1.本发明涉及计算机视觉技术领域,特别涉及一种基于不同参数的点云粗配准方法。
背景技术:
2.点云配准是三维计算机视觉中的一个基本问题。通常采用激光扫描仪获取点云,但由于激光在物体表面不能穿透,物体表面的信息往往需要多视角、多分辨率扫描获得。随着三维激光扫描技术的发展,点云越来越容易获取,点云的容量也越来越大。因为点云的容量变大,特征描述符的维度,存储开销和计算开销是非常大的。与此同时,错误的匹配点对经常出现因为低维度的描述符产生自相似特征,配准的目的是找到最佳转换参数将它们对齐到同一坐标系下。
3.目前,点云配准技术多采用粗匹配和精配准结合的思想,粗配准为精配准提供良好的初始条件,精配准对粗匹配的结果进行优化,二者缺一不可。在精配准中,应用最为广泛的是icp(iterative closest point,迭代最近点)算法,该算法对初始位置敏感。针对这个问题,主要对粗匹配进行优化。
4.基于粗匹配的配准算法,主要是通过对点云特征的匹配。对于点云特征的提取,流行的算法有尺度不变特征转换(sift)、内在形状签名(iss)、加速稳健特征(surf)等。sift算法,对不同模型需要根据经验设置不同的参数,过程繁琐;iss算法,可快速获取点云的特征,但该算法所提取特征点数量少使得最终的匹配效率低;surf算法,过于依赖局部区域像素的梯度方向,易造成后续匹配失败。特征的匹配取决于对特征点的全面描述,典型的特征描述有旋转图像(spin image)、点特征直方图(pfh)、旋转投影统计特征(rops)、方向特征直方图(shot)。spin image描述子对非均匀采样敏感、pfh描述子的鉴别能力很强但是极为耗、rops描述子对点分布不均的数据描述性差且计算较为耗时、shot描述子对点云的分辨率敏感。上述算法存在过于依赖算法参数设置、无法准确提取点云特征点、不能全面描述特征信息等问题,这都将导致点云配准误差增大,效率降低。
技术实现要素:
5.本发明意在提供一种基于不同参数的点云粗配准方法,解决了粗匹配的配准算法效率低的问题。
6.为了达到上述目的,本发明的技术方案如下:一种基于不同参数的点云粗配准方法,包括如下步骤:
7.s1、利用体素网格法提取源点云和目标点云的三维关键点;
8.s2、对三维关键点构建32维局部描述符;
9.s3、通过描述符特征匹配建立点对;
10.s4、基于osac算法剔除错误匹配点对及求解转换参数;
11.s5、基于转换参数将源点云和目标点云配准。
12.进一步的,所述描述符的构建方法包括如下步骤:
13.s21、计算给定点的法向量夹角;
14.s22、计算步骤s21中给定点的点积;
15.s23、计算步骤s21中给定点到领域点的距离;
16.s24、计算步骤s21中给定点的曲率。
17.进一步的,所述法向量夹角的计算方法如下:
18.给定一个点p,半径为r球形领域内的点是p点的领域点,p点的协方差矩阵可表示为:
[0019][0020]
其中是点p的所有领域点的质心;
[0021]
考虑到特征值,公式(1)则表示为如下:
[0022][0023]
其中,c的最小特征值对应的特征向量就是p点的法向量;
[0024]
给定点pi,pk是pi的领域点,和分别是pi和pk的法向量,法向量之间的角度则表示如下:
[0025][0026]
其中的取值范围是[0,180
°
],定义为f1,在大多数情况下f1分布在0
°
到60
°
之间,因此f1被分为[0
°
,20
°
],(20
°
,40
°
],(40
°
,60
°
]和(60
°
,180
°
]。
[0027]
进一步的,假定是向量从给定点pi到领域点pk,则该点法向量和点积则表示如下,
[0028][0029]
进一步的,给定点到领域点的距离反演点云数据的特征,运用距离特征作为参数f3[0030][0031]
其中,pi是给定点,r是给定点的邻域半径,pk是pi的任一邻域点。
[0032]
进一步的,在公式(2)中,假设λ0≤λ1≤λ2,λ0描述沿曲面法向的变化,曲率值定义如下:
[0033][0034]
其中,τn(p)是点p的曲率值,若τn(p)=0,则所有点都位于平面上,若τn(p)≥3,表明此点位于一个很锋利的曲面处。
[0035]
与现有技术相比,本方案的有益效果:
[0036]
本方案通过整合1个新的描述符,描述符具有可代表点云特征的适宜维度,在匹配点云中,占用了较少的内存,匹配时间较少,配准误差小,适用于实际点云的配准。尤其是对时效性要求较高的实时配准。
附图说明
[0037]
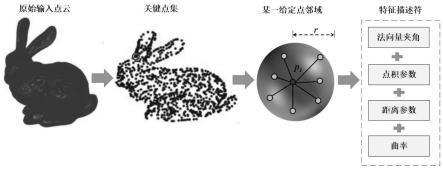
图1是本实施例中描述符构建过程的示意图;
[0038]
图2是本实施例中子特征f1和f2的示意图;
[0039]
图3是本实施例中距离特征的示意图;
[0040]
图4是本发明一种基于不同参数的点云粗配准方法的流程图;
[0041]
图5是本实施例中兔子的始点云图;
[0042]
图6是本实施例中苏家坝桥的照片;
[0043]
图7是本实施例中苏家坝桥的始点云图;
[0044]
图8是三种方法对兔子的描述符配准结果图;
[0045]
图9是三种方法对苏家坝桥的描述符配准结果图。
具体实施方式
[0046]
下面通过具体实施方式对本发明作进一步详细的说明:
[0047]
实施例
[0048]
如附图4所示,一种基于不同参数的点云粗配准方法,包括如下步骤:
[0049]
s1、利用体素网格法提取源点云和目标点云的三维关键点;本实施例中,给定一个源点云ps,对应的目标点云p
t
,第一步处理是从两个点云(即源点云ps和目标点云p
t
)中提取特征。在大多数情况下,原始输入数据集容量很大,将会导致很多计算开销。我们运用体素滤波简化点云ps和p
t
。然后我们计算ps和p
t
的特征描述,他们分别表示为和
[0050]
s2、如附图1所示,对三维关键点构建32维局部描述符;
[0051]
描述符的构建方法包括如下步骤:
[0052]
s21、计算三维关键点的法向量夹角;法向量夹角的计算方法如下:
[0053]
给定一个点p,半径为r球形领域内的点是p点的领域点,p点的协方差矩阵可表示为:
[0054][0055]
其中是点p的所有领域点的质心;
[0056]
考虑到特征值,公式(1)则表示为如下:
[0057][0058]
因为c是对称和半正定矩阵,所有的特征值λ
l
是实数,特征向量构成一个正交坐标系。我们计算得到c的所有特征值λ0,λ1和λ2,所有特征向量和其中,c的最小特征值对应的特征向量就是p点的法向量。
[0059]
给定点pi,pk是pi的领域点,和分别是pi和pk的法向量,法向量之间的角度则表示如下:
[0060]
[0061]
其中的取值范围是[0,180
°
],定义为f1,在大多数情况下f1分布在0
°
到60
°
之间,因此f1被分为[0
°
,20
°
],(20
°
,40
°
],(40
°
,60
°
]和(60
°
,180
°
]。其中子特征f1和f2的示意图如附图2所示。
[0062]
s22、计算步骤s21中给定点的点积;对于某一给定点,此点法向量与该点到邻域点向量夹角不同。因此该特征可以被描述为法向量与该点到邻域点的点间向量的夹角,假定是向量从给定点pi到领域点pk,则该点法向量和点积则表示如下,
[0063][0064]
s23、计算步骤s21中给定点到领域点的距离;某一给定点到领域点的距离反演点云数据的特征,因此,我们运用此距离特征作为参数f3,
[0065][0066]
f3的示意图如附图3所示。其中,pi是给定点,r是给定点的邻域半径,pk是pi的任一邻域点。
[0067]
s24、计算步骤s21中给定点的曲率;曲率特征是关键信息,因为它是旋转、平移和尺度不变量。曲率值反映点云平面的凹凸性。曲率值可通过协方差的特征值分析得到。
[0068]
在公式(2)中,假设λ0≤λ1≤λ2,λ0描述沿曲面法向的变化,曲率值定义如下:
[0069][0070]
其中,τn(p)是点p的曲率值,若τn(p)=0,则所有点都位于平面上,若τn(p)≥3,表明此点位于一个很锋利的曲面处。
[0071]
本实施例中τn(p)被定义为参数f4。
[0072]
如果f1属于[0
°
,20
°
],(20
°
,40
°
],(40
°
,60
°
]和(60
°
,180
°
],k1值分别被设置为1、2、3和4。如果f2<0,k2值设置为0,否则为1。如果f3<r/2,k3值设置为0,否则为1。如果f4<τ
th
,k4值设置为0,否则为1。32维描述符定义如下:
[0073]
idx=k1 k2
×
4 k3
×4×
2 k4
×4×2×2ꢀꢀꢀ
(7)
[0074]
点p属于一个特定直方图由idx值确定。对点p的邻域点做同样的操作。最后统计得到直方图。将源点云ps和目标点云p
t
执行上述同样的操作。
[0075]
s3、通过描述符特征匹配建立点对;点对匹配基于描述符,我们运用描述符欧式距离作为匹配度量,因为点云有非重叠部分,有一些点没有对应匹配点对。kd树算法被用来搜索特征空间,l2范数被用来比较描述符,一旦源点云中的所有点的点对被确定,我们最终得到一个初始匹配点集c,
[0076][0077]
其中num(c)是点集c中点对数量。
[0078]
s4、基于osac算法剔除错误匹配点对及求解转换参数;利用了osac算法去剔除错误匹配点对,提高两个点云的配准效率。在osac算法中,我们引入误差匹配度量,
[0079][0080]
其中和代表两个给定点云数据,表示
该点在p1中满足从p1到p2的距离小于给定的阈值d
τ
,是点数目,δ是一个参数用来判定p1和p2在空间上是足够近的。
[0081]
在公式(9)中,被定义为点到平面的距离,它被定义如下:
[0082][0083]
理想的情况下,将接近为0,如果p1和p2有足够重叠的部分和精确配准。经验情况下,我们设置δ=0.3。我们假定初始匹配点集是c,osac算法处理步骤如下,
[0084]
(1)我们随机选取3个非共线点对从集合中,
[0085]
(2)假定初始匹配点集是c,我们随机选择x(x≥3)个非共线点对从集合c中;
[0086]
(3)在第i次迭代中,我们运用样本点去估计旋转矩阵ri和平移向量
[0087]
(4)我们利用所求的参数转换源点云中剩余点,即其中ps是源点云;
[0088]
(5)通过公式(9)计算,其中p
t
是目标点云,我们把放入点集
[0089]
(6)重复以上步骤直到或者迭代次数大于最大迭代次数,停止迭代计算。
[0090]
s5、基于转换参数将源点云和目标点云配准。
[0091]
案例分析:
[0092]
为了评估本配准方法的性能,将本配准方法的描述符和通常使用的描述符fpfh和shot进行比较,比较过程中采用intel(r)core(tm)cpu i7-6700@3.4ghz,8g内存,64位操作系统的计算机。本案例分析中采用公开数据集与实测数据集进行分析比较,通过随机的手动旋转和平移点云,记录绕x-,y-,z-的旋转角度,平移距离作为真实值。与以往采用均方根误差不同,本案例分析选取绕x-,y-,z-的角度误差、平移误差作为衡量标准。误差值越小,匹配性能越好。最后,统计了三种方法花费的时间。注意所有的计算只在计算机一个线程上进行。
[0093]
(1)公开斯坦福点云数据集
[0094]
公开数据集兔子的数量是34834个,兔子的始点云见图5。
[0095]
(2)实测苏家坝立交桥点云数据集
[0096]
实测数据集是苏家坝立交桥点云数据,苏家坝立交位于重庆市南岸区,其连接菜园坝大桥的北桥头,是全国城市最高的匝道桥,高72米,苏家坝桥的照片见图6。
[0097]
通过leica p50三维激光扫描仪获取数据,leica p50扫描仪是一个地面三维激光扫描仪,测程是中长距离,但是噪声更小,尤其是在苛刻环境下可获得高质量点云数据。我们于2021年6月18日采集苏家坝立交的点云数据,leica p50扫描仪测站设置在桥附近,扫描精度设置为3mm@10m,苏家坝立交桥的点云见图7。苏家坝立交桥的点云数量是2469164个。
[0098]
为了验证fpfh、shot和实施例所提的描述符在x-,y-,z-的旋转角度误差和平移距离误差,图8直观展示了fpfh、shot和实施例所提的描述符配准结果。从图8可以看出,fpfh、shot和实施例所提的描述符成功配准了数据集。其中,实施例所提的描述符比fpfh和shot
配准性能更好。苏家坝立交桥的配准结果见图9,进一步表明实施例所提的描述符配准方法可以成功配准且性能更优。
[0099]
通过统计了绕x-,y-,z-的旋转角度误差和平移距离误差,从表1可以看出,实施例所采用的配准方法在两个数据集上的配准误差非常小,进一步说明本配准方法的有效性。如果进一步采用精配准,例如传统经典的icp算法,实施例所提的描述符配准结果提供了一个很好的初始位置。它将显著加快icp收敛速度。值得注意的是,实施例所采用的配准方法性能显著优于pfph和shot方法。
[0100]
表1.fpfh,shot和本配准方法在仿真和实测数据集的配准误差
[0101][0102]
三种方法在两个数据集上的配准时间见表2。值得注意的是,实施例所采用的配准方法描述符的时间最少。这主要是因为本配准方法有较小的计算维度。本配准方法维度是32维,随着描述符维度的增加,计算时间显著增加。而且,高维的描述符在匹配点对时,需要花费更多时间。
[0103]
表2.fpfh,shot和本配准方法在仿真和实测数据集的配准时间
[0104][0105]
总体来说,fpfh、shot和本配准法成功配准了公开数据集合实测数据集,本配准方法的配准误差最小,配准时间最快。本配准方法主要优势总结如下:
[0106]
(1)从精度来看,fpfh和shot是主要使用的方法在基于描述符的点云配准方法中。然而,fpfh和shot描述符的复杂性导致过长的运行时间。因此,从精度和速度来看,还有很大的提升空间。本配准方法中描述符有更低的维度、更好的描述性和更高的精度。
[0107]
(2)从运行时间来看,传统描述符例如fpfh和shot占用了更多的运行内存,本配准方法基于3d关键点,除了原始点云,只有关键点的32维描述符存储在内存中。另一方面来看,由于fpfh和shot方法描述符的高维度,需要更多的时间去匹配点对。
[0108]
以上的仅是本发明的实施例,方案中公知的具体结构和/或特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
