
进行调制生成触发脉冲信号,对模块化多电平换流器内的子模块进行控制,其中,具体的计算过程为:
[0096]upref
=u
comref-u
diffref-u
0ref
[0097]unref
=u
comref
u
diffref
u
0ref
[0098]
其中,u
pref
为上桥臂的参考电压,u
nref
为下桥臂的参考电压。
[0099]
仿真实验
[0100]
本实验中,四端口能量路由器如图5所示,端口1和端口2均为交流电压10kv,端口3为交流电压20kv,端口4为直流750v,仿真过程中,端口3在6s时出现交流单相接地故障。
[0101]
图6a为端口3交流单相接地故障后的直流电压波形图,u
dc
为正负极之间的电压,e
dcp
为正极对地电压,e
dcn
为负极对地电压;图6b为端口3交流单相接地故障后的10kv交流电压波形图;图6c为20kv交流电压波形图。通过仿真波形可以看出,在没有加入零序电压抑制策略之前,当端口3出现交流单相接地故障时,直流电压及10kv侧交流电压都会有明显的过电压,加入零序电压抑制策略之后,该过电压得到有效的抑制。
[0102]
实施例二
[0103]
一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述多端口能量路由器故障穿越控制方法的步骤,其中,所述存储器可能包含内存,例如高速随机存储器,也可能还
包括非易失性存储器,例如,至少一个磁盘存储器等;处理器、网络接口、存储器通过内部总线互相连接,该内部总线可以是工业标准体系结构总线、外设部件互连标准总线、扩展工业标准结构总线等,总线可以分为地址总线、数据总线、控制总线等。存储器用于存放程序,具体地,程序可以包括程序代码、所述程序代码包括计算机操作指令。存储器可以包括内存和非易失性存储器,并向处理器提供指令和数据。
[0104]
实施例三
[0105]
一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现所述多端口能量路由器故障穿越控制方法的步骤,具体地,所述计算机可读存储介质包括但不限于例如易失性存储器和/或非易失性存储器。所述易失性存储器可以包括随机存储存储器(ram)和/或高速缓冲存储器(cache)等。所述非易失性存储器可以包括只读存储器(rom)、硬盘、闪存、光盘、磁盘等。
[0106]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0107]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0108]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0109]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0110]
最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。