1.本发明属于人机交互中的力触觉再现技术领域,尤其涉及一种基于三维正交背景电磁铁的非接触式力触觉再现系统及方法。
背景技术:
2.触感对于维持和丰富我们生活的大多数日常活动至关重要,其结合神经系统,肌肉骨骼系统和皮肤(我们最大的感觉器官)的资源实现了人类触摸感测。触摸的感觉器官是皮肤,它作为人体内最大的器官,约占人体重的15%。
3.近年来,随着力触觉人机交互技术的迅速发展,在机教育、医学和电子游戏等领域多种力触觉再现方法被研究出来,发明了各种各样的力触觉再现设备。较早时期的传统穿戴式、力反馈操作杆式的力触觉再现设备由于多采用力矩电机和机械结构等方式,十分影响操作者的力触觉感知真实性,此外还存在因机械连杆结构而限制了有效操作空间等缺点。
4.为了克服传统力触觉再现设备缺点,以实现更自然的力触觉再现,yeongyu等人设计了具有手指位置跟踪功能的穿戴式触觉设备wehaptic。该设备利用3个霍尔传感器和一个电机编码器,通过正向运动学测量指尖位置,并采用pi控制器结合基于扰动观测器的鲁棒控制算法,实现对电机电流进行精确控制,进而得到所需作用力。wang等人开发了基于软弯曲致动器的力反馈手套。由有机硅弹性体制成手套,通过往弹性体内部空腔注入空气,使其均匀膨胀。因此设备通过调节注入气压的大小,通过连杆传动机构,能让指尖感受到可控的反馈力。
[0005]“基于电磁场组合激励控制的非接触式力触觉再现系统及方法”专利中(申请公布号:cn109145513a),所提到的力触觉再现系统,其层叠式扁平螺线管状线圈可以在其内部形成特定电磁场,包括了掌心的永磁铁模块和多个指尖部位的电磁铁模块的感受模块用于实现力触觉再现。但其力触觉再现维度有限,只能实现一维的力触觉再现。
[0006]
berkelman等人设计了基于矩形扁平线圈的触觉交互系统,该系统的核心部件是一组重叠的矩形扁平线圈和一组磁强计传感器。在触觉交互过程中,手指佩戴的永磁铁的位置通过霍尔效应传感器阵列获得。但其能产生的作用力有限,其精度也需要进一步提升。
[0007]
pedram等人基于电磁铁阵列系统,实现了对反馈力的准确控制,他们首先设计了一个由27个圆柱形电磁铁紧密排列而成的平面电磁铁阵列用于产生空间磁场。通过力/力矩传感器和平移台测量了永磁铁在阵列上空50mm范围内不同位置处所受的轴向力、径向力以及力矩;所测得的数据反映了电磁铁阵列激励电流与永磁铁受力之间的映射关系,结合pd控制,该系统实现了指尖力/力矩的准确反馈并被成功应用于虚拟纹理再现。但其有效的操作空间大小还需要进一步提升。
技术实现要素:
[0008]
针对上述技术问题,本发明的目的在于提出一种基于三维正交背景电磁铁的磁力
式多点力触觉再现设备和控制方法,实现三维空间中感知作用力范围更大的力触觉反馈。
[0009]
本发明提出的基于三维正交背景电磁铁的非接触式力触觉再现方法,所述方法包含:
[0010]
步骤一,建立包括虚拟手和虚拟物体模型的虚拟场景,并建立背景电磁铁模块内部真实操作空间与虚拟场景的空间映射关系,以及人手与虚拟手的三维位置映射关系;
[0011]
步骤二,使用有限元方法,获得其中一个背景电磁铁子模块的背景磁场分布,并仿真得到指尖电磁铁模块的三维位置坐标、旋转角度、驱动电流和该背景电磁铁子模块驱动电流对于指尖电磁铁模块各个磁矩分量的作用力的映射关系,获取其离线仿真数据;
[0012]
将所得离线仿真数据推广到其他背景电磁铁子模块,从而得到所有背景电磁铁子模块和指尖电磁铁模块的离线仿真数据;
[0013]
步骤三,获取手指位置图像,得到人手指佩戴的指尖电磁铁的实时三维位置信息和旋转角度信息,确定手指数目,并确定是单点触觉再现还是多点触觉再现;
[0014]
步骤四,中央控制模块基于人手指与虚拟物体再虚拟场景的力触觉交互模型,计算当前时刻指尖电磁铁模块目标三维反馈力;
[0015]
步骤五,根据离线仿真数据和给定的指尖电磁铁模块三维位置坐标、旋转角度和目标三维反馈力,采用磁场叠加原理作用力生成控制方法,以得到指尖电磁铁模块和背景电磁铁模块的驱动电流。
[0016]
进一步的,所述步骤一中,以所述背景电磁场模块几何中心作为原点,以头尾相接的两个背景电磁铁子模块的中轴线为x轴,选取任意一个其他方向的背景电磁铁子模块的中轴线为y轴,根据右手法则确定z轴,建立空间坐标系;
[0017]
所述背景电磁铁子模块是1个由多层均匀密绕圆形线圈密绕而成的空心圆柱线圈,6个背景电磁铁子模块emx1,emx2,emy1,emy2,emz1,emz2作为独立单元,各自独立控制,分别对应6个驱动电流i
x1
、i
x2
、i
y1
、i
y2
、i
z1
、i
z2
;
[0018]
所述指尖电磁铁模块采用3个指尖电磁铁子模块对称放置于3个正交方向上的球形结构,编号为i的指尖电磁铁模块的x,y,z方向上的指尖电磁铁子模块分别被命名为em
ftix
,em
ftiy
,fm
ftiz
,分别对应3个驱动电流i
ftix
、i
ftiy
、i
ftiz
,子模块最大安全电流为i
ftmax
;所述指尖电磁铁子模块包含两个位于同一方向的圆形线圈串联而成,在空间上呈重叠状。
[0019]
进一步的,所述步骤二包含:
[0020]
步骤2.1,对背景电磁铁子模块emx1进行仿真,使其电流在-i
max
到i
max
之间递增,在x轴上取0到l 2r1,在y轴上取-r1到r1,r1为背景电磁铁的内径,l为三维背景电磁铁模块的高度,在z轴上取-r1到r1为仿真空间,r1为背电磁铁模块的子模块的内径长度;
[0021]
使用有限元方法,获得该空间内背景磁场分布,计算指尖电磁铁子模块emft1x的受力情况,具体关系表达为:
[0022]
f=f(p
1x
,p
1y
,p
1z
,α1,β1,γ1,i
x1
,i
ft1x
,i
ft1y
,i
ft1z
)
[0023]
其中,f表示emft1x所受作用力,(p
1x
,p
1y
,p
1z
)和(α1,β1,γ1)分别表示emft1x在空间中的三维位置坐标和旋转角度;
[0024]
步骤2.2,将所得到的emx1对emft1x的离线仿真数据推广到emft1y和emft1z,从而得到emx1对整个指尖电磁铁emft1的离线仿真数据;
[0025]
步骤2.3,将所得到的emx1对指尖电磁铁emft1的离线仿真数据推广到其余背景电
磁铁emx2、emy1
…
emz2,从而得到整个三维背景电磁铁对emft1的离线仿真数据将的其他所有背景电磁铁子模块,从而得到整个背景电磁铁模块的离线仿真数据。
[0026]
进一步的,所述步骤三包含:
[0027]
通过摄像头模块,获取当前时刻指尖电磁铁em
ft
的位姿信息p(p
x
,py,pz,α,β,γ),其中p
x
、py和pz为指尖电磁铁的三维坐标信息,α、β和γ为指尖电磁铁的旋转角度信息。
[0028]
进一步的,单点触觉再现控制方法具体如下:
[0029]
背景电磁铁子模块emx1和emx2的控制方法如下:根据指尖电磁铁em
ft1
在x轴上的坐标p
x1
,在emx1和emx2中选择使得指尖电磁铁与背景电磁铁中心点的距离|p
x1-p
emxi
|,i=1,2,较小的一个施加激励电流,当距离相等时选择emx1施加激励电流,将被选择的背景电磁铁记为emx_dr1,其驱动电流记为ix_dr1,而同方向上另一个背景电磁铁则记为emx_dr2,其驱动电流记为ix_dr2;记指尖电磁铁在x方向上的受力为f1x,x方向上的目标作用力记为f1x’;对指尖电磁铁3个子模块都施加最大安全电流i
ftmax
,选择合适的emx_dr1激励电流ix_dr1,电流方向为使得其磁矩指向x轴正方向的方向,使得指尖电磁铁x方向上的受力f1x等于目标作用力在x方向上的分量f1x’;当ix_dr1为最大安全电流imax时,指尖电磁铁作用力分量幅值|f1x|仍小于目标作用力分量幅值|f1x’|,则对emx_dr2施加合适的电流ix_dr2,电流方向为使得其磁矩指向x轴负方向的方向,使得指尖电磁铁满足受力要求;当对emx_dr1,emx_dr2都施加最大安全电流imax时,仍不能满足指尖电磁铁受力要求,则输出此时的f1x为饱和输出值;
[0030]
用同样的方法确定背景电磁铁emy1、emy2和emz1、emz2的驱动电流iy1、iy2和iz1、iz2。
[0031]
进一步的,多点触觉再现控制方法具体如下:
[0032]
通过摄像头模块获取多个指尖电磁铁em
fti
,i=1,2
…
n,n为出具再现点的个数,的位姿信息pi(pxi,pyi,pzi,αi,βi,γi),其中pxi、pyi和pzi为第i个指尖电磁铁的三维坐标信息,αi、βi和γi为第i个指尖电磁铁的旋转角信息,第i个指尖电磁铁所需总的背景电磁铁驱动电流记为isum_dri;
[0033]
背景电磁铁emx1和emx2的控制方法如下:对于每一个指尖电磁铁,依次根据其x坐标pxi,在emx1和emx2中选择使得指尖电磁铁与背景电磁铁中心点距离|p
xi-p
emxi
|,i=1,2,较小的一个施加激励电流,若距离相等时则选择emx1施加激励电流,将被选择的背景电磁铁记为emx_dr1,其驱动电流记为ix_dr1,而同方向上另一个背景电磁铁则记为emx_dr2,其驱动电流记为ix_dr2;记指尖电磁铁在x方向上的受力为fix,x方向上的目标作用力记为fix’;对指尖电磁铁3个子模块都施加最大安全电流i
ftmax
,选择合适的emx_dr1激励电流ix_dr1,使得指尖电磁铁x方向上的受力fix等于目标作用力在x方向上的分量fix’;当ix_dr1为最大安全电流imax时,指尖电磁铁作用力分量幅值|fix|仍小于目标作用力分量幅值|fix’|,则对emx_dr2施加合适的电流ix_dr2,使得指尖电磁铁满足受力要求;当对emx_dr1,emx_dr2都施加最大安全电流imax时,仍不能满足指尖电磁铁受力要求,则取当前电流配置为饱和电流输出;
[0034]
依次得到每个指尖电磁铁的所需电流总和的绝对值|isum_dr|,并将每个指尖电磁铁的所需电流按大小排序,输出所需电流总和绝对值最大的指尖电磁铁的背景电磁铁电流配置,并调节该指尖电磁铁电流方向,使得其在x方向上的磁矩与背景电磁铁磁矩方向一
致;
[0035]
用同样的方法得到emy1、emy2和emz1、emz2的驱动电流iydri1、iydri2、izdri1、izdri2,并调节所有指尖电磁铁的电流,直至所有指尖电磁铁的3个方向的受力(f
xn
,f
yn
,f
zn
)与目标受力(f
′
xn
,f
′
yn
,f
′
zn
)的误差小于允许的误差值。
[0036]
本技术还提供基于三维正交背景电磁铁的非接触式力触觉再现系统,所述触觉再现系统包含背景电磁铁模块、指尖电磁铁模块、电磁铁驱动控制模块、摄像头模块、电源模块和中央控制模块;
[0037]
所述背景电磁铁模块包含3对空间上正交的6个背景电磁铁子模块,每个方向上两个电磁铁子模块;
[0038]
所述指尖电磁铁模块采用3个指尖电磁铁子模块对称放置于3个正交方向上的球形结构;
[0039]
所述电磁铁驱动控制模块包含电磁铁控制子模块和电磁铁驱动子模块,所述电磁铁控制子模块用于接收来自中央控制模块的控制信息,并生成pwm信号来控制电磁铁驱动子模块输出所需电信号;
[0040]
所述中央控制模块根据指尖位置信息与虚拟环境之间的交互,得到三维反馈力,并根据多点交互触觉再现控制算法,来实现从力到电磁铁激励电流的映射。
[0041]
进一步的,所述背景电磁铁模块通入特定激励电流以产生需要的背景电磁场。以所述背景电磁场模块几何中心作为原点,以头尾相接的两个背景电磁铁子模块的中轴线为x轴,选取任意一个其他方向的背景电磁铁子模块的中轴线为y轴,根据右手法则确定z轴,从而建立空间坐标系;所述背景电磁铁子模块是1个由多层均匀密绕圆形线圈密绕而成的空心圆柱线圈,6个子模块物理参数完全相同,6个背景电磁铁子模块emx1,emx2,emy1,emy2,emz1,emz2作为独立单元,各自独立控制,分别对应6个驱动电流i
x1
、i
x2
、i
y1
、i
y2
、i
z1
、i
z2
;
[0042]
所述指尖电磁铁模块采用3个指尖电磁铁子模块对称放置于3个正交方向上的球形结构,编号为i的指尖电磁铁模块的x,y,z方向上的指尖电磁铁子模块分别被命名为em
ftix
,em
ftiy
,em
ftiz
,分别对应3个驱动电流i
ftix
、i
ftiy
、i
ftiz
,子模块最大安全电流为i
ftmax
;所述指尖电磁铁子模块由两个位于同一方向的圆形线圈串联而成,在空间上呈重叠状;
[0043]
所述电磁铁驱动控制模块由电磁铁控制子模块和电磁铁驱动子模块组成;所述电磁铁控制子模块用于接收来自中央控制模块的控制信息,并生成pwm信号来控制电磁铁驱动子模块输出所需电信号;
[0044]
所述中央控制模块根据指尖位置信息与虚拟环境之间的交互,得到三维反馈力,并根据多点交互触觉再现控制算法,来实现从力到电磁铁激励电流的映射。
[0045]
进一步的,所述的三维背景电磁铁模块的每一个子模块,其内外径长度分别为r1、r2,高度为l,最大安全电流为i
max
;x方向上的两个背景电磁铁由子模块emx1,emx2头尾相接组合在一起,其轴线与x轴重合;y方向上的两个背景电磁铁子模块emy1,emy2对称于x=0平面安装在x方向上的背景电磁铁子模块组的两侧,其轴线与y轴重合;z方向上的两个背景电磁铁子模块emz1,emz2对称于z=0平面安装在x方向上的背景电磁铁子模块组两侧,其轴线与z轴重合。x方向的两个背景电磁铁的轴线中心坐标分别为(p
emx1
,0,0)、(p
emx1
,0,0)。
[0046]
进一步的,指尖电磁铁模块由3个正交放置的圆心在同一点的圆柱形空心线圈子
模块组成,每个子模块由两个线圈串联而成,在空间上是内外重叠的。
[0047]
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
[0048]
(1)基于磁场叠加原理设计的三维正交背景电磁铁模块可以在操作空间内产生需要的背景磁场,结合多个指尖电磁铁激励电流,可以实现三维空间中感知作用力范围更大的力触觉反馈;
[0049]
(2)以该控制方法设计的系统设备实现更精细的、多点的力觉以及触觉感知,增强体验者的真实感与沉浸感。
附图说明
[0050]
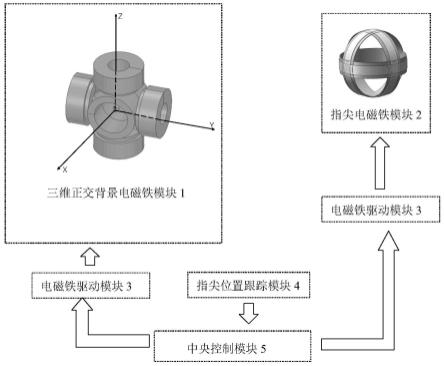
图1是背景电磁铁与指尖电磁铁的结构示意图;
[0051]
图2是基于三维正交背景电磁铁的磁力式多点力触觉再现系统设备结构示意图。
具体实施方式
[0052]
为了使本发明的控制方法和优点更加清楚,下面结合本发明实施例以及附图,对本发明的控制方法进行清晰、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0053]
实施例1
[0054]
本技术提供基于三维正交背景电磁铁的非接触式力触觉再现系统,所述触觉再现系统包含背景电磁铁模块、指尖电磁铁模块、电磁铁驱动控制模块、摄像头模块、电源模块和中央控制模块;
[0055]
所述背景电磁铁模块包含3对空间上正交的6个背景电磁铁子模块,每个方向上两个电磁铁子模块;
[0056]
所述指尖电磁铁模块采用3个指尖电磁铁子模块对称放置于3个正交方向上的球形结构;
[0057]
所述电磁铁驱动控制模块包含电磁铁控制子模块和电磁铁驱动子模块,所述电磁铁控制子模块用于接收来自中央控制模块的控制信息,并生成pwm信号来控制电磁铁驱动子模块输出所需电信号;
[0058]
所述中央控制模块根据指尖位置信息与虚拟环境之间的交互,得到三维反馈力,并根据多点交互触觉再现控制算法,来实现从力到电磁铁激励电流的映射。
[0059]
进一步的,所述背景电磁铁模块通入特定激励电流以产生需要的背景电磁场。以所述背景电磁场模块几何中心作为原点,以头尾相接的两个背景电磁铁子模块的中轴线为x轴,选取任意一个其他方向的背景电磁铁子模块的中轴线为y轴,根据右手法则确定z轴,从而建立空间坐标系;所述背景电磁铁子模块是1个由多层均匀密绕圆形线圈密绕而成的空心圆柱线圈,6个子模块物理参数完全相同,6个背景电磁铁子模块emx1,emx2,emy1,emy2,emz1,emz2作为独立单元,各自独立控制,分别对应6个驱动电流i
x1
、i
x2
、i
y1
、i
y2
、i
z1
、i
z2
;
[0060]
所述指尖电磁铁模块采用3个指尖电磁铁子模块对称放置于3个正交方向上的球形结构,编号为i的指尖电磁铁模块的x,y,z方向上的指尖电磁铁子模块分别被命名为em
ftix
,em
ftiy
,em
ftiz
,分别对应3个驱动电流i
ftix
、i
ftiy
、i
ftiz
,子模块最大安全电流为i
ftmax
;所
述指尖电磁铁子模块由两个位于同一方向的圆形线圈串联而成,在空间上呈重叠状;
[0061]
所述电磁铁驱动控制模块由电磁铁控制子模块和电磁铁驱动子模块组成;所述电磁铁控制子模块用于接收来自中央控制模块的控制信息,并生成pwm信号来控制电磁铁驱动子模块输出所需电信号;
[0062]
所述中央控制模块根据指尖位置信息与虚拟环境之间的交互,得到三维反馈力,并根据多点交互触觉再现控制算法,来实现从力到电磁铁激励电流的映射。
[0063]
进一步的,所述的三维背景电磁铁模块的每一个子模块,其内外径长度分别为r1、r2,高度为l,最大安全电流为i
max
;x方向上的两个背景电磁铁由子模块emx1,emx2头尾相接组合在一起,其轴线与x轴重合;y方向上的两个背景电磁铁子模块emy1,emy2对称于x=0平面安装在x方向上的背景电磁铁子模块组的两侧,其轴线与y轴重合;z方向上的两个背景电磁铁子模块emz1,emz2对称于z=0平面安装在x方向上的背景电磁铁子模块组两侧,其轴线与z轴重合。x方向的两个背景电磁铁的轴线中心坐标分别为(p
emx1
,0,0)、(p
emx1
,0,0)。
[0064]
进一步的,指尖电磁铁模块由3个正交放置的圆心在同一点的圆柱形空心线圈子模块组成,每个子模块由两个线圈串联而成,在空间上是内外重叠的。
[0065]
如图1所示,基于三位正交背景电磁铁的磁力式多点力触觉再现系统,包含背景电磁铁模块1、指尖电磁铁模块2、电磁铁驱动控制模块3、指尖位置跟踪模块4、和中央控制模块5。
[0066]
所述系统由背景电磁铁模块、指尖电磁铁模块、电磁铁驱动控制模块、指尖位置跟踪模块、电源模块和中央控制模块组成。
[0067]
所述三维背景电磁铁模块由三对空间上正交的6个背景电磁铁子模块组成,每个方向上两个电磁铁子模块。向背景电磁铁模块通入特定激励电流以产生需要的背景电磁场。
[0068]
所述背景电磁铁子模块是1个由多层均匀密绕圆形线圈密绕而成的空心圆柱线圈,6个子模块物理参数完全相同。6个背景电磁铁子模块作为独立单元,各自独立控制,对应6个驱动电流。
[0069]
所述指尖电磁铁模块采用3个指尖电磁铁子模块对称放置于3个正交方向上的球形结构,指尖电磁铁通入电流后即可在背景磁场中受力,所通电流的大小和方向可以改变受力的大小和方向。其中x方向上的指尖电磁铁子模块被命名为,y方向上的指尖电磁铁子模块被命名为,z方向上的指尖电磁铁子模块被命名为。
[0070]
所述指尖电磁铁子模块由两个位于同一方向的相同的圆形线圈组成。
[0071]
所述电磁铁驱动控制模块由电磁铁控制子模块和电磁铁驱动子模块组成;所述电磁铁控制控制子模块用于接收来自中央控制模块的控制信息,并生成pwm信号来控制电磁铁驱动子模块输出所需电信号。
[0072]
所述指尖位置跟踪模块基于leapmotion体感器,其主要功能是准确地获得指尖的位置信息,并将其传给中央控制模块。
[0073]
所述中央控制模块根据指尖位置信息与虚拟环境之间的交互,得到三维反馈力,并根据多点交互触觉再现控制算法,来实现从力到电磁铁激励电流的映射。
[0074]
实施例2
[0075]
根据上述基于三维正交背景电磁铁的非接触式力触觉再现系统,本技术还提供基
于三维正交背景电磁铁的非接触式力触觉再现方法,所述方法包含:
[0076]
步骤一,建立包括虚拟手和虚拟物体模型的虚拟场景,并建立背景电磁铁模块内部真实操作空间与虚拟场景的空间映射关系,以及人手与虚拟手的三维位置映射关系;
[0077]
步骤二,使用有限元方法,获得其中一个背景电磁铁子模块的背景磁场分布,并仿真得到指尖电磁铁模块的三维位置坐标、旋转角度、驱动电流和该背景电磁铁子模块驱动电流对于指尖电磁铁模块各个磁矩分量的作用力的映射关系,获取其离线仿真数据;
[0078]
将所得离线仿真数据推广到其他背景电磁铁子模块,从而得到所有背景电磁铁子模块和指尖电磁铁模块的离线仿真数据;
[0079]
步骤三,获取手指位置图像,得到人手指佩戴的指尖电磁铁的实时三维位置信息和旋转角度信息,确定手指数目,并确定是单点触觉再现还是多点触觉再现;
[0080]
步骤四,中央控制模块基于人手指与虚拟物体再虚拟场景的力触觉交互模型,计算当前时刻指尖电磁铁模块目标三维反馈力;
[0081]
步骤五,根据离线仿真数据和给定的指尖电磁铁模块三维位置坐标、旋转角度和目标三维反馈力,采用磁场叠加原理作用力生成控制方法,以得到指尖电磁铁模块和背景电磁铁模块的驱动电流。
[0082]
进一步的,所述步骤一中,以所述背景电磁场模块几何中心作为原点,以头尾相接的两个背景电磁铁子模块的中轴线为x轴,选取任意一个其他方向的背景电磁铁子模块的中轴线为y轴,根据右手法则确定z轴,建立空间坐标系;
[0083]
所述背景电磁铁子模块是1个由多层均匀密绕圆形线圈密绕而成的空心圆柱线圈,6个背景电磁铁子模块emx1,emx2,emy1,emy2,emz1,emz2作为独立单元,各自独立控制,分别对应6个驱动电流i
x1
、i
x2
、i
y1
、i
y2
、i
z1
、i
z2
;
[0084]
所述指尖电磁铁模块采用3个指尖电磁铁子模块对称放置于3个正交方向上的球形结构,编号为i的指尖电磁铁模块的x,y,z方向上的指尖电磁铁子模块分别被命名为em
ftix
,em
ftiy
,em
ftiz
,分别对应3个驱动电流i
ftix
、i
ftiy
、i
ftiz
,子模块最大安全电流为i
ftmax
;所述指尖电磁铁子模块包含两个位于同一方向的圆形线圈串联而成,在空间上呈重叠状。
[0085]
进一步的,所述步骤二包含:
[0086]
步骤2.1,对背景电磁铁子模块emx1进行仿真,使其电流在-i
max
到i
max
之间递增,在x轴上取0到l 2r1,在y轴上取-r1到r1,r1为背景电磁铁的内径,l为三维背景电磁铁模块的高度,在z轴上取-r1到r1为仿真空间,r1为背电磁铁模块的子模块的内径长度;
[0087]
使用有限元方法,获得该空间内背景磁场分布,计算指尖电磁铁子模块emft1x的受力情况,具体关系表达为:
[0088]
f=f(p
1x
,p
1y
,p
1z
,α1,β1,γ1,i
x1
,i
ft1x
,i
ft1y
,i
ft1z
)
[0089]
其中,f表示emft1x所受作用力,(p
1x
,p
1y
,p
1z
)和(α1,β1,γ1)分别表示emft1x在空间中的三维位置坐标和旋转角度;
[0090]
步骤2.2,将所得到的emx1对emft1x的离线仿真数据推广到emft1y和emft1z,从而得到emx1对整个指尖电磁铁emft1的离线仿真数据;
[0091]
步骤2.3,将所得到的emx1对指尖电磁铁emft1的离线仿真数据推广到其余背景电磁铁emx2、emy1
…
emz2,从而得到整个三维背景电磁铁对emft1的离线仿真数据将的其他所有背景电磁铁子模块,从而得到整个背景电磁铁模块的离线仿真数据。
[0092]
进一步的,所述步骤三包含:
[0093]
通过摄像头模块,获取当前时刻指尖电磁铁em
ft
的位姿信息p(p
x
,py,pz,α,β,γ),其中p
x
、py和pz为指尖电磁铁的三维坐标信息,α、β和γ为指尖电磁铁的旋转角度信息。
[0094]
进一步的,单点触觉再现控制方法具体如下:
[0095]
背景电磁铁子模块emx1和emx2的控制方法如下:根据指尖电磁铁em
ft1
在x轴上的坐标p
x1
,在emx1和emx2中选择使得指尖电磁铁与背景电磁铁中心点的距离|p
x1-p
emxi
|,i=1,2,较小的一个施加激励电流,当距离相等时选择emx1施加激励电流,将被选择的背景电磁铁记为emx_dr1,其驱动电流记为ix_dr1,而同方向上另一个背景电磁铁则记为emx_dr2,其驱动电流记为ix_dr2;记指尖电磁铁在x方向上的受力为f1x,x方向上的目标作用力记为f1x’;对指尖电磁铁3个子模块都施加最大安全电流i
ftmax
,选择合适的emx_dr1激励电流ix_dr1,电流方向为使得其磁矩指向x轴正方向的方向,使得指尖电磁铁x方向上的受力f1x等于目标作用力在x方向上的分量f1x’;当ix_dr1为最大安全电流imax时,指尖电磁铁作用力分量幅值|f1x|仍小于目标作用力分量幅值|f1x’|,则对emx_dr2施加合适的电流ix_dr2,电流方向为使得其磁矩指向x轴负方向的方向,使得指尖电磁铁满足受力要求;当对emx_dr1,emx_dr2都施加最大安全电流imax时,仍不能满足指尖电磁铁受力要求,则输出此时的f1x为饱和输出值;
[0096]
用同样的方法确定背景电磁铁emy1、emy2和emz1、emz2的驱动电流iy1、iy2和iz1、iz2。
[0097]
进一步的,多点触觉再现控制方法具体如下:
[0098]
通过摄像头模块获取多个指尖电磁铁em
fti
,i=1,2
…
n,n为出具再现点的个数,的位姿信息pi(pxi,pyi,pzi,αi,βi,γi),其中pxi、pyi和pzi为第i个指尖电磁铁的三维坐标信息,αi、βi和γi为第i个指尖电磁铁的旋转角信息,第i个指尖电磁铁所需总的背景电磁铁驱动电流记为isum_dri;
[0099]
背景电磁铁emx1和emx2的控制方法如下:对于每一个指尖电磁铁,依次根据其x坐标pxi,在emx1和emx2中选择使得指尖电磁铁与背景电磁铁中心点距离|p
xi-p
emxi
|,i=1,2,较小的一个施加激励电流,若距离相等时则选择emx1施加激励电流,将被选择的背景电磁铁记为emx_dr1,其驱动电流记为ix_dr1,而同方向上另一个背景电磁铁则记为emx_dr2,其驱动电流记为ix_dr2;记指尖电磁铁在x方向上的受力为fix,x方向上的目标作用力记为fix’;对指尖电磁铁3个子模块都施加最大安全电流i
ftmax
,选择合适的emx_dr1激励电流ix_dr1,使得指尖电磁铁x方向上的受力fix等于目标作用力在x方向上的分量fix’;当ix_dr1为最大安全电流imax时,指尖电磁铁作用力分量幅值|fix|仍小于目标作用力分量幅值|fix’|,则对emx_dr2施加合适的电流ix_dr2,使得指尖电磁铁满足受力要求;当对emx_dr1,emx_dr2都施加最大安全电流imax时,仍不能满足指尖电磁铁受力要求,则取当前电流配置为饱和电流输出;
[0100]
依次得到每个指尖电磁铁的所需电流总和的绝对值|isum_dr|,并将每个指尖电磁铁的所需电流按大小排序,输出所需电流总和绝对值最大的指尖电磁铁的背景电磁铁电流配置,并调节该指尖电磁铁电流方向,使得其在x方向上的磁矩与背景电磁铁磁矩方向一致;
[0101]
用同样的方法得到emy1、emy2和emz1、emz2的驱动电流iydri1、iydri2、izdri1、
izdri2,并调节所有指尖电磁铁的电流,直至所有指尖电磁铁的3个方向的受力(f
xn
,f
yn
,f
zn
)与目标受力(f
′
xn
,f
′
yn
,f
′
zn
)的误差小于允许的误差值。
[0102]
本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
[0103]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。