用于在v2x网络中进行数据传输的方法
技术领域
1.本发明涉及一种用于在v2x网络中进行数据传输的方法,以及一种用于实施该方法的通信控制模块。此外,本发明还涉及一种车辆系统,在该车辆系统中使用该通信控制模块。
背景技术:
2.从cn107040506a中已知一种用于在v2v网络(v2v:vehicle to vehicle,车对车)中进行数据传输的方法,在该方法中,在车辆之间的真正v2v通信之前传输上下文信息。
技术实现要素:
3.本发明的任务是对在v2x通信网络中进行数据传输的方法进行改善。此外,本发明的任务还是给出一种经改善的用于实施该方法的通信控制模块并提供一种优化的车辆系统。
4.该任务通过本发明来解决。本发明所提出的方法的有利构型能够通过在优选实施方式中所列举的措施实现。
5.根据本发明,提出一种用于在v2x通信网络中进行数据传输的方法,v2x:vehicle-to-everything(车对万物)。借助v2x消息进行在v2x通信网络中的数据传输,所述v2x消息由发送器进行编码并由至少一个接收器进行解码。v2x消息分别具有关于发送器的和/或接收器的周围环境的上下文信息,该周围环境是关于车辆和/或对象和/或人的周围环境,该车辆除机动车外还可以是电动自行车或其他车辆。将每个v2x消息的上下文信息用于减小该v2x消息的包大小和/或用于验证该v2x消息。
6.借助于将上下文信息用于v2x通信,能够通过如下方式有利地提高v2x通信网络的安全性:能够基于上下文信息验证每个v2x消息。尤其能够提前识别出具有消极验证结果的v2x消息并在必要时将该v2x消息降级为不那么可信的v2x消息或完全去除。因此如果至少一个接收器构造为车辆,则能够防止对车辆控制或者说车辆系统的可能的损害。此外,接收器可以独立于发送器交换v2x消息,并且有利地独立于:在真正通信之前与发送器建立可信的连接。这节省时间和减少开销,因为在真正的v2x通信之前不需要复杂的验证过程。通信伙伴之间的通信可以是即时的。
7.此外,有利地能够针对每个消息不仅通过所述至少一个接收器对v2x消息进行验证——即对v2x消息的内容在逻辑不一致性方面进行检查,而且由发送器基于上下文信息将v2x消息的包大小减少。同时,发送器可以在至少一个接收器不执行对消息的验证的情况下将v2x消息的包大小减少。通过将包大小减少能够使得消息交换更高效,并且能够更好地利用可供消息传输使用的频段(频谱)。在此,发送器和接收器并不限于车辆,而是例如也可以是对象——例如基础设施——构造为发送器。可以将在现有技术中所已知的方法用于编码和解码。
8.在另一实施方式中,通过如下方式减少v2x消息的包大小:发送器基于上下文信息
应用包括数据大小与待传递的值之间的关系的处理规则。为减少v2x消息的包大小,发送器可以利用简单的且仅需较少开销来实现的处理规则。为了为待传递的数据字段值求取以bit为单位的数据大小,以有利的方式充分利用数据大小与待传递的值之间具有以2为底的对数的数学关系
9.数据大小=log2(待传递的值)
10.作为处理规则。在此,该处理规则能够用于v2x消息的所有待传递的数据字段,针对这些数据字段应传递的不是整个值域而是来自该值域的一个具体值。相对于具有完整包大小的消息以这种方式能够将包大小减少约25%,在具有完整包大小的消息中数据字段的整个值域被传输,或者在带有完整包大小的消息中替代于传输整个值域地传输如下附加的数据字段:在该数据字段中包含有各个数据字段的长度。如果发送器已知哪些上下文信息对于接收器来说是已知的,则所提出的该实施方式有利地能够被该发送器使用。
11.在另一实施方式中,发送器向至少一个接收器传递至少一个具有完整包大小的v2x消息。该发送器通过如下方式传递具有经减少的包大小的另外的v2x消息:该发送器基于上下文信息应用包括数据大小与待传递的值之间的关系的处理规则。发送器可以执行一次对具有完整包大小的v2x消息的传递,或不时地周期性重复,并在对具有完整包大小的v2x消息的传递之后或在对具有完整包大小的v2x消息的周期性传递之间传递具有经减少的包大小的另外的v2x消息。在此,借助于在上文中所提及的处理规则能够减少包大小。
12.所提出的该实施方式尤其有利地适用于:发送器不知道哪些上下文信息对于所述至少一个接收器来说是已知的。例如因为接收器是根据内部和外部的传感器生成上下文信息,而非基于已由发送器所传递的、对所接收到的v2x消息的第一数据字段所进行的分析处理。在此,接收器的视场可能由于传感器而对发送器来说是未知的。在这种情况下,如果发送器仅仅向接收器传递一次具有完整包大小(而因此具有完整的上下文信息)的v2x消息然后再传递具有经减少的包大小的另外的v2x消息,则有利地是充分的。数据传输量以这种方式不被不必要地提高。
13.此外,所提出的该实施方式尤其有利地适用于:存在多个接收器并且发送器不知道哪些接收器是新出现的。在这种情况下,发送器能够不时地周期性重复传递具有完整包大小的v2x消息,并在所述周期性的重复之间又传递具有经减少的包大小的v2x消息。因此,数据传输量不被不必要地提高并且发送器能够独立于接收器的数量地交换v2x消息,并且有利地独立于:不必在真正通信前与每个单个的接收器都建立可信的连接。在新出现的接收器的情况下,也能够接受即时的通信。因此,所提出的v2x通信网络能够在通信参与者的数量方面实现最大的灵活性。
14.在另一实施方式中,解码在接收v2x消息期间进行。所述至少一个接收器在解码的同时基于上下文信息执行对v2x消息的验证,该验证包括对v2x消息的内容在逻辑不一致性方面进行检查。基于对v2x消息的内容所进行的验证来产生用于处理或消除该v2x消息的指令,并针对该v2x消息实施该指令。
15.有利地,不需要对v2x消息首先进行完全接收然后进行解码而随后根据上下文信息进行验证,而是所述解码和验证可以在接收消息期间已同时地进行。因此能够节省时间并且更迅速地产生用于处理或消除v2x消息的指令。因此,所提出的方法可以为时间节省和资源节约做出贡献。在此,在逻辑不一致性方面的检查包含在交叉验证的意义上利用v2x消
息的不同数据字段。例如,在cam消息(cam:cooperative awareness message,协同意识消息)中传递其中包含有车辆长度的长度字段和其中包含车辆的种类的车辆类型字段。若该车辆类型字段包括针对载客车的值而该长度字段的值例如对应于载重车的值,则收件人判定在该消息的内容中存在逻辑不一致性,因为经分析处理的信息既不能被明确地配属给载客车也不能被明确地配属给载重车。然后,可以将该消息标记或者说分级为不可信的或者直接消除,以便基于v2x消息的待处理的内容来保护车辆系统——尤其是车辆控制——不受未经允许的干预。
16.在另一实施方式中,利用发送器的和/或至少一个接收器的传感器单元和/或存储的地图和/或v2x消息历史和/或互联网下载用于生成上下文信息。
17.存在各种各样的能够单个地或相互结合地使用的可能性用于生成上下文信息。因此能够提供尽可能大的灵活性,并能够改善通信的和车辆系统的可靠性和安全性。在此,传感器单元可以包括集成到车辆中和/或基础设施对象中的内部传感器以及外部传感器。
18.在一种替代构型中可考虑的是通过所接收到的单独的上下文消息来产生上下文信息。
19.在另一实施方式中,由至少一个接收器对v2x消息的第一数据字段进行分析处理用于生成上下文信息。基于对该第一数据字段所进行的分析处理来产生用于处理或消除该v2x消息的指令。
20.存在各种各样的能够单个地或相互结合地使用的可能性用于生成上下文信息。因此能够提供尽可能大的灵活性,并能够改善通信的和车辆系统的可靠性和安全性。所提出的该实施方式尤其有利地适用于与通过发送器对v2x消息的包大小的减少相结合。因此如此使得发送器能够向接收器提供所需的上下文信息使用,并且在此同时地将该上下文信息限制在接收器用于进行处理所需的关键信息。
21.在另一实施方式中,v2x消息相当于cam消息——cam:cooperative awareness message、cpm消息——cpm:collective perception message(集体感知消息),或其他v2x消息。在此,该其他v2x消息可以相当于现有的v2x消息或未来的v2x消息,例如vam消息——vam:vulnerable road user awareness message(弱势交通参与者意识消息)、denm消息——denm:decentralized environmental notification message(分散式环境通知消息),或bsm消息(美国)——bsm:basic safety message(基本安全消息)。有利地能够具有经限定的消息结构地利用由此所已知的v2x消息格式。这简化了实现,并确保了稳定可靠的通信。
22.在另一实施方式中,发送器和/或接收器构造为车辆。
23.所提出的方法有利地不限于:发送器和接收器同时地构造为车辆而因此交换v2v消息。该方法能够有利地且不受限地用于发送器和接收器的不同构型,例如基础设施对象(发送器)与车辆(接收器),或人(发送器)与车辆(接收器),或车辆(发送器)与人(接收器)等。
24.根据本发明,此外还提出一种用于至少部分自动化的车辆的通信控制模块,该通信控制模块设计为用于实施所提出的用于数据传输的方法。
25.借助于该该通信控制模块提供可靠的能够实施所提出的方法的硬件。在此,该通信控制模块能够承担防火墙的功能,屏蔽非期望的消息。该通信控制模块尤其设计为用于
执行对v2x消息的验证并产生用于处理或消除v2x消息的指令以及分别直接实施该指令。替代地,该通信控制模块也可以构造为组合的硬件模块和软件模块,或者在另一替代构型中构造为软件模块。该通信控制模块同时可以集成式地包括车辆控制模块,该车辆控制模块对车辆进行真正控制,而因此具有车辆控制软件。此外同样可考虑使用单独的车辆控制模块,该车辆控制模块经由有线通信系统与该通信控制模块通信式连接,该通信控制模块从而承担通信功能:对v2x消息的解码和验证以及指令的生成,和在验证结果消极的情况下消除v2x消息,或将v2x消息具有经降低的显著性地转发给车辆控制模块,或在验证结果积极的情况下将v2x消息转发给车辆控制模块用于进行处理。该有线通信系统例如可以构造为总线系统(如can总线等)或汽车以太网。
26.在一种替代构型中,通信控制模块可以设计为用于产生用于处理或消除v2x消息的指令并在消息的验证结果不足(未通过可信度检查)的情况下直接实施用于消除v2x消息的指令。通信控制模块可以将用于处理v2x消息的指令转发给与通信控制模块——例如经由现场总线——通信式连接的车辆控制模块。
27.根据本发明,还提出一种车辆系统。该车辆系统具有至少部分自动化的车辆。
28.该至少部分自动化的车辆具有用于接收v2x消息的接收设备和所提出的、用于实施所提出的方法的通信控制模块。
29.借助于该通信控制模块提供可靠的能够实施所提出的方法的硬件。替代地,该通信控制模块也可以构造为组合的硬件模块和软件模块,或者在另一替代构型中构造为软件模块。在此,该通信控制模块能够承担防火墙的功能,屏蔽非期望的消息。该通信控制模块同时可以集成式地包括车辆控制模块,该车辆控制模块对车辆进行真正控制,而因此具有车辆控制软件。此外同样可考虑使用单独的车辆控制模块,该车辆控制模块经由有线通信系统与通信控制模块通信式连接,该通信控制模块从而承担通信功能:对v2x消息的解码和验证以及指令的生成,和在验证结果消极的情况下消除v2x消息,或将v2x消息具有经降低的显著性地转发给车辆控制模块,或在验证结果积极的情况下将v2x消息转发给车辆控制模块用于进行处理。该接收设备可以相当于天线或用于接收v2x信息的替代装置。该有线通信系统例如可以构造为总线系统(如can总线等)或汽车以太网。
30.本发明的在上文中所阐述的和/或在有利实施方式中所再现的有利构型和扩展方案可以单独使用亦或以任意相互组合使用,在例如唯一明确的相关性或不相容的替代方案的情况下除外。
附图说明
31.结合对结合示意图更详细地被阐述的实施例的以下描述,本发明的上述特性、特征和优点以及实现本发明的上述特性、特征和优点的方式和方法变得更加清楚和更加易于理解。附图示出:
32.图1:根据第一实施方式的所提出的用于数据传输的方法的流程图的示意图;
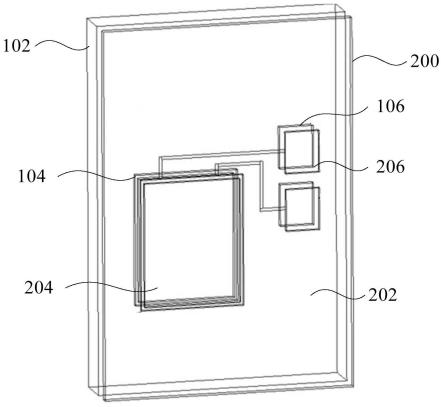
33.图2:所提出的车辆系统的第一实施方式的示意图;
34.图3:所提出的车辆系统的第二实施方式的示意图;
35.图4:在根据图2和图3的车辆系统中的、根据第二实施方式的所提出的用于数据传输的方法的流程图的示意图;
36.图5:根据第三实施方式的所提出的用于数据传输的方法的流程图的示意图;
37.图6:具有根据现有技术的包大小的v2x消息的示意图;和
38.图7:根据图5的用于数据传输的方法的、分别具有经减少的包大小的第一和第二v2x消息的示意图。
具体实施方式
39.图1示出根据第一实施方式100的所提出的用于数据传输的方法的流程图的示意图。用于数据传输的方法100能够用于v2x通信网络(v2x:vehicle-to-everything)中,该通信网络包括发送器105以及至少一个接收器115。在图1中所示出的示例中,通信网络示范性地仅具有一个接收器115。然而,通信网络可以包括多个接收器,这些接收器也可以事后添加并可以根据以下描述来构造。发送器105可以是车辆、基础设施对象(例如信号灯、移动式工地(wanderbaustelle)、道路或交通诱导标志等)、对象(例如隧道、桥等),或人。接收器115可以构造为车辆,从而如果发送器105同样构造为车辆,则可以实现车对车(v2v:vehicle to vehicle)的通信。替代地,接收器115可以构造为基础设施对象,从而如果发送器105构造为车辆则可以实现车对基础设施(v2i:vehicle to infrastructure,车对基础设施)的通信。此外,接收器115可以构造为人,从而如果发送器105构造为车辆则可以实现车对人(v2p:vehicle to pedestrian,车对行人)的通信。此外,发送器105和接收器115的其他构型也是可考虑的。
40.发送器105生成v2x消息110,并且在发送器经由传输信道120将该v2x消息110传递给接收器115之前对该v2x消息进行编码。该传输信道120例如可以构造为无线电信道,例如构造为4g-lte网络或构造为5g网络,以便在所提及的参与者之间形成无线的无线电连接。接收器115对v2x消息110进行解码并对其内容进行分析处理。编码和解码可以根据已知的方法进行而因此不作详尽阐述。尤其将不再在下文中对此进行讨论。若发送器105和接收器115例如分别构造为车辆,则v2x消息110可以相当于cam消息(cam:cooperative awareness message)或cpm消息(cpm:collective perception message)。也可考虑现有的或未来的其他v2x消息格式,例如vam消息——vam:vulnerable road user awareness message、denm消息——denm:decentralized environmental notification message,或bsm消息(美国)——bsm:basic safety message。
41.v2x消息110可以分别具有关于发送器105的和/或接收器115的周围环境的上下文信息,该周围环境是关于车辆和/或对象和/或人的周围环境。例如,上下文信息可以包括关于距离较远的车辆的数据,例如车辆类型、车速、车辆长度、加速度、质量、位置等。只要该距离较远的车辆处于直接在发送器105前方行驶的车辆的内部传感器单元的视场内并且该内部传感器单元能够检测到该距离较远的车辆,则该发送器105例如能够借助cpm消息从该直接在发送器105前方行驶的车辆获得这些上下文信息。此外,上下文信息可以包括关于该直接在发送器105前方行驶的车辆的数据,例如车辆类型、车速、车辆长度、加速度、质量、位置等。该发送器105例如能够借助cpm消息从该直接在发送器105前方行驶的车辆获得这些上下文信息。然而,该示例仅是示范性选择的,也可以在替代构型中以其他方式来实现。例如其方式是,从所获得的cpm消息或所获得的cam消息形成上下文信息。
42.以下根据图5更详细地阐述用于生成上下文信息的其他替代方案。根据图6和图7
中更详细地阐述cam消息的结构或者说构造。基于上下文信息能够针对每个v2x消息对该v2x消息进行验证和/或将该v2x消息的包大小减小。具体地说与是存在v2v通信、v2i通信还是v2p通信无关。该方法100有利地能够独立于平台地实现。
43.图2示出所提出的车辆系统200的第一实施方式的示意图。车辆系统200例如相当于图1中所示出的接收器115。车辆系统200包括至少部分自动化的车辆220。该车辆220包括接收设备205。接收设备205优选构造为天线,以便接收v2x消息,该v2x消息在当前情况下示例性是已由发送器105经由图1中的传输信道120所传递的cam消息或cpm消息。此外,车辆系统200还包括通信控制模块210,该通信控制模块设计为用于实施图1中的方法100以及以下在图4和图5中所描述的方法400、500。通信控制模块210尤其以硬件形式构造,并基于上下文信息执行对v2x消息的验证,即承担通信功能。替代地,通信控制模块210也可以构造为组合的硬件和软件模块。在此可考虑,通信控制模块210具有车辆控制模块215,该车辆控制模块包括车辆控制软件,并承担基于所接收到的且待处理的v2x消息110对车辆220的真正控制功能。
44.图3示出所提出的车辆系统300的第二实施方式的示意图。该车辆系统300以类似于图2中的车辆系统200的方式构造,即,包括具有接收设备305的至少部分自动化的车辆320。该接收设备在所示出的该示例中又构造为天线。区别于图2中的车辆系统200,图3中的车辆系统300具有单独的通信控制模块310和单独的车辆控制模块315,所述通信控制模块和车辆控制模块通过有线通信系统325相互连接。通信控制模块310可以以类似于通信控制模块210的方式构造,即,该通信控制模块能够实施图1中的方法100以及以下在图4和图5中所描述的方法400、500。通信控制模块310尤其以硬件形式构造,并基于上下文信息执行对v2x消息的验证,即承担通信功能。基于通过通信控制模块310对v2x消息所进行的验证,能够将v2x消息分级为可信的,并通过有线通信系统325转发给车辆控制模块315用于进行处理或再处理,该有线通信系统例如实现为can总线或汽车以太网。车辆控制模块315能够基于经处理或再处理的v2x消息来控制车辆320。
45.图4示出在根据图2和图3的车辆系统200、300中的、根据第二实施方式的所提出的用于数据传输的方法的流程图的示意图。即,图4示出图2和图3中的车辆系统200、300作为v2x消息110的接收器115。v2x消息例如由通信控制模块210、310在接收该v2x消息110期间被解码,并在解码的同时基于上下文信息405对该v2x消息110进行验证410。上下文信息405例如可以通过传感器单元和/或通过对来自接收器115的v2x消息的第一数据字段进行分析处理来生成。根据图5阐述用于生成上下文信息的其他可能性。这些可能性也可以用于图4中和前面的示图中。
46.基于对第一数据字段——该数据字段例如可以是速度字段或车辆类型字段等——所进行的分析处理,通信控制模块210、310能够产生用于处理或消除v2x消息的指令。若速度字段例如包括构造为大于针对载重车速度的值的、针对载客车速度的值,而车辆类型字段包括针对载重车的值,则通信控制模块210、310可以产生415用于消除该v2x消息110的指令,因为该v2x消息的内容是不可信的,即在逻辑上不一致。因此,通信控制模块210、310可以消除425该消息110,即实施420该指令。替代地,通信控制模块210、310例如可以通过设置值或者说所谓的“旗标”而将该消息110标记为不那么可信,并且仍将该消息110转发给车辆控制模块310用于进行处理或者说在通信控制模块210中进行再处理。
47.相反,若速度字段包括载客车的速度而车辆类型字段包括针对载客车的值,则通信控制模块210、310可以产生415用于处理消息110的指令并实施420该指令,因为消息110的内容是可信的,即在逻辑上一致。若通信控制模块210包括车辆控制模块215,则能够直接进行对v2x消息110的处理。否则,通信控制模块310将消息110转发430给车辆控制模块315用于进行处理。
48.在另一示例中,上下文信息405例如可以在车辆类型字段中具有针对载客车的值而在车辆长度字段和在车辆质量字段中具有载重车的长度及重量。在另一示例替代中,车辆类型字段可以具有针对载重车的值而在车辆加速度字段中具有针对载客车的值,例如针对跑车的值。所提及的示例是其他可考虑用于验证v2x消息110的各个数据字段或者说数据类型的交叉验证可能性。交叉验证无效数据或者说值(在逻辑上不一致)例如能够指示在发送器105或者说发送者处的错误(safety,安全)或者可能的攻击者(security,保障),类似于在上文中已提及的示例。在本文中所提及的两个示例中也可以由通信控制模块210、310消除消息110。否则,消息110可能对车辆系统(车辆控制模块215、315)或车辆中的功能(例如highway pilot handsfree,高速公路脱手驾驶领航)构成危险。这同样适用于在上文中所提及的如下示例:在该示例中消息110由于逻辑不一致性被消除。
49.在针对能够基于上下文信息405判定出的逻辑不一致性的替代示例中,基础设施可以作为发送器105将带有(相对于发送器105的)位置x的关于行人的对象信息作为上下文信息405传递给接收器115。车辆可以作为发送器105将具有相同的(相对于发送器105的)位置x的cam消息作为上下文信息405传递给同一接收器115。例如,如果该基础设施的相对位置和与进行发送的车辆的相对位置不同,则接收器115能够基于对所述两个消息基于上下文信息405所进行的验证例如求取:所述两个消息中的一个消息具有不正确的或不准确的信息。
50.在针对能够基于上下文信息405判定出的逻辑不一致性的另一替代示例中,车辆可以作为发送器105例如在给接收器115的消息中针对车速在车速字段中给出值200km/h作为上下文信息405。接收器115例如能够基于存储的地图数据求取:该道路拓扑结构例如由于该道路是30km/h的速度区或者存在急转弯等而根本不能够允许该速度,接收器115利用所述地图数据生成上下文信息405并且所述所述地图数据给出道路拓扑结构或道路状况。所述两个替代示例也是如此示例:在这些实例中消息在分别在完成验证后被消除。
51.图5示出根据第三实施方式500的所提出的用于数据传输的方法的流程图的示意图。在此,示范性地阐述v2v通信。然而也能够以v2i或v2p通信的形式进行通信,如在上文中所阐述的那样。发送器105,即第一车辆,例如具有内部传感器单元545。内部传感器单元545例如可以包括摄像机、雷达、激光雷达系统等。内部传感器单元545能够检测发送器105的周围环境,例如其他在前方行驶的车辆(机动车、电动自行车等)和/或基础设施对象和/或人和/或障碍物如行车道不平整、行车道上的非期望对象等。所有这些信息能够作为上下文信息505被用于生成v2x消息535、110,即在此是v2v消息,例如cam消息或cpm消息。除由内部传感器单元545所登记的数据外,上下文信息505另外还能够从外部传感器单元获得数据。此外还能够利用发送器105的存储的地图和/或互联网下载用于形成上下文信息505。还可考虑将在不同时间点的v2x消息历史用于生成上下文信息505。例如,上下文信息可以是在距离x(相对于发送器105所获得的,其中,为此例如已由于能见度差而给出低置信度)处的车
辆的轮胎部分。
52.区别于图4中的方法400,发送器105能够通过如下方式减少v2x消息110的包大小:发送器105基于上下文信息505应用包括数据大小与待传输的值之间的关系的处理规则。该处理规则符合下面的数学关系,以便求取针对数据字段(在此i)例如车辆长度字段和ii)载客车的车辆质量字段)的待传递的值(i)例如5m长度、ii)例如3000kg重量)的、以bit为单位的数据大小(i)例如6bit、ii)例如5bit):
53.数据大小=log2(待传递的值)
54.在此,log2相当于以2为底的对数。该处理规则能够用于v2x消息的所有待传递的数据字段,针对这些数据字段应传递的不是整个值域而是来自该值域的一个具体值。然而为简单起见,仅为此提及两个示例。借助于该方法,消息110的包大小(总长度)有利地能够被减少并尤其能够由发送器105在如下情况中使用:发送器105已知哪些上下文信息505对于接收器115是已知的。
55.替代地,发送器105可以向至少一个接收器115传输至少一个具有完整包大小的v2x消息110。在此,上下文信息505能够已根据上文中的阐述获得。随后,发送器105能够根据通过如下方式传输具有经减少的包大小的另外的v2x消息110:发送器基于上下文信息505应用上文提到的包括数据大小与待传输的值之间的关系的处理规则。例如,若例如由于未向接收器115传递cpm消息,发送器105不知道接收器115已知在发送器105前方行驶的车辆是载客车,则发送器105可能不是仅传递所需的用于表示载客车长度的6bit,而是传递完整的值域(还有消息110的其他字段的值)。发送器可不时地周期性重复地执行对具有完整包大小的v2x消息的传递,并在对具有完整包大小的v2x消息的传递之间传递具有经减少的包大小的另外的v2x消息,如所述的那样。若例如存在多个接收器并且发送器不知道哪些接收器是要新出现的,则发送器传递完整的值域,即具有完整包大小的v2x消息。
56.发送器105将具有经减少的包大小540的消息110传递给接收器115。接收器115在接收期间对消息110进行解码并与此同时基于上下文信息505执行验证510。关于验证的细节参考上文中对图4的阐述。尤其能够将通过接收器115的内部传感器单元545所生成的上下文信息505一起用于解码。例如,接收器的传感器单元545可能已经识别到突然置于行车道上的非期望对象(其中,例如已为此给出高置信度),例如在(相对于接收器115的)距离y处的车辆的轮胎部分。结合从消息110中读入的上下文信息505,即例如通过对来自发送器105的消息110的第一数据字段的分析处理——该数据字段例如包括车辆长度或车速或车辆类型等——接收器115能够产生指令515,该指令由通信控制模块210、310实施。由于例如轮胎部分的距离x与y不相应,而针对距离x的测量值的置信度低,但针对y的测量值的置信度高,所以可能对此存在逻辑不一致性,从而所产生的指令515包含对消息110进行消除。这由通信控制模块210、310实施,消息被消除525。
57.替代地,若两个距离x与y一致,则所生成的指令515可以包括处理或者说再处理。该指令被实施520,而消息110例如被转发530给车辆控制模块315。替代地,距离x和y可以分别给出与车辆或人员等的距离。所阐述的示例仅仅是示范性的而本发明不限于此。
58.此外,如果接收器115不仅利用消息110的所接收到的上下文信息505,而且还利用使用接收器115的内部传感器单元545所探测到的特性,则也能够对发送器105的内部传感器单元545的值域进行限制。若发送器105(车辆1)与接收器(车辆2)并排地朝同一方向行
驶,则能够对发送器105的值域显著地进行限制,因为在这种情况下仅须详细给出角度,而无须为此给出粗略的定向。
59.图6示出具有根据现有技术的包大小的v2x消息的示意图。在此,v2x消息例如相当于cam消息,因此图6示出已知的cam消息的结构600。cam消息包括头部610、第一数据数据字段615、第二数据字段620、第三数据字段625和第四数据字段630。例如,第一数据字段615构造为车速字段,第二字段620构造为车辆长度字段,第三字段625构造为车辆加速度字段,第四字段630构造为车辆质量字段。下表(表1)示出来自图6中的cam消息的片段,该片段具有各个数据字段的完整数据大小。
[0060][0061]
表1
[0062]
具有结构600的cam消息的完整包大小由各个字段的完整数据大小组成,因为所有数据带有最大值域地被传输。若要针对各个字段设定最小可能的数据大小,则必须在发送器105处和在接收器115处已知每个字段的数据大小。这导致在具有结构600的消息中的各个字段始终拥有最大的数据大小。即,针对每个字段自动探测最小可能的数据大小仅在将字段的数据大小与消息一起传输的情况下才能够实现,而这并未进行。
[0063]
cpm消息的构造是类似于cam消息地构建的。但这并未在图6中示出。cpm消息以与cam消息相同的方式拥有头部(its pdu header)。此外,cpm消息还包括第一数据字段(stationdata),第二数据字段(cpmmanagement),第三数据字段(sensorinformation)和第四数据字段(perceivedobjects)。区别于cam消息的数据字段,所述第二、第三和第四数据字段可以包括消息控制数据(cpmmanagement)、传感器数据(sensorinformation),和关于感知对象的数据(perceivedobjects)。先前在本技术中所提及的cpm消息可以具有所描述的这种结构。
[0064]
图7示出根据图5的用于数据传输的方法的、分别具有经减少的包大小的第一和第
二v2x消息的示意图。所述第一和第二v2x消息例如分别相当于cam消息。根据第一实施方式700的cam消息的结构规定,所提出的cam消息同样包括头部710。此外,该具有结构700的cam消息包括第一数据字段715、第二数据字段722、第三数据字段725和第四数据字段732。第一数据字段715构造为车速字段并例如具有如下消息的第一数据字段615的数据大小:该消息具有已知结构600。即,根据表1是14bit。仅为了一目了然起见,在图7中未示出表1中的车辆类型字段。尽管如此,图7中的具有结构700、705的cam消息仍能够分别具有车辆类型字段。第二字段722构造为车辆长度字段并由于由发送器105所执行的方法500而例如仅具有如下消息的第二字段620的数据大小的一部分:该消息具有结构600,即,当前根据表1例如仅是6bit。这例如是因为,车辆符合载客车并且车辆长度因而小于载重车的车辆长度。第三字段725构造为车辆加速度字段并具有与第三字段625相同的数据大小,根据表1例如是9bit。第四字段732构造为车辆质量字段并例如由于车辆符合载客车的事实而仅是图6中的第四字段630的一半大小,即,根据表1例如仅是5bit。
[0065]
cam消息的结构705与结构700的区别例如在于,第一数据字段717仅具有第一数据字段715的数据大小的一半大的数据大小,即,根据表1例如仅是7bit(而非14bit)。这例如是因为,车辆是载重车并且载重车的车速相对于具有消息结构700的载客车的车速更低。而作为第二字段720的车辆长度字段具有与图6中的第二字段620相同的数据大小,即,它根据表1包括10bit的数据大小。相反,作为车辆加速度字段的第三字段727构造为数据大小仅是载客车的cam消息的第三字段725的约三分之二大,即,根据表1例如是6bit(而非9bit)。相反,作为车辆质量字段的第四字段730构造为具有结构700的消息的第四字段732的两倍大,当前如表1所示例如是10bit。因此,相比于图6中的具有结构600的消息,具有结构700、705的消息分别具有经减少的包大小,即具有比图6中的消息约少25%的消息总长度。这可以在不附加添入用于待针对各个字段要设定的最小可能的数据大小的数据字段的情况下实现,具体说通过利用如所阐述的那样的上下文信息。
[0066]
已通过优选的实施例详细描述本发明。替代于所描述的实施例,可考虑其他可以具有所述特征的其他更改或组合的实施例。出于该原因,本发明不受所公开的示例的限制,因为由本领域技术人员可以从中导出另外的变型,而在此不脱离本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。