1.本实用新型涉及无线传输技术领域,特别涉及一种自动跟踪天线云台系统。
背景技术:
2.近年来工业无人机使用越来越广,稳定的无线数据链是无人机远距离作业的重要保证。
3.在无人机无线数据链路基本参数不改变的情况下,自动跟踪天线系统通过利用安装在云台上的高增益定向天线,来提升无线数据链的传输距离,进而使无人机的作业距离增加。
4.而针对无人机的定位,一般是需要在无人机飞行器上安装gps信息编码模块,从而使得可以方便的获取无人机的位置,但是这样需要另外设置信号传输通路以及供电通路,增加设计难度。
技术实现要素:
5.本实用新型的目的在于提供一种自动跟踪天线云台系统,解决现有技术中无人机的位置需要gps定位模块才能确定的技术问题。
6.为了实现上述目的,本实用新型提出一种自动跟踪天线云台系统,所述自动跟踪天线云台系统包括:
7.定向天线单元,用于获取无人机的飞控数据;
8.无线图传接口对接单元,具有第一端和第二端,所述无线图传接口对接单元的第一端与所述定向天线单元的通讯端连接,并用于将所述飞控数据输出;
9.协议解析单元,所述协议解析单元的第一端与所述无线图传接口对接单元的第二端连接,并通过所述飞控数据确定所述无人机的实时位置信息;
10.运动控制单元,所述运动控制单元的输入端与所述协议解析单元的第二端连接,并用于根据所述实时位置信息实现云台系统与所述无人机的对准。
11.可选地,所述自动跟踪天线云台系统还包括飞控数据与视频转发单元,所述无线图传接口对接单元还包括第三端,所述无线图传接口对接单元的第三端与所述飞控数据与视频转发单元的通讯端连接;
12.所述定向天线单元,还用于获取高清视频数据;
13.所述飞控数据与视频转发单元,用于与外部设备无线连接,并将所述高清视频数据以及所述飞控数据转换为无线传输数据输出至所述外部设备。
14.可选地,所述运动控制单元包含双轴云台和云台位置检测电路,所述云台位置检测电路的输入端为所述运动控制单元的输入端,所述云台位置检测电路的输出端与所述双轴云台电连接,所述定向天线设置于所述定向天线单元上;
15.所述云台位置检测电路,用于获取所述定向天线单元的初始方位角和初始俯仰角,并根据所述初始方位角、所述初始俯仰角以及所述实时位置信息确定所述定向天线单
元的目标方位角和目标俯仰角,并输出控制信号控制所述双轴云台实现所述定向天线的目标方位角和目标俯仰角设置。
16.可选地,所述无线图传接口对接单元的接口还包括串口、网口以及sbus 接口,所述无线图传接口对接单元通过串口、网口以及sbus接口有线连接至无线图传设备。
17.可选地,所述协议解析单元为mavlink协议解析单元。
18.可选地,所述协议解析单元的第一端通过串口与所述无线图传接口对接单元的第二端连接。
19.本实用新型通过定向天线单元获取无人机的飞控数据,无线图传接口对接单元将所述飞控数据输出,协议解析单元通过所述飞控数据确定所述无人机的实时位置信息,运动控制单元根据所述实时位置信息实现云台系统与所述无人机的对准,从而可以借助无人机现有的飞控数据就可以进行实时位置信息的确定,而无需再安装新的gps定位模块才能完成位置的确定,从而解决现有技术中无人机的位置需要gps定位模块才能确定的技术问题。
附图说明
20.下面结合附图和实施例对本实用新型进一步地说明;
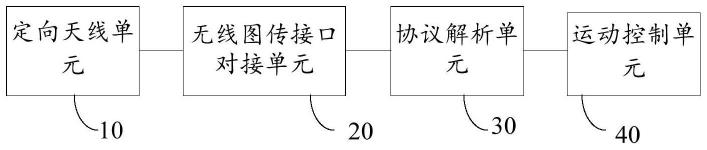
21.图1为一个实施例中自动跟踪天线云台系统的模块示意图。
22.图2为一个实施例中自动跟踪天线云台系统的模块示意图。
具体实施方式
23.本部分将详细描述本实用新型的具体实施例,本实用新型之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本实用新型的每个技术特征和整体技术方案,但其不能理解为对本实用新型保护范围的限制。
24.为了解决现有技术中无人机的位置需要gps定位模块才能确定的技术问题,本实用新型提出一种自动跟踪天线云台系统。
25.在一实施例中,如图1所示,自动跟踪天线云台系统包括定向天线单元10、无线图传接口对接单元20、协议解析单元30以及运动控制单元40,无线图传接口对接单元20具有第一端和第二端,所述无线图传接口对接单元20的第一端与所述定向天线单元10的通讯端连接,所述协议解析单元30的第一端与所述无线图传接口对接单元20的第二端连接,所述运动控制单元的输入端与所述协议解析单元30的第二端连接。
26.其中,定向天线单元10获取无人机的飞控数据,无线图传接口对接单元 20将所述飞控数据输出,协议解析单元30通过所述飞控数据确定所述无人机的实时位置信息,运动控制单元40根据所述实时位置信息实现云台系统与所述无人机的对准。基于上述实时方式,本实用新型可以借助无人机现有的飞控数据,通过协议解析单元30就可以进行实时位置信息的确定,而无需再安装新的gps 定位模块才能完成位置的确定,另外还可以通过运动控制单元40反馈控制调整定向天线单元10以实现云台系统与所述无人机的对准。从而解决现有技术中无人机的位置需要gps定位模块才能确定的技术问题。并进一步在此基础上实现了云台系统与所述无人机的实时对准,提高了信号接收的精度以及强度。
27.在一实施例中,如图2所示,所述自动跟踪天线云台系统还包括飞控数据与视频转发单元50,所述无线图传接口对接单元20还包括第三端,所述无线图传接口对接单元20的第三端与所述飞控数据与视频转发单元50的通讯端连接。
28.其中,所述定向天线单元10获取高清视频数据,所述飞控数据与视频转发单元50与外部设备无线连接,还将所述高清视频数据以及所述飞控数据转换为无线传输数据输出至所述外部设备。此时,外部设备可以为手机或电脑等便携式无线连接设备,用户可以方便的通过飞控数据与视频转发单元50建立无线连接,从而实现通过手机或电脑来控制无人机并观看实时高清视频。从而无需单独为本系统搭配无线数传电台,实现了高集成度。
29.可选地,飞控数据与视频转发单元50可以选用蓝牙芯片、wifi芯片等实现。
30.可选地,所述运动控制单元40包含双轴云台和云台位置检测电路,所述云台位置检测电路的输入端为所述运动控制单元的输入端,所述云台位置检测电路的输出端与所述双轴云台电连接,所述定向天线设置于所述定向天线单元10上。
31.其中,所述云台位置检测电路获取所述定向天线单元10的初始方位角和初始俯仰角,并根据所述初始方位角、所述初始俯仰角以及所述实时位置信息确定所述定向天线单元10的目标方位角和目标俯仰角,并输出控制信号控制所述双轴云台实现所述定向天线的目标方位角和目标俯仰角设置。需要说明的是,双轴云台可以参考两轴基座实现,云台位置检测电路可以为坐标检测电路等进行实现。
32.可选地,所述无线图传接口对接单元20的接口还包括串口、网口以及sbus 接口,所述无线图传接口对接单元20通过串口、网口以及sbus接口有线连接至无线图传设备。
33.通过多种串口,可以使得云台系统匹配多种具有不同接口的设备类型,从而可以方便的对飞控数据和实时高清视频进行观看。
34.可选地,无线图传接口对接单元20实际是由多种不同接口以及多个接口转换芯片搭载实现的无线图传接口对接单元20,其目的是为了实现不同的系统之间的数据转换。
35.可选地,所述协议解析单元30为mavlink协议解析单元30。
36.需要说明的是,mavlink协议是无人机行业应用最广发的传输协议,基于协议的解析和数据传输均有规范化标准,因此,mavlink协议解析单元30可以采用控制芯片实现,通过在控制芯片上搭载现有的解析程序既可以快速从无人机的飞控数据,通过mavlink协议解析,获得无人机的实时位置信息,再将无人机的位置信息发送给运动控制单元40。
37.可选地,所述协议解析单元30的第一端通过串口与所述无线图传接口对接单元20的第二端连接。
38.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。