1.本发明涉及超弹体检测技术领域,具体涉及一种超弹体薄膜单双轴拉伸装置及应力应变同步检测方法。
背景技术:
2.超弹体中的介电弹性体是智能高分子弹性聚合物,该材料能够在电场力的作用下产生大幅度变形,与形状记忆合金、压电陶瓷等传统的硬质材料相比,具有大变形,能量密度高,驱动力大,机电转化效率高,结构简单和质量轻等特点。介电弹性体由美国斯坦福研究院于1991年提出并开始研究,基于介电弹性体的这些特点,该材料被逐渐应用于柔体机械和软物质科学等领域。通常介电弹性体驱动器制备过程中的必要步骤就是将超弹体薄膜进行预拉伸,目前并没有满足适用于超弹体材料的特殊拉伸需求的实验设备,为了使得驱动器制备过程顺利开展,有必要设计一个既能满足拉伸需求又能多次重复使用的薄膜预拉伸装置。实现薄膜的双等轴预拉伸一般会采用两步拉伸方法,先将薄膜同一水平两侧夹持住,然后沿着x轴方向拉伸至预期的尺寸,再将薄膜另外两侧夹持住,沿着y轴方向拉伸至预期尺寸,固定四个加持位置,最终得到目标预拉伸厚度的薄膜。
3.薄膜在等双轴拉伸过程中,不是先将一边拉伸后再拉伸另一边的薄膜,而是既要考虑x 轴方向的伸长又要考虑y轴方向上的伸长。拉伸过程中对角线上的变化量是x轴与y轴方向上合力拉伸的结果。事实上,在实际的拉伸过程中,薄膜其本身的软弹特性无法将边上的拉伸力很好的延伸到对角线上,如果在拉伸过程中边角的拉伸力无法满足边角薄膜同步伸长,就会在边角处产生拉裂的情况。在一些类似多轴传动装置中,会为每根轴上安装一个电机,这样的设计方式需要对每个轴上的电机进行同步调试。
技术实现要素:
4.本发明为克服现有技术不足,提供一种超弹体薄膜单双轴拉伸装置及应力应变同步检测方法。本拉伸装置由单个电机输出同时转为四个方向上的输出实现直线运动,同时采用闭环的步进电机,达到一个电机实现四个方向的平动。
5.一种超弹体薄膜单双轴拉伸装置包含电机、换向传动机构、折展机构、磁铁、滑台、导轨和框架;框架内设有换向传动机构,换向传动机构具有一个输入源和两个输出源;输出源由输入源提供动力,输入源与第一丝杠副联动,两个输出源分别与第二丝杠副联动,输入源的丝杠与两个输出源的丝杠垂直,两个输出源的丝杠共轴线设置,第一丝杠副由布置在框架上的电机提供动力,滑台与对应的丝杠副的螺母固接,且滑台在导轨上滑动,导轨布置在框架上,相邻两个滑台之间设置有折展机构,折展机构的端部固定有强磁铁,超弹体薄膜通过两侧布置的两种极性相反的强磁铁固定。
6.一种超弹体薄膜应力应变同步检测方法,包含如下步骤:
7.1)、计算机发出指令给步进电机,将拉伸装置恢复到初始位置,然后将超弹体薄膜11 平放在折展机构上,最后利用磁铁将超弹体薄膜固定在折展机构上;
8.2)、用颜料在超弹体薄膜上画出标记点,将高速相机布置在超弹体薄膜上方;
9.3)、将测力计安装在折展机构上;
10.4)、计算机发出指令开始拉伸;
11.5)、拉伸过程中高速相机采集超弹体薄膜上标记点的尺寸变化传输到计算机,测力计采集到的拉力传输到计算机,经过数据处理可同步得到超弹体薄膜拉伸过程中的应力应变,并同步输出应力应变曲线图,实现实时监控超弹体薄膜拉伸过程中的应力应变情况;
12.6)、拉伸到目标长度后停止拉伸。
13.本发明相比现有技术的有益效果是:
14.本发明可实现超弹体薄膜单双轴的拉伸及测试,利用高速相机及测力计可同步检测出超弹体薄膜拉伸过程中的应力应变情况,达到实时监控的效果,能有效降低薄膜撕裂的风险,采用强磁铁和菱形剪叉机构固定也可以进一步地降低拉伸过程中薄膜撕裂的风险,同时,用一个电机实现四个方向的平动,极大地提高了拉伸效率。
15.在拉伸过程中,安装在超弹体薄膜正上方的高速相机通过采集超弹体薄膜上标记点的尺寸变化传输到计算机,同时安装在菱形夹紧机构上的测力计采集到的拉力也传输到计算机,经过数据处理可同步得到超弹体薄膜拉伸过程中的应力应变,并输出应力应变曲线图,实现实时监控薄膜拉伸过程中的应力应变情况。
16.下面结合附图和实施例对本发明的技术方案作进一步地说明:
附图说明
17.图1为本发明的整体结构示意图;
18.图2为去掉超弹体薄膜的本发明结构示意图;
19.图3为磁铁布置在折展机构的示意图;
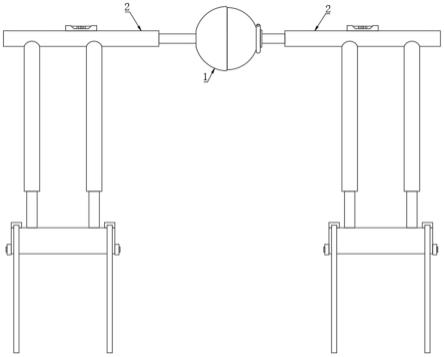
20.图4为换向传动机构的示意图;
21.图5为数显标尺的布置示意图;
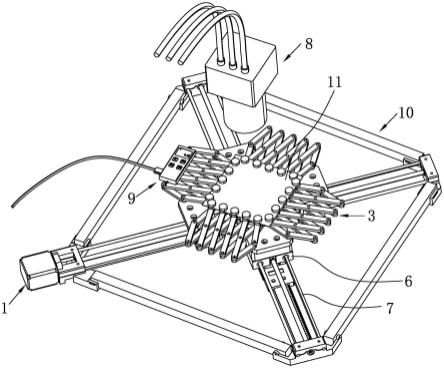
22.图6为应力应变检测所利用的单双轴拉伸装置的示意图。
具体实施方式
23.结合图1-图4说明,一种超弹体薄膜单双轴拉伸装置包含电机1、换向传动机构2、折展机构3、强磁铁5、滑台6、导轨7和框架10;
24.框架10内设有换向传动机构2,换向传动机构2具有一个输入源和两个输出源;
25.输出源由输入源提供动力,输入源与第一丝杠副41联动,两个输出源分别与第二丝杠副42联动,输入源的丝杠与两个输出源的丝杠垂直,两个输出源的丝杠共轴线设置,第一丝杠副41由布置在框架10上的电机1提供动力,滑台6与对应的丝杠副的螺母固接,且滑台6在导轨7上滑动,导轨7布置在框架10上,相邻两个滑台6之间设置有折展机构3,折展机构3的端部固定有强磁铁5,超弹体薄膜11通过两侧布置的两种极性相反的强磁铁 5固定。本实施方式的折展机构3在滑台6移动过程中,随同展开或折叠,以实现对超弹体薄膜11的相对方向(单轴)拉伸或四侧(双轴)同步拉伸。
26.本实施方式可实现超弹体薄膜单双轴的拉伸及测试,超弹体薄膜11相对的两条边被固定可进行单轴拉伸检测,或者超弹体薄膜的四条边均被固定可进行双拉伸检测,利用
高速相机及测力计可同步检测出超弹体薄膜拉伸过程中的应力应变情况,达到实时监控的效果,能有效降低薄膜撕裂的风险,采用强磁铁和菱形剪叉机构固定也可以进一步地降低拉伸过程中薄膜撕裂的风险,同时,双轴拉伸时,用一个电机实现四个方向的平动也极大地提高了拉伸效率。
27.该装置具有结构简单,拉伸过程不易破裂,可同步检测出薄膜拉伸过程中应力应变情况的特点,用一个电机即可实现四个方向的平动,只固定超弹体薄膜相对的两条边可进行单轴拉伸。通常,超弹体薄膜11的厚度为0.5mm-1mm。
28.较佳地,折展机构3与滑台6之间设置高度调整块12可调整拉伸平面的高度,为之后取出超弹体薄膜11提供合适的操作空间。折展机构3固定在压块16上,压块16、高度调整块12和滑台6三者连接在一起。
29.进一步地,如图5所示,所述换向传动机构2包含箱体21、主动锥齿轮22和两个从动锥齿轮23;第一丝杠副41的丝杠可转动地设置在箱体21和框架10上,箱体21固定在导轨7上,主动锥齿轮22固定在第一丝杠副41的丝杠,两个从动锥齿轮23固定在各自的第二丝杠副42的丝杠上,第二丝杠副42的丝杠可转动地设置在箱体21与框架10上,主动锥齿轮22与两个从动锥齿轮23啮合。电机1通过联轴器与第一丝杠副41的丝杠相连,通过主动锥齿轮22与从动锥齿轮23啮合带动两个第二丝杠副42的丝杠转动,进而带动滑台 6及折展机构3移动,最终将电机1的转动转换成拉伸超弹体薄膜11的平动,用一个电机即可实现四个方向的运动。
30.可选地,所述折展机构3为菱形剪叉机构,相邻两个滑台6与菱形剪叉机构相连,菱形剪叉机构上固定有强磁铁5。菱形剪叉机构由多个长条形杆相互铰接而成,由于菱形剪叉机构两端的变形是同步的,菱形两端的力也是等效的,故可实现测量菱形一端两点间的拉力等效成超弹体薄膜相应两点间的拉力。菱形剪叉机构左右两端中心通过螺栓固定在压块 16上,中间带孔的圆形强磁铁5通过螺栓固定在菱形剪叉机构上,超弹体薄膜11由上下两个强磁铁5夹持固定在菱形剪叉机构上,装夹方便,同时可以降低超弹体薄膜11拉伸时撕裂的风险。
31.进一步地,如图5所示,滑台6下方设置有数显标尺13,数显标尺13布置在箱体21 与框架10之间,滑台6与数显标尺13的移动数显板相连。数显标尺13的移动数显板与滑台6通过支架固定在一起,可实现实时读出滑台6的移动距离。
32.如图1和图6所示,一种超弹体薄膜单双轴拉伸装置还包含高速相机8,超弹体薄膜 11的上方设置有用于采集超弹体薄膜11上标记点15尺寸变化的高速相机8。安装在超弹体薄膜11正上方的高速相机8通过采集超弹体薄膜上标记点15的尺寸变化传输到计算机,同时安装在菱形剪叉机构上的测力计9采集到的拉力也传输到计算机,经过数据处理可同步得到超弹体薄膜11拉伸过程中的应力应变。
33.可选地,如图2和图5所示,所述框架10包含固定座101和连接杆102;四个固定座 101和四根连接杆102相互连接呈方形框架结构,连接杆102与固定座101铰接,电机1固定在固定座101上,第一丝杠副41的丝杠和第二丝杠副42的丝杠可转动地设置在箱体21 和固定座101上。框架设置为镂空方形结构,既方便丝杠副和换向传动机构2的布置,又便于超弹体薄膜11的拉伸及应力应变检测。
34.基于上述超弹体薄膜单双轴拉伸装置,还提供一种超弹体薄膜应力应变同步检测
方法,如图6所示;
35.1)、计算机14发出指令给步进电机1,将拉伸装置恢复到初始位置,然后将超弹体薄膜11平放在折展机构3上,最后利用强磁铁5将超弹体薄膜11固定在折展机构3上;
36.2)、用颜料在超弹体薄膜11上画出标记点15,将高速相机8布置在超弹体薄膜11上方;
37.3)、将测力计9安装在折展机构3上;
38.4)、计算机14发出指令开始拉伸;
39.5)、拉伸过程中高速相机8采集超弹体薄膜上标记点15的尺寸变化传输到计算机14,测力计9采集到的拉力传输到计算机14,经过数据处理可同步得到超弹体薄膜11拉伸过程中的应力应变,并同步输出应力应变曲线图,实现实时监控超弹体薄膜11拉伸过程中的应力应变情况;
40.6)、拉伸到目标长度后停止拉伸。
41.本实施方式可同步检测出超弹体薄膜11拉伸过程中应力应变情况的特点,用一个电机 1即可实现四个方向的平动,更进一步地,超弹体薄膜11相对的两条边被固定可进行单轴拉伸检测,或者超弹体薄膜11的四条边均被固定可进行双轴拉伸检测。
42.本发明已以较佳实施案例揭示如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可以利用上述揭示的结构及技术内容做出些许的更动或修饰为等同变化的等效实施案例,均仍属本发明技术方案范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。