1.本发明涉及线缆剥皮技术领域,具体为一种全自动线缆剥皮器。
背景技术:
2.电缆、光缆等用于输送电流、信号均统称为线缆,主要用于控制和连接设备以及对电流进行输送,线缆的种类多种多样,可分为rvvp线缆、rg线缆、utp线缆、kvvp线缆、rvv线缆等。
3.线缆在生产时会通过剥皮器将线缆废品或废弃线缆表面的绝缘皮剥离从而将资源回收重新利用,在使用线缆时也会通过剥皮器将线缆表面的绝缘皮剥离用于安装接头或端子。
4.现有的全自动线缆剥皮器通常是通过多组对辊压轮将线缆输送和夹持,之后通过上下两个剥皮刀将绝缘皮割开从而达到剥皮效果,这种剥皮方法只适用于离线状态对线缆废品、废弃线缆或安装前线缆进行自动剥皮,如果需要对正在工作的线缆剥皮以安装接头时,线缆两端固定在设备或电塔上难以穿过多组对辊压轮与剥皮刀接触进行剥皮工作。
技术实现要素:
5.基于此,本发明的目的是提供一种全自动线缆剥皮器,以解决不便于在线剥皮的技术问题。
6.为实现上述目的,本发明提供如下技术方案:一种全自动线缆剥皮器,包括安装架、支撑架、绝缘皮和缺口,所述安装架上设置有剥皮组件,所述剥皮组件包括电机,所述电机输出端连接有主动齿轮,所述支撑架上连接有传动齿轮,所述支撑架上连接有转盘,所述转盘上连接有从动齿块,所述转盘上分别连接有调节架和螺杆,所述螺杆上连接有螺母,所述调节架上连接有剥皮刀,安装架上连接有滑轨,所述滑轨上连接有螺栓和滚轮架。
7.通过采用上述技术方案,电机启动后输出端驱动主动齿轮旋转,主动齿轮旋转后与两个传动齿轮啮合使两个传动齿轮旋转,两个传动齿轮旋转后与多个从动齿块啮合驱动转盘旋转,转盘旋转后带动调节架和剥皮刀旋转将线缆表面的绝缘皮切削剥离,剥皮刀的刀尖呈倾斜状从而在对绝缘皮切削时从外至内逐渐切削。
8.进一步的,所述支撑架连接于安装架底部,所述绝缘皮位于转盘内,所述绝缘皮内连接有线芯。
9.通过采用上述技术方案,电机启动后输出端驱动主动齿轮旋转,主动齿轮旋转后与两个传动齿轮啮合使两个传动齿轮旋转,两个传动齿轮旋转后与多个从动齿块啮合驱动转盘旋转,转盘旋转后带动调节架和剥皮刀旋转将线缆表面的绝缘皮切削剥离,剥皮刀的刀尖呈倾斜状从而在对绝缘皮切削时从外至内逐渐切削。
10.进一步的,所述支撑架和转盘上均开设有缺口,且两个所述缺口相连通。
11.通过采用上述技术方案,通过缺口的设置使线缆可以进入剥皮器内以便于处于在线状态对线缆剥皮,电机启动后输出端驱动主动齿轮旋转,主动齿轮旋转后与两个传动齿
轮啮合使两个传动齿轮旋转,两个传动齿轮旋转后与多个从动齿块啮合驱动转盘旋转,转盘旋转后带动调节架和剥皮刀旋转将线缆表面的绝缘皮切削剥离。
12.进一步的,所述传动齿轮设置有两个,且两个所述传动齿轮沿支撑架纵轴中心线对称分布。
13.通过采用上述技术方案,电机启动后输出端驱动主动齿轮旋转,主动齿轮旋转后与两个传动齿轮啮合使两个传动齿轮旋转,两个传动齿轮旋转后与多个从动齿块啮合驱动转盘旋转。
14.进一步的,所述调节架与螺杆活动连接,且所述剥皮刀的刀尖倾斜设置。
15.通过采用上述技术方案,当需要对其他直径的线缆进行剥皮工作时,可通过拧松螺母再调节调节架的高度之后再转动调节架使剥皮刀的刀尖对准线缆,从而便于对不同直径的线缆进行剥皮工作。
16.进一步的,所述从动齿块分别与两个传动齿轮相啮合,且两个所述传动齿轮均与主动齿轮相啮合。
17.通过采用上述技术方案,电机启动后输出端驱动主动齿轮旋转,主动齿轮旋转后与两个传动齿轮啮合使两个传动齿轮旋转,两个传动齿轮旋转后与多个从动齿块啮合驱动转盘旋转。
18.进一步的,所述从动齿块设置有多个,且多个所述从动齿块呈环形阵列状分布。
19.通过采用上述技术方案,电机启动后输出端驱动主动齿轮旋转,主动齿轮旋转后与两个传动齿轮啮合使两个传动齿轮旋转,两个传动齿轮旋转后与多个从动齿块啮合驱动转盘旋转。
20.综上所述,本发明主要具有以下有益效果:本发明通过剥皮组件的设置,通过缺口的设置使线缆可以进入剥皮器内以便于处于在线状态对线缆剥皮,电机启动后输出端驱动主动齿轮旋转,主动齿轮旋转后与两个传动齿轮啮合使两个传动齿轮旋转,两个传动齿轮旋转后与多个从动齿块啮合驱动转盘旋转,转盘旋转后带动调节架和剥皮刀旋转将线缆表面的绝缘皮切削剥离,剥皮刀的刀尖呈倾斜状从而在对绝缘皮切削时从外至内逐渐切削,从而避免切削量多大导致线缆受力晃动,同时两个传动齿轮与多个从动齿块啮合传动使缺口与某个传动齿轮对应时另一个传动齿轮可以传递扭矩,避免转盘旋转的连续性受到影响,当需要对其他直径的线缆进行剥皮工作时,可通过拧松螺母再调节调节架的高度之后再转动调节架使剥皮刀的刀尖对准线缆,从而便于对不同直径的线缆进行剥皮工作,方便在线对线缆进行剥皮工作,同时便于对不同直径的线缆进行剥皮。
附图说明
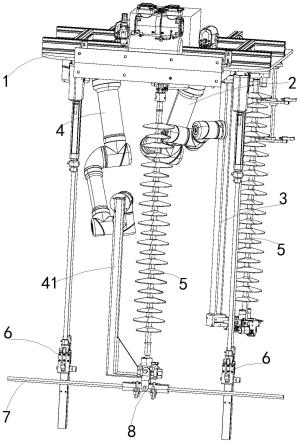
21.图1为本发明的剥皮器剖面结构示意图;图2为本发明的支撑架侧面结构示意图;图3为本发明的调节架爆炸结构示意图;图4为本发明的调节架结构示意图。
22.图中:1、安装架;2、支撑架;3、绝缘皮;4、线芯;5、缺口;6、剥皮组件;601、电机;602、主动齿轮;603、传动齿轮;604、从动齿块;605、转盘;606、调节架;607、螺杆;608、螺母;
609、剥皮刀;610、滚轮架;611、滑轨;612、螺栓。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
24.下面根据本发明的整体结构,对其实施例进行说明。
25.一种全自动线缆剥皮器,如图1、2、3和4所示,包括安装架1、支撑架2、绝缘皮3和缺口5,安装架1上设置有剥皮组件6。
26.具体地,剥皮组件6包括电机601,电机601输出端贯穿支撑架2一侧延伸至支撑架2另一侧连接有主动齿轮602,支撑架2另一侧连接有传动齿轮603,支撑架2另一侧下方贯穿有用于安装剥皮刀609的转盘605,转盘605顶部连接有用于传递扭矩的从动齿块604,转盘605一侧分别连接有用于调节剥皮刀609位置的调节架606和用于对调节架606限位的螺杆607,螺杆607上连接有螺母608,调节架606底部连接有用于切削绝缘皮3的剥皮刀609,安装架1底部两侧均连接有用于调节滚轮架610位置的滑轨611,两个滑轨611上分别连接有四个用于对滚轮架610限位的螺栓612和四个用于夹持线缆的滚轮架610,四个滚轮架610上均连接有滚轮,方便在线对线缆进行剥皮工作,同时便于对不同直径的线缆进行剥皮。
27.参阅图1和2,在上述实施例中,支撑架2连接于安装架1底部,绝缘皮3位于转盘605内,绝缘皮3内连接有线芯4,支撑架2和转盘605上均开设有用于穿过线缆的缺口5,且两个缺口5相连通,方便将线缆剥皮。
28.参阅图1、2、3和4,在上述实施例中,传动齿轮603设置有两个,且两个传动齿轮603沿支撑架2纵轴中心线对称分布,调节架606与螺杆607滑动连接,且剥皮刀609的刀尖倾斜设置,从动齿块604分别与两个传动齿轮603相啮合,且两个传动齿轮603均与主动齿轮602相啮合,从动齿块604设置有多个,且多个从动齿块604呈环形阵列状分布,方便在线对线缆进行剥皮工作,同时便于对不同直径的线缆进行剥皮。
29.本实施例的实施原理为:首先,在机器人上安装升降装置,之后将安装架安装在机器人上的升降装置上,之后通过机器人上的升降装置使剥皮器与正在工作的线缆接触,通过缺口5的设置使线缆可以进入剥皮器内以便于处于在线状态对线缆剥皮,之后工作人员拧松螺母608再调节调节架606的高度之后再转动调节架606,之后工作人员将剥皮刀609插入绝缘皮3中,之后工作人员再拧紧螺母608对调节架606限位,从而便于对不同直径的线缆进行剥皮工作,之后滑动四个滚轮架610使四个滚轮架610将线缆夹住通过滚轮对线缆限位,减少线缆在剥皮时的晃动,之后拧紧螺栓612增大滚轮架610与滑轨611之间的摩擦力从而避免滚轮架610位移。
30.电机601启动后输出端驱动主动齿轮602旋转,主动齿轮602旋转后与两个传动齿轮603啮合使两个传动齿轮603旋转,两个传动齿轮603旋转后与多个从动齿块604啮合驱动转盘605旋转,转盘605旋转后带动调节架606和剥皮刀609旋转将线缆表面的绝缘皮3切削剥离,机器人启动后带动剥皮器沿线缆移动,剥皮刀609的刀尖呈倾斜状从而在对绝缘皮3切削时从外至内逐渐切削,从而避免切削量多大导致线缆受力晃动,同时两个传动齿轮603与多个从动齿块604啮合传动使缺口5与某个传动齿轮603对应时另一个传动齿轮603可以
传递扭矩,避免转盘605旋转的连续性受到影响。
31.尽管已经示出和描述了本发明的实施例,但本具体实施例仅仅是对本发明的解释,其并不是对发明的限制,描述的具体特征、结构、材料或者特点可以在任何一个或多个实施例或示例中以合适的方式结合,本领域技术人员在阅读完本说明书后可在不脱离本发明的原理和宗旨的情况下,可以根据需要对实施例做出没有创造性贡献的修改、替换和变型等,但只要在本发明的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。