技术特征:
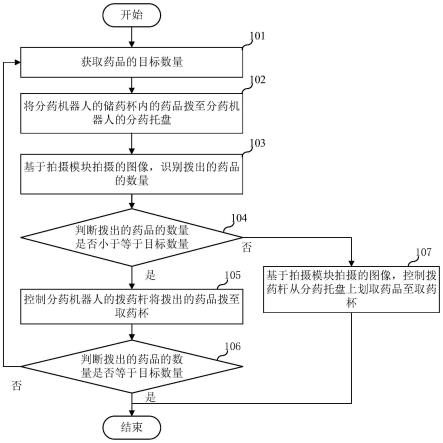
1.一种视觉分药方法,其特征在于,包括:获取药品的目标数量;将分药机器人的储药杯内的所述药品拨至所述分药机器人的分药托盘;基于拍摄模块拍摄的图像,识别拨出的药品的数量;判断所述拨出的药品的数量是否小于等于所述目标数量;若确定是,控制所述分药机器人的拨药杆将所述拨出的药品拨至取药杯;判断所述拨出的药品的数量是否等于所述目标数量;若确定所述拨出的药品的数量不等于所述目标数量,返回执行所述获取药品的目标数量的步骤;若确定不是,基于所述拍摄模块拍摄的图像,控制所述拨药杆从所述分药托盘上划取药品至所述取药杯。2.根据权利要求1所述的视觉分药方法,其特征在于,在所述基于拍摄模块拍摄的图像,识别拨出的药品的数量之前,还包括:判断所述拨出的药品是否排成预设形态;若确定是,执行所述基于拍摄模块拍摄的图像,识别拨出的药品的数量的步骤。3.根据权利要求1所述的视觉分药方法,其特征在于,若确定所述拨出的药品未排成预设形态,所述视觉分药方法还包括:判断所述拨药杆是否到达转动停止位,若确定是,控制所述拨药杆停止转动,执行所述基于拍摄模块拍摄的图像,识别拨出的药品的数量的步骤;若确定不是,控制所述拨药杆沿第一方向转动。4.根据权利要求3所述的视觉分药方法,其特征在于,在所述控制所述拨药杆沿第一方向转动之前,还包括:根据所述药品的类型,确定所述拨药杆的拨药速度。5.根据权利要求1所述的视觉分药方法,其特征在于,在所述基于所述拍摄模块拍摄的图像,控制所述拨药杆从所述分药托盘上划取药品至所述取药杯之后,还包括:控制所述拨药杆将剩余的药品拨至所述储药杯或所述分药机器人的废药杯。6.根据权利要求5所述的视觉分药方法,其特征在于,在所述控制所述拨药杆将剩余的药品拨至所述储药杯或所述分药机器人的废药杯之后,还包括:基于所述拍摄模块拍摄的图像,识别划取的药品的数量;判断所述划取的药品的数量是否等于所述目标数量;若确定是,控制所述拨药杆将所述划取的药品拨至所述取药杯;若确定不是,判断所述划取的药品的数量是否小于所述目标数量;若确定划取的药品的数量小于目标数量,控制所述拨药杆将划取的药品拨至所述取药杯,返回执行所述获取药品的目标数量的步骤;若确定划取的药品的数量大于所述目标数量,返回执行所述基于所述拍摄模块拍摄的图像,控制所述拨药杆从所述分药托盘上划取药品至所述取药杯的步骤。7.根据权利要求1所述的视觉分药方法,其特征在于,所述将分药机器人的储药杯内的所述药品拨至所述分药机器人的分药托盘,包括:确定所述储药杯位于所述分药托盘的纵向通孔下方;控制所述分药机器人的第一推杆推动所述储药杯的储药杯活动杯底向上移动;
控制所述拨药杆沿第一方向转动,以拨出所述储药杯内的药品。8.根据权利要求7所述的视觉分药方法,其特征在于,所述控制所述分药机器人的第一推杆推动所述储药杯的储药杯活动杯底向上移动,包括:根据所述目标数量,确定第一移动距离;控制所述第一推杆推动活动杯底向上移动所述第一移动距离。9.根据权利要求8所述的视觉分药方法,其特征在于,所述根据所述目标数量,确定第一移动距离,包括:根据所述目标数量,以及目标数量和第一移动距离的第一约束关系,计算所述第一移动距离;或者,根据所述目标数量、所述药品的信息,以及目标数量、药品的信息和第一移动距离的第二约束关系,确定所述第一移动距离;所述药品的信息包括所述药品的体积。10.根据权利要求9所述的视觉分药方法,其特征在于,在所述判断所述拨出的药品的数量是否小于等于所述目标数量之后,还包括:根据判断结果,调整所述第一约束关系或所述第二约束关系中的参数;或者,计算所述拨出的药品的数量和所述目标数量的差值;根据计算的差值,调整所述第一约束关系或所述第二约束关系中的参数。11.根据权利要求1所述的视觉分药方法,其特征在于,所述基于所述拍摄模块拍摄的图像,控制所述拨药杆从所述分药托盘上划取药品至所述取药杯,包括:基于所述拍摄模块拍摄的图像,确定第一角度和第二角度;控制所述拨药杆沿第二方向转动所述第一角度;控制所述拨药杆的前拨杆沿第一方向旋转第二角度;控制所述拨药杆沿第一方向旋转以划取药品至所述取药杯;其中,所述第一方向和所述第二方向的方向相反。12.根据权利要求11所述的视觉分药方法,其特征在于,所述基于所述拍摄模块拍摄的图像,确定第一角度和第二角度,包括:根据所述拍摄模块拍摄的图像,确定拨药信息;其中,拨药信息包括所述药品的分布区域、所述药品的体积、所述药品的数量和所述目标数量中的任意一个或任意组合;根据所述拨药信息,以及拨药信息和第一角度的第三约束关系,确定所述第一角度;根据所述拨药信息,以及拨药信息和第二角度的第四约束关系,确定所述第二角度。13.一种电子设备,其特征在于,包括:至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如权利要求1至12中任一项所述的视觉分药方法。14.一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现如权利要求1至12中任一项所述的视觉分药方法。
技术总结
本发明实施例涉及机器人领域,公开了一种视觉分药方法、电子设备及存储介质。本申请的部分实施例中,视觉分药方法包括:获取药品的目标数量;将分药机器人的储药杯内的药品拨至分药机器人的分药托盘;基于拍摄模块拍摄的图像,识别拨出的药品的数量;判断拨出的药品的数量是否小于等于目标数量;若确定是,控制分药机器人的拨药杆将拨出的药品拨至取药杯;判断拨出的药品的数量是否等于目标数量;若确定拨出的药品的数量不等于目标数量,返回执行获取药品的目标数量的步骤;若确定不是,基于拍摄模块拍摄的图像,控制拨药杆从分药托盘上划取药品至取药杯。该实施例通过拨药杆拨出指定数量的药品至取药杯,以便用户服用药品。以便用户服用药品。以便用户服用药品。
技术研发人员:黄晓庆 钱海洋 罗程
受保护的技术使用者:联达时代(南京)智能科技有限公司
技术研发日:2021.06.30
技术公布日:2022/10/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。