用于对容器进行成像的系统
1.相关申请的交叉引用
2.本技术要求2021年3月10日提交的美国临时申请序列号63/159,269的优先权,该申请通过引用并入本文。
技术领域
3.当前描述的是一种获得血液培养瓶的单个图像的设备,从该图像可以获得诸如标签信息和填充水平的信息。
背景技术:
4.通常使用血液培养瓶确定患者体液尤其是血液中的诸如细菌的生物活性剂的存在。将少量血液通过封闭的橡胶隔膜注入含有培养基的无菌瓶中,然后将瓶子在约35℃下孵育并监测微生物生长。通过作为微生物生长的指示的血液培养物随时间的变化来检测微生物生长。通常,监测诸如培养瓶顶部空间中二氧化碳或氧气浓度或ph变化的参数随时间的变化,这些变化指示微生物生长。
5.由于了解患者是否患有细菌感染至关重要,因此医院和实验室具有可以同时处理许多血液培养瓶的自动化设备。这样的设备的一个示例是bdbactec
tm
系统,它由bd公司(becton,dickinson and co.)制造和销售。 berndt等人的美国专利第5,817,508号描述了现有技术的血液培养设备,并通过引用并入本文。在美国专利第5,516,692号(“小型血液培养设备(compactblood culture apparatus)”)和美国专利第5,498,543号(“超小型血液培养设备(sub-compact blood culture apparatus)”)中提供了血液培养设备的附加描述,这两篇专利通过引用并入本文。
6.确保正确地确定是否存在血流感染(bsi)是至关重要的。如果bsi未被检测到,则患者及其护理人员将面临风险。众所周知,用血样填充血液培养瓶过满可能导致假阳性。众所周知,用血样填充血液培养瓶不足可能导致假阴性。这是因为从患者身上取出的样本具有一定但未知浓度的细菌(如果细菌根本就存在的话)。因此,在填充不足的情况下,与培养瓶已充满目标样本量的情况相比,在零时间时血液培养瓶中存在的细菌计数更低。随之而来的是,在填充过满的情况下,与培养瓶已充满目标样本(例如血液)量的情况相比,在零时间时血液培养瓶中存在的细菌计数更高。如果瓶子填充不足或填充过满,则算法可以应用于二氧化碳或氧气浓度或ph值的测量变化,以调整填充不足或填充过满。如果填充不足或填充过满超过特定规格,则血液培养瓶被丢弃。这在美国专利第9,365,814号中有所描述,该专利发布于2016 年6月14日并通过引用并入本文。
7.因此,当在处理大量血液培养瓶的实验室环境中处理血液培养瓶时,需要能够准确地监测每个瓶子的填充情况。还收集有关血液培养物的其他信息,诸如标签信息。因此,继续寻求可以准确地从血液培养瓶获得填充信息和标签信息的方法和设备。
技术实现要素:
8.在血液培养仪器中,确定已接种到样品容器(例如血液培养瓶)中的血样量是有益的。在血液培养的情况下,样品量与获得随后将被培养、生长和检测的细菌菌落的可能性成正比。一般来说,对于用户(即操作员或技术人员或抽血者)来说,确保采集的血液量尽可能接近预期的填充水平是有利的。培养瓶中样品填充不足可能导致无法收集菌落形成单位,因此无法为患者获得正确的结果。
9.本文描述了准确且精确地确定接种到容器中的样品体积的系统、设备、控制和方法。本文描述了一种设备,其通过获得接种有样品的容器的图像来确定接种到容器(例如,血液培养瓶)中的样品(例如,血液)的体积。这样的方法有助于自动化,因为操作员不需要目视检查每个瓶子。设备包括:机器人输送臂,机器人输送臂包括带有夹具的末端执行器;用于接收带有标签的柱形样品容器的平台,样品容器通过机器人输送臂放置在平台上;以及相机,其被定位成当柱形样品容器放置在平台上时获得柱形样品容器的图像。相机经配置以获得柱形样品容器所携带的标签的一张或多张图像。系统根据由相机获得的标签的一张或多张图像,构建标签的二维图像。在获得标签的图像之后,柱形样品容器通过机器人输送臂从系统中移除。
附图说明
10.在结合附图考虑以下详细描述后,上述和其他目的和优点将变得显而易见,在附图中相同的附图标记自始至终指代相同的部件,其中:
11.图1a是用于获得血液培养瓶的图像的系统的示意性侧视图;
12.图1b是图1a所示的系统的示意性俯视图;
13.图2是本文所述的系统的一个实施例的示意图;
14.图3是本文所述的系统的替代实施例的示意图;
15.图4a是放置在本文所述的系统中以获得其图像的血液培养瓶;
16.图4b是图4a所示的血液培养瓶的图像,使用如图2所示的系统获得该图像;
17.图4c是图4b所示的图像的极坐标变换;
18.图5a-图5c是amm配置的替代配置;
19.图6是本文所述的系统的替代实施例的示意图;和
20.图7是本文所述的系统的替代实施例的示意图。
21.图8a-图8c是根据本文所述的一个实施例的圆锥形镜成像模块的不同透视图;
22.图9a和图9b是图8a-图8c所示的支架的仰视图。
23.图10a-图10d是根据本文所述的第二实施例的圆锥形镜成像模块的透视图和侧视图。
24.图11示出了带有用于从圆锥形镜成像位置移除样品容器的活板门(trapdoor)的圆锥形镜成像模块的替代实施例。
25.图12示出了用于本文所述的系统的替代成像设备,其使用扫描仪和旋转平台来获得标签的图像以及机器人夹持器来竖直放置瓶子和水平移除瓶子。
26.图13是图12的设备的底部透视分解图。
27.图14a-图14d是本文所述的设备的替代实施例的透视图,其中当已获得柱形样品
瓶上的标签的图像时,从平台下方操作闸门(gate)以分配诸如图 13所示的柱形样品容器。
28.图15是使用图11所示的圆锥形镜面化托盘的图12的成像设备的示意性透视图。
29.图16是使用多个相机来获得标签的离散部分的图像的图15的成像设备的示意性透视图。
30.图17是不带有活板门的图15的成像设备的示意性透视图。
31.图18是不带有活板门的图12的成像设备的示意性透视图。
32.图19是带有用于夹住样品容器的替代配置的图18的成像设备的示意性透视图。
33.图20是用于在成像后从成像设备中移除样品容器的滑槽的示意性透视图。
34.图21是本文所述的方法的流程图。
具体实施方式
35.参考附图详细描述了本公开的方面,其中相似的附图标记表示相似或相同的元件。应当理解,所公开的实施例仅仅是本公开的示例,其可以以各种形式体现。没有详细描述众所周知的功能或构造以避免不必要的细节混淆本公开。因此,本文公开的具体结构和功能细节不应被解释为限制性的,而仅作为权利要求的基础和作为教导本领域技术人员以几乎任何适当详细结构不同地使用本公开的代表性基础。
36.本文描述了一种用于获得血液培养瓶的图像的成像系统,该图像可用于获得诸如标签信息、填充水平等的信息。在一个特定方面,本文描述了一种设备,该设备可以获得血液培养瓶的整个柱形主体的单幅图像。从该图像中,可以获得诸如瓶子上的完整标签信息和瓶子中的液体高度水平的信息。
37.参考图1a,现有技术的系统100获得柱形/圆柱形主体的图像,该柱形主体示为血液培养瓶110。血液培养瓶110具有在成像设备100的水平平面上跨越360
°
的弯曲表面。这样的系统可以以两种方式之一获得血液培养瓶的整个柱形主体的完整图像。
38.镜头120和相机130的简单成像系统获得瓶子110的图像。尽管未按比例示出,但图1示出了系统与瓶子之间的距离并不比瓶子110的长度大很多。瓶子110围绕其竖直轴线115旋转。随着瓶子110围绕其轴线旋转,获得一系列图像。虽然图像的数量可能会有所不同,但瓶子完整旋转一个周期的一系列图像可能有约24到48帧或更多帧。每个图像帧被传送到图像处理设备以将每帧图像的中心部分拼接在一起。由此,恢复瓶子的整个柱形主体的完整图像。图1b是图1a的系统的俯视图。瓶子110放置在其上用于旋转的旋转平台140在图1b中示出。在美国专利第10,395,357号中描述了用于在旋转平台上获得血液培养瓶的图像的系统,该专利于2019年8月27日授权并通过引用并入本文。图像被获得以检测容器中泡沫的存在。
39.在图1a和图1b所示的方法的替代方法中,镜头/相机组件的多个实例可以围绕柱形瓶子定位。镜头/相机组件的数量可以改变。例如,为了获得柱形瓶子的完整图像,十二个、十六个或甚至更多的镜头/相机组件可以环绕瓶子定位。瓶子定位于环形成像区的中心,该环形成像区由环绕该区的镜头/相机组件限定。每个镜头/相机组件获得整个瓶子图像的离散帧。然后,该组件将帧传送到图像处理模块,该图像处理模块使用每个图像帧的中心部分将图像拼接在一起。
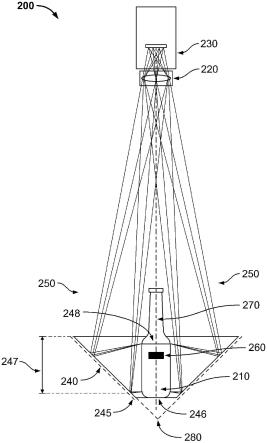
40.参考图2,系统200与图1a和图1b所示的现有技术系统不同,不同之处在于该系统
不具有或不需要旋转平台或多个镜头/相机组件来获得诸如血液培养瓶的柱形物体的360
°
图像。该系统与由镜头220和相机230组成的简单成像系统协作部署了本文所称的辅助镜模块(amm)。
41.再次参考图2,重要的是注意瓶子210不需要是直立的(即,如图2所示,瓶子210的底部靠近外推顶点280以测量瓶子填充量或读取标签260)。瓶子 210可以侧身定位以供成像。而且,瓶子210可以倒置定位,使得瓶子210的颈部270靠近amm的顶点。在成像期间瓶子的取向在一定程度上取决于所寻求的信息。如果目标是从图像中获得标签信息和瓶子的填充水平两者,则需要将瓶子直立定位。如果所寻求的唯一信息是标签图像,则瓶子可以侧身、倒置等定位。顶点280是从amm 240的锥形侧外推的。如图3所示,瓶子 210可以被定位成使得其颈部270可以靠近amm的顶点。系统200部署了提供三维(3d)光学路径折叠的amm 240。amm模块被配置为如光线250所示地反射瓶子210的镜面化圆锥形结构。光线250指示瓶子在amm中的反射如何被镜头/相机220/230组件接收。瓶子210放置在amm的中心,并由相机通过折叠路径250成像。通过以这种特定方式工作,在单个图像帧中捕获整个瓶子的图像。由相机传感器接收到的瓶子210的图像是由于amm传输的瓶子反射的性质而变形的图像。然而,不需要图像拼接,尽管需要图像处理才能从amm反射的图像中获得瓶子的真实图像。不需要图像拼接和不需要瓶子旋转的事实是优于获得血液培养瓶图像的现有技术系统的优点。
42.参考图2,amm 240是一种具有漏斗形状或圆锥形状的特殊反射镜,其由几个参数定义。对于图2所示的实施例,定义在外推顶点280处的锥角为 90
°
。amm在amm的底部245中具有一个小的圆形开口246,其直径略大于瓶子210的直径。amm的高度247略高于瓶子210的主体部分。也就是说,在图2所示的实施例中,瓶子210的颈部270的大部分延伸到amm上方。如光线250所示,amm以3d方式提供瓶子210的反射图像的路径折叠,从定位于amm内的瓶子部分上的每个点到成像相机,形成点到点图像。因此,在一帧中获得整个瓶子210的图像。
43.考虑了常规的镜子材料(即,具有反射背衬的玻璃)。然而,球面镜的替代材料选择是工程塑料,诸如abs、pc、尼龙或这类物质的共混物、抛光铝或钢。可以使用铝、铍、铬、铜、金、钼、镍、铂、铑、钨和最常见的银的薄层对这些材料中的任何一种进行涂布以增强反射率。
44.参考图3,该系统与图2的系统相同,不同之处在于瓶子210的颈部270 通过amm的开口246插入。因为瓶子210要由相关联的保持机构支撑,所以瓶子210可以如图所示定位,其为竖直取向。出于确定瓶子的填充水平的目的,优选使瓶子210保持成自底向上(bottom down)竖直取向。虽然在瓶子保持成水平位置的情况下amm仍会提供瓶子的图像,但是对于水平感测来说,如果瓶子处于竖直取向,则测量结果更精确。
45.在一个实施例中,瓶子210配备有填充线248(图2)。填充线248用作从图像中确定瓶子是精确填充、还是填充过满或是填充不足的参考。在一个实施例中,填充线可以被提供在标签上。
46.本文所述的amm提供了优于获得培养瓶图像的其他系统的若干优点。如上所提到,无需移动(即旋转)瓶子。对于水平感测,如果瓶子保持静止以供成像是有利的。此外,只需要一个镜头/相机组件,降低了系统的成本和复杂性。如上所提到,只需要一帧即可获得整个瓶子的图像,降低了图像处理复杂性。具体地,与将标签的多个离散图像拼接在一起以获
得未失真(即“平放的”)标签的图像相比,获得标签的单个图像并修复由瓶子的曲率引起的图像失真更为不复杂。
47.图4a是其上带有标签360的瓶子310的图像。图4b示出了放置在amm 340中的瓶子310的图像311。amm 340是如图2和图3所示的镜面化圆锥形容器。瓶子310被定位成使得瓶子的底部靠近由amm 340限定的圆锥形形状的顶点。图4b所示的变形图像311具有像素密度(或分辨率)高于内分区区域的外分区区域。控制或平衡最终图像上的感兴趣区域(roi)的一种方式是在颈部靠近图3所示的amm的顶点的情况下拍摄瓶子的图像。当颈部以这种方式从amm延伸时,可以由机器人(未示出)保持颈部。由于机器人定位于amm远离镜头/相机组件的一侧,因此机器人位于从amm到镜头/ 相机组件的光学路径之外。
48.图4c是图4b所示图像的极坐标变换。sibiryakov等人的美国专利第 7,961,982号中描述了使用对数极坐标变换由圆形图像形成矩形图像的技术,该专利通过引用并入本文。合适的极坐标变换方程的一个示例是:
[0049][0050][0051]
其中r是到平面中原点的距离。这样的技术对于本领域技术人员来说是众所周知的并且在本文中没有详细描述。
[0052]
如上所提到,以本文所述的方式获得完整标签的图像是有利的,因为它在单个数据集中提供关于标签的所有数据。完整标签图像变形地形成在用于图像处理的环形区域中,如图4b所示。图4c示出了在应用极坐标变换之后的图4b中标签的图像。因为处理图像信息所需的所有数据都是在单帧中获得的,所以数据采集较快。如上所提到,不需要旋转瓶子或成像设备来获得单个标签的多个图像。因为在成像期间不需要移动瓶子,所以不存在与来自振动(这可能会导致瓶子沿y轴移动)的机械噪声相关联的成像误差。还避免了可能由轴向跳动(即摆动)引起的成像误差。如果瓶子在两个图像之间沿径向方向移动,则也可能导致成像误差,这可能造成两个图像之间的标签图像尺寸变化。此外,获得标签的单个图像允许获得贴得不好的标签(即歪的标签、起皱的标签等)的更准确图像。
[0053]
参考图5a-图5c,示出了amm类型的一些变型。这些amm不提供完整瓶子成像。相反,每个amm都支持在单帧中捕获标签的更多部分的扩大视野,这些更多部分可以通过使用图1a的amm而被捕获在单个帧中。例如,使用图5a-图5c的amm在单个图像帧中获得的标签的量是使用不具有图 5a-图5c所示修改的amm获得的标签的量的约两倍。在图5a-图5c所示的 amm中,视野大约加倍。图5a示出了具有两对镜子540a和540b的amm,每对镜子相对于瓶子轴线515的水平线成45
°
角。从瓶子(瓶子未示出)到镜头/相机组件(镜头/相机组件未示出)的光学路径由光线550示出。图5b示出了图5a所示的amm的变型,其中外镜子对540a'相对于瓶子轴线515以37
°
角定位。由光线550表征的光学路径示出了比图5a所示的amm宽的视野。
[0054]
图5c示出了图5a和图5b所示的amm的另一个变型,其中外镜子对 540a'相对于瓶子轴线515以35
°
角定位。由光线550表征的光学路径示出了比图5a和图5b所示的amm宽的视野。
[0055]
用于获得瓶子标签的“平放的”图像的其他技术是已知的。使用标准成像装置诸如照相电话或扫描仪的技术是众所周知的,并且对这样的技术的一种描述在slatcher,
steve,“如何创建酒瓶标签的平放的矩形图像(how tocreate flat rectangular images of wine bottle labels)”(2018年2月21日) wineous.co.uk/wp/archives/11397中进行了描述。
[0056]
图6示出了图2和图3所示的amm的变型。图6所示的系统600具有镜头/相机组件620/630。在图6的变型中,amm 640的延伸顶点680形成96
°
的角度,这是一个较宽的角度,其提供了锥形瓶子610的更佳的反射图像。
[0057]
图7示出了图2和图3所示的amm的变型。图7所示的系统700具有镜头/相机组件720/730。在图7变型中,延伸的顶点780形成84
°
的角度,这是一个较窄的角度,其提供了锥形瓶子710的更佳的反射图像,其中瓶子的较宽部分靠近顶点780。
[0058]
在图2、图3、图6和图7的实施例中,从成像相机周围或后面的(一个或多个)光源引导均匀照射(未示出),光向下指向圆锥形镜。圆锥形镜在光学路径中提供折叠功能。以这种方式,定位于圆锥形镜的中心处的整个瓶身都被均匀地照射用于成像。
[0059]
本文所述的使用圆锥形镜的amm的示例提供了3d路径折叠,这种3d 路径折叠提供了血液培养瓶的整个主体的图像。在替代实施例中,成像系统可以由荧光检测系统代替。在这种替代配置中,相机被光传感器代替。发射滤光片放置在传感器前面。在这个实施例中,瓶子被具有较短波长(例如,以560nm为中心的窄带波长)的激发光照射。因此,放置在传感器前面的发射滤光片是截止波长为例如635nm的长通滤光片。在这个实施例中,瓶子可以被试管或比色皿(cuvette)代替。试管或比色皿将放置在amm中,正如瓶子如本文所述放置在amm中一样。试管或比色皿将被向上传播到试管或比色皿底部的激发光束照射。
[0060]
图8a-图8c示出了用于将瓶子接收在用于成像的圆锥形镜中的设备。图8a是设备800的侧透视图,其具有用于支架815的支撑件810,该支架用于保持将瓶子830接收到其中以供成像的圆锥形镜820。支架815具有开口825,瓶子830将穿过该开口。马达839装配在支架815上,用于将闸门835从图 8a-图8c和图9a所示的关闭位置移动到图9所示的打开位置。开槽光学开关845、850感测闸门835的打开位置和关闭位置。闸门835直接连接到马达 840的轴(未示出)。
[0061]
相机840定位在支撑件810上的支架815上方。相机840向下瞄准以捕获瓶子810上的标签(未示出)的图像。相机840通过支架841固定到支撑件810。如上所述,圆锥形镜820允许在一个图像中捕获整个标签的图像,该图像然后通过将极坐标转换为笛卡尔坐标进行处理,以得到标签的未失真图像。
[0062]
如图9a所示,支架815具有闸门835,其将瓶子830支撑在圆锥形镜820 中以供成像。当成像完成时,闸门835如图9b所示枢转离开。一旦闸门不再覆盖开口825,瓶子830就将从支架815掉落。
[0063]
参考图10a-图10d,圆锥形镜920被倒置并由支架915保持在支撑件910 上。瓶子930通过支架915中的开口916插入。在一方面,瓶子930通过机械臂(未示出)定位到圆锥形镜中,该机械臂将瓶子930保持在适当位置以供成像。本领域技术人员将理解,瓶子930通过多种不同的机械装置保持在圆锥形镜920中。例如,支架915可以配置有将瓶子930保持在适当位置以供成像的夹具。在另一个示例中,支架915可以配置有张紧环,该张紧环允许瓶子930在施加足够的力的情况下穿过环,但是当不再施加力时将瓶子930 保持在适当位置。通过相机940获得图像。相机940通过支架941固定到支撑件910。如图10d所示,相机940与处理
器950通信。处理器950接收来自瓶子的标签的极坐标图像,该极坐标图像是由圆锥形镜920的镜面化内表面反射的标签图像。处理器950用指令编程以使用极坐标变换将标签的极坐标图像映射到笛卡尔坐标。该图像是使用极坐标变换从由圆锥形镜920的镜面化内表面反射的标签的图像变换的。
[0064]
图11是角锥形镜1020的示意图,其还提供柱形样品容器1030上的标签的360
°
图像。瓶子1030放置在角锥形镜(pyramidal mirror)1020中,并且底部搁置在角锥形镜的较窄基部上。相机1040定位于角锥形镜1020上方。可以通过在旋转镜子的同时拍摄多张图像并将它们拼接在一起来形成图像。提供示意性示出的导轨1042用于沿x和y定位相机1040。当柱形样品瓶1030 安放在角锥形镜1020中时,旋转马达1025使角锥形镜1020旋转。在角锥形镜1020的基部1015下方提供活板门(trap door)(未示出)。当打开时,活板门允许柱形样品容器落入滑槽(chute)(未示出)中,使得柱形样品容器1030 可以从角锥形镜1020落入滑槽中。
[0065]
本文公开了提供获得柱形样品容器上的标签图像和关于样品容器内容物的信息(例如,血容量、泡沫的存在、填充水平、柱形样品容器的颈部中培养基的存在或不存在)的能力的系统的示例。该系统和方法获得该信息同时维持吞吐量速度,从而可以快速评估大量柱形样品容器。还需要的是允许准确获得图像信息和内容信息的成像环境。该系统能适用于不同尺寸和配置的柱形样品容器,尽管所有容器都设想为提供放置标签的柱形表面。
[0066]
图12是成像设备1100的示意图。该设备具有平台1110,柱形样品容器 1130放置在该平台上。设备1100还具有扫描仪1140。带有夹具1155的夹臂 1150夹住柱形样品容器1130的颈部1156并用于将柱形样品容器1130放置在平台1110的旋转闸门1165上。夹臂1150可沿x(1151)、y(1152)和z(1153) 移动,使得夹臂1150可以用于将样品容器1130以直立位置放置在旋转闸门 1165上,并且当样品容器水平躺在滑槽1160中时,取回该样品容器1130。滑槽1160接收处于直立位置的柱形样品容器并且使柱形样品容器躺着处于水平位置。因此滑槽1160用作翻转站以将柱形样品容器从直立位置翻转到水平位置。夹臂1150是可旋转的,使得当柱形样品容器水平躺着时,夹具1155可以夹住柱形样品容器1130。在图12所描述的设备中,在通过旋转闸门1165 使柱形样品容器旋转时,获得标签1131的图像。然后将该图像拼接在一起以形成标签1131的完整图像。将图像拼接在一起以形成更大的图像对于本领域技术人员来说是众所周知的,本文不再详细描述。
[0067]
旋转闸门由马达(未示出)旋转。当夹具1155可以释放旋转闸门1165 上的柱形样品瓶1130时,传感器通知夹臂1150。为了成像,旋转平台1110 (旋转闸门1165位于平台1110的主要部分的表面下方)沿一个方向(顺时针或逆时针)旋转。在成像设备1100已获得了整个标签1131的图像并且还已获得了图像信息之后,关闭成像设备(例如,相机、扫描仪、灯等),其中从图像信息中获得泡沫的存在或不存在、填充水平以及关于柱形样品容器的内容物的其他信息。旋转闸门1165也可以被致动而与滑槽1160不对准。当旋转闸门1165与滑槽1160对准时,当瓶子放置在旋转闸门1165上用于成像时,柱形样品容器不滑过滑槽。可以通过在瓶子旋转约45度之前和之后拍摄几张图像并且然后将这些图像拼接在一起以提供完整瓶子的图像来形成完整的图像。在成像之后,旋转平台1110沿相反方向旋转,直到闸门1165被致动而与滑槽1160的开口不对准。这允许柱形样品容器1130滑过滑槽1160的开口,该滑槽有坡道1166和平台1167。柱形样品容器1130从坡道1166缓慢下来并水平地搁置在平
台1167上,从这里它被夹臂1150的夹具1155取回。在这方面,坡道1166具有轨道1168、1169,它们是间隔开的,使得在柱形样品容器 1130从坡道1166缓慢下来时,柱形样品容器1130的颈部适配在轨道1168、 1169之间,允许柱形样品容器1130平放。在图14c中更容易观察到轨道1168 和1169。
[0068]
未示出校准板,该校准板安置在平台1110的与扫描仪1140相对的端部上。校准板可以用于校准扫描仪1140,以确保当柱形样品容器1130放置在旋转闸门1165上时,它将位于扫描仪的正确视野中。旋转闸门1165被配置成提供稳定的表面,在该表面上设置柱形样品容器1130用于成像。由于在使用之前对柱形样品容器进行消毒可能会在柱形样品容器1130的底表面中引入变形或不规则,因此旋转闸门1165可以提供有凹入部分,该凹入部分将允许柱形样品容器的底部外周牢固地坐落在旋转闸门1165上,还在柱形容器的底表面内部和柱形样品容器1130的表面之间提供间隙,使得任何表面变形都不会导致柱形样品容器以不稳定的方式坐落。
[0069]
旋转闸门的替代结构包括橡胶驱动轮,其邻近柱形样品容器或旋转夹持器,诸如用于自动拧上或拧下盖的旋转夹持器。如果使用这样的旋转机构,则该系统将提供有活板门或其他机构,以允许柱形样品容器在成像完成时前进到滑槽中。
[0070]
图13是图12的成像设备1100的仰视图。在图13中,旋转闸门1165示为与滑槽1160不对准。在柱形样品容器1130向下沿滑槽1160行进之后,它搁置在水平位置,其颈部安置在轨道1168、1169之间。夹臂1150的夹具1155 旋转以夹住柱形样品容器1130的底部以将其从滑槽中移除。
[0071]
图14a-图14d示出了图12的替代实施例系统1100,其中平台1110具有安装在其下方的旋转平台1111。图14a是从系统1100上方的透视图。图14b 是系统1100的向上透视图。图14c是系统1100的侧视图。图14d是系统1100 的向下透视图。旋转平台1111由轴1170驱动,该轴由马达1171旋转,轴1170 从该马达延伸。皮带1172将轴1170耦连到旋转平台1111,使旋转平台1111 旋转。在相机1140获得柱形样品容器1130的图像之后,轴1170的旋转被反转,并且,当旋转平台沿相反方向旋转时,旋转平台1111枢转远离,允许柱形样品容器1130通过平台1100中的开口1112滑入滑槽1160中。
[0072]
图14a-图14d的实施例具有用于柱形样品容器1130的保持站1180。保持站1180具有坡道结构1181,使得柱形样品容器1130将安放处于直立位置,只要它首先将底部放置到保持站1180中即可。机械臂1150用于将柱形样品容器1130带入保持站1180中。机械臂1150还将柱形样品容器1130移动到成像位置1141并将其放置在其中,并且从滑槽1160中取回柱形样品容器1130。板1142设置在成像位置1141后面以为图像提供静态背景。柱形样品容器1130 旋转预定度数(例如,20度、30度等),并且然后将每个旋转增量的图像拼接在一起以获得标签的整个图像。
[0073]
图15是图12的替代实施例,但是其中柱形样品容器不旋转的实施例。在该实施例中,系统2000具有角锥形镜2020,诸如图11所示和描述的锥形镜,对于该实施例,可以通过在图像之间使瓶子旋转约45度之前和之后拍摄几张图像并且然后将这些图像拼接在一起来形成完整的图像。该系统具有水平滑动的活板门2025。当活板门2025向内推进时,它将柱形样品容器2130 保持在适当位置以供扫描仪2140成像。捕获的图像是整个标签2131的图像。带有夹具2155的夹臂2150夹住柱形样品容器2130的颈部2156,并且用于将柱形样品容
器2130放入角锥形镜2020中用于成像。夹臂2150可沿x、y和z 移动,使得夹臂2150可以用于将柱形样品容器2130以直立位置放置在角锥形镜2020中,并且当柱形样品容器水平躺在滑道2160中时取回柱形样品容器2130。当活板门2025向外推进时,柱形样品容器2130通过滑道2160落下并且被夹臂2150移除。替代实施例部署了其他类型的门以允许柱形样品容器下降到滑槽2160中。合适的替代门的示例包括折叠门、滑动门或回缩销。
[0074]
图16示出了替代系统3000,其中使用多个相机3140来获得柱形样品容器3130上的标签3131的图像。用多个相机获得图像是用于从柱形物体组装“平的”图像的众所周知的技术,因为每张图像只是弯曲物体的一段。将这样的图像拼接在一起也是众所周知的,并且本文不再详细描述。系统3000具有带有活板门3025的平台3110。活板门3025关闭并且柱形样品容器保持在平台3110上用于成像。如图所示,相机3140安装在环形印刷电路板3145上。如上所述,夹臂3150用于夹住柱形样品容器3130的颈部3156并将其放置在成像设备中。在成像之后,活板门3025被致动并且柱形样品容器3130通过滑槽3160落下并且被夹臂3150移除。
[0075]
图17示出了没有活板门的系统4000。在该实施例中,夹臂4150用于放置并将柱形样品容器4130从角锥形镜4020中移除,该角锥形镜的基部4021 中没有开口。扫描仪4140用于获得标签4131的整个区域的单张图像。在成像之后,在该实施例中,如果用户试图让柱形样品容器通过基部而不是颈部被夹住,则夹臂4150将从角锥形镜4020中移除柱形样品容器4130并将其放置在滑槽4160中,其中它将如上所述滑动到水平位置,之后夹臂4150将通过夹住柱形样品容器4130的基部而从滑槽4160中移除柱形样品容器。
[0076]
图18是诸如图12所示的系统5000,但其中夹臂5150将柱形样品容器 5130移动到成像位置并移动到滑槽5160,该滑槽将柱形样品容器从直立位置翻转到水平位置。夹臂5150具有安装在其上的扫描仪5130。一旦夹臂5150 将柱形样品容器5130放置到旋转平台5110上,夹臂就前进以将扫描仪5140 与柱形样品容器5130对准,以在旋转平台5110旋转柱形样品容器5130时获得标签5131的图像。在获得柱形样品容器的图像之后,然后夹臂5150将柱形样品容器移动到滑槽5160。当放置在滑槽5160中时,柱形样品容器从其所放置的竖直位置翻转到水平位置,在该位置它通过由夹臂5150抓住柱形样品容器5130的底部而取回。
[0077]
图19是不使用滑槽将柱形样品容器从直立位置旋转到水平位置的系统 6000。系统6000部署了倾斜夹持器6050,该倾斜夹持器夹住柱形样品容器 6130的颈部6100。系统6000使用放置在平台6115下方的旋转平台6110以确保扫描仪6140捕获整个标签6131的图像。在通过扫描仪6140捕获柱形样品容器6130的图像之后,夹臂6150的末端执行器6155旋转并设置倾斜夹持器6050,使得倾斜夹持器的平坦表面6051搁置在平台6115上。然后夹臂释放柱形样品容器6130的颈部6100。然后通过搁置在平台6115上的倾斜夹持器6050将柱形样品容器保持在水平位置。然后夹臂6150旋转并将末端执行器6155推进到适当位置以抓住柱形样品容器6130的底部,该柱形样品容器被保持在水平位置。末端执行器6155然后抓住柱形样品容器6130的底部并将柱形样品容器6130输送离开平台6100。倾斜夹持器不与柱形样品容器6130 一起输送离开。
[0078]
图20示出了系统7000,该系统部署了滑槽7160以在柱形样品容器水平躺在滑槽7160中时使柱形样品容器7130旋转。如上所述,夹臂7150将柱形样品容器保持在竖直取向。
夹臂7150将柱形样品容器7130放置在滑槽中,在这里它沿着轨道7168和7169滑下坡道7166。柱形样品容器7130的颈部 7100装配在轨道7168、7169之间。滑槽7160具有滚轮7601和7602。滚轮可以用于使柱形样品容器7130旋转。利用放置在旋转的柱形样品容器上方的扫描仪7140,获得标签7131的图像。然而,当柱形样品容器7130处于水平位置时,不能观察到柱形样品容器7130的颈部7100中的接种培养物的弯月面。因此,在该系统中,添加到样品中的样品(例如,血液)的体积不能通过观察处于水平位置的柱形样品容器来确定。在获得柱形样品容器上的标签 7131的图像之后,夹臂7150抓握柱形样品容器7130的底部以将其从滑槽7160 中移除。
[0079]
图21是用于定位柱形样品容器以用于成像的流程图。在步骤8001中,打开并调谐扫描仪的光源,以便正确的强度和波长用于扫描。该步骤由软件控制。在步骤8002中,传感器验证柱形样品容器处于正确位置。在柱形样品容器旋转的那些实施例中,瓶子的旋转在步骤8003开始。然后在步骤8004 中,扫描仪扫描柱形样品容器上的条形码和任何基准标记。在步骤8005中,当识别基准时,柱形样品容器的位置被系统捕获。在步骤8006中,旋转柱形样品容器,使得查看窗口(即,未被标签覆盖的柱形样品容器的部分)被安置在扫描仪/相机的前面,以确定柱形样品容器中的液体水平。在步骤8007中,针对血容量测量(bvm)调整光源。在步骤8008中,系统捕获柱形样品容器中的液体弯月面与蚀刻在柱形样品容器上的线之间的距离(用于容量测定)。消融线在制造期间蚀刻在瓶子上定制高度处,表示床边患者血液的预期填充水平。成人的典型填充量为8-10ml,儿童使用特殊的ped瓶,填充量为3ml。每种培养基类型都有公布的预期填充量,这用于计算用户填充过满或填充不足的量。样品容器中患者血液的容量是使用血液线和消融线之间的高度差来确定的。通过了解柱形样品容器的容量特性,计算出患者血液填充量。
[0080]
在步骤8009中,血容量被报告给数据库。在步骤8010中,调整光源(例如,从蓝色到红色或白色)以获得标签的图像。在步骤8011中,柱形样品容器以设定速度旋转。在预设的旋转度数(例如,20度)之后捕获图像,直到获得整个标签的完整系列图像。在步骤8012中,将图像拼接在一起以形成标签的完整图像。拼接后的图像信息被反馈回给旋转控制器,该旋转控制器继续旋转柱形样品容器,直到接收图像信息的缓冲区满为止。在步骤8013中,当柱形样品容器旋转了整整360度时,停止旋转。在步骤8014中,所有标签图像拼接在一起。在提供活板门以将柱形样品容器释放到溜槽中的那些系统中,活板门在步骤8015中打开。在步骤8016中,活板门关闭。在滑槽从竖直翻转到水平的那些系统中,柱形样品容器在水平位置被取回。
[0081]
如本文所用,术语“大致”、“约”、“基本上”和类似的术语旨在具有与本公开的主题所属领域的普通技术人员的常见和接受的用法相一致的广泛含义。审阅本公开的本领域技术人员应当理解,这些术语旨在允许对所描述的某些特征进行描述,而不将这些特征的范围限于所提供的精确数值范围。因此,这些术语应被解释为指示对所描述的主题的非实质性或不重要的修改或改变并且被认为在本公开的范围内。
[0082]
从前述内容并参考各种附图,本领域技术人员将理解在不脱离本公开的范围的情况下还可以对本公开进行某些修改。虽然已在附图中示出了本公开的若干实施例,但并不旨在本公开限于此,因为旨在本公开的范围应与本领域所允许的一样宽,并且说明书应同样解读。因此,以上描述不应被解释为限制性的,而仅仅是特定实施例的例证。本领域技术
人员将设想在所附权利要求的范围和精神内的其他修改。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。