技术特征:
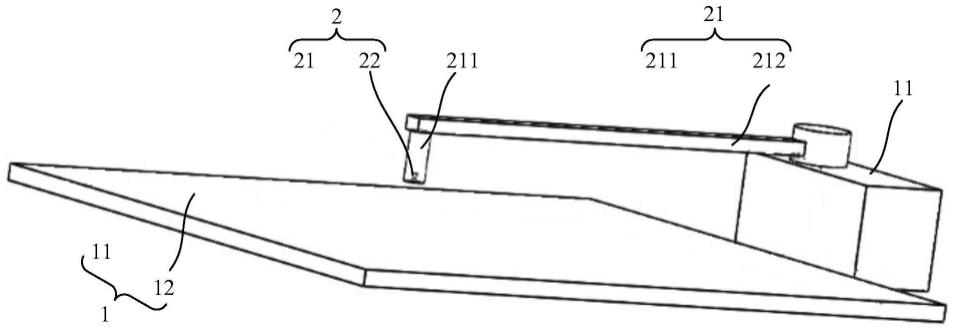
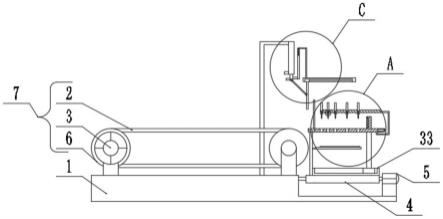
1.一种机械臂,其特征在于,包括:机械臂本体,包括动作部及连接于动作部末端的执行部,所述执行部用于与目标物体互动;摄像头,设置于所述动作部的末端或所述执行部上,用于跟随所述执行部运动到目标物体处,并采集目标信息。2.根据权利要求1所述的机械臂,其特征在于,所述执行部为取子部,所述摄像头设置在所述取子部上。3.根据权利要求2所述的机械臂,其特征在于,所述摄像头设置于所述取子部朝向目标物体一侧的端面上。4.根据权利要求3所述的机械臂,其特征在于,所述摄像头设置于所述端面的中部位置。5.根据权利要求3所述的机械臂,其特征在于,所述摄像头设置于所述端面的周边位置。6.根据权利要求2所述的机械臂,其特征在于,所述摄像头设置于所述取子部的侧壁。7.根据权利要求6所述的机械臂,其特征在于,所述摄像头的镜片所在平面与目标物体所在平面呈一锐角角度设置,以使所述摄像头朝向目标物体。8.根据权利要求1所述的机械臂,其特征在于,所述机械臂本体还包括动作部,所述摄像头设置在所述动作部的末端,所述动作部末端连接所述执行部。9.根据权利要求1~8中任一项所述的机械臂,其特征在于,还包括控制器,所述机械臂本体和所述摄像头均电联接于所述控制器,所述控制器用于根据所述摄像头采集到的所述目标信息控制所述机械臂本体。10.一种对弈机器人,其特征在于,包括:机器人本体;权利要求1~9中任一项所述的机械臂,所述机械臂安装于所述机器人本体上。
技术总结
本申请实施例公开了一种机械臂及对弈机器人,涉及机器人技术领域,解决了相关技术中对弈机器人对棋子类别和位置识别准确性低的问题。该机械臂,包括机械臂本体和摄像头,机械臂本体包括执行部,执行部用于与目标物体互动;摄像头设置于机械臂本体上,用于跟随执行部运动到目标物体处,并采集目标信息。本申请的机械臂用于对弈机器人挪动棋子。的机械臂用于对弈机器人挪动棋子。的机械臂用于对弈机器人挪动棋子。
技术研发人员:李明军 唐明勇 解磊磊
受保护的技术使用者:北京市商汤科技开发有限公司
技术研发日:2022.03.29
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。