1.本发明属于计算机辅助设计技术领域,具体涉及一种基于ug nx软件的冰箱内胆冲孔装备参数化建模及运动仿真的系统和方法。
背景技术:
2.随着计算机辅助设计技术的广泛应用,工业产品的设计更加注重智能化、系列化和模块化。ug nx软件因其强大的cad/cam/cae和参数化设计能力被广大设计人员所青睐。传统的冰箱内胆冲孔装备设计过程是通过二维图纸对零件通过简单的几何特征的堆叠进行三维建模,再利用运动仿真软件对产品运动流程进行分析,最后手动逐个将零件属性写入到装配体中。当冰箱内胆冲孔装备的零部件型号发生变化时就需要重新进行三维建模并重新搭建运动仿真模型,这无疑极大降低了产品设计生产效率。
技术实现要素:
3.本发明是为了解决传统设计方法中存在的问题,提供一种冰箱内胆冲孔装备参数化建模及运动仿真系统和方法,以期能够根据已经绘制好的一个模型,通过修改其中的驱动参数快速得到一个新的产品,并通过输入仿真参数实现运动仿真的自动化求解和产品属性信息的快速导出,从而能降低零件系列化设计和分析的门槛,实现冲孔装备零部件的系列化、标准化和通用化。
4.为了达到上述目的,本发明所采用的技术方案为:
5.本发明一种冰箱内胆冲孔装备参数化建模及运动仿真系统的的应用于ug nx平台上,并包括:零件功能设计模块、部件功能设计模块、总装功能设计模块、参数化运动仿真模块、bom提取模块;
6.所述零件功能设计模块包括:零件数据库、零件快速生成单元、零件参数修改单元;
7.所述零件数据库包含若干零件表,每个零件表对应于同一种类零件模型,所述零件表用于存储零件模型模板、零件名称、零件路径和驱动尺寸名称;每个零件表中零件模型模板均有唯一的零件编号并与所述图片数据库中的零件编号一一对应;
8.所述零件快速生成单元是先在ug nx软件平台对给定的冲孔装备零件进行三维建模,得到冲孔装备的零件三维模型;再将零件三维模型作为源模型,并根据零件的几何特征选取若干尺寸参数作为驱动参数,利用ug nx软件平台中的“表达式”功能将表达式插入零件的驱动参数中,从而得到参数化的零件模型模板;再对所述零件模型模板赋予查找功能、复制功能和导入功能,对零件模型模板的驱动参数赋予查找功能、修改功能和更新功能;
9.所述零件参数修改单元是对于已生成的参数化零件的驱动参数进行修改,以生成新的变型零件;通过在ug nx软件平台上使用选择对象控件选中相应零件,并从选中的零件中查找标记属性,然后通过标记属性找到相应驱动参数的表达式,修改零件的驱动参数后,保存并更新模型,从而实现参数化零件的驱动参数修改;
10.所述部件功能设计模块包括:部件数据库、部件快速生成单元、部件参数修改单元;
11.所述部件数据库包含若干部件表,每个部件表对应于同一种类部件模型,所述部件表用于存储部件模型模板、部件名称、部件路径和驱动尺寸名称;每个部件表中部件模型模板均有唯一的部件编号并与所述图片数据库中的部件编号一一对应;
12.所述部件快速生成单元是将所述零件快速生成单元生成的零件三维模型通过装配约束装配成部件三维模型,并将部件三维模型作为源模型,再根据部件的几何特征选取若干尺寸参数作为驱动参数,利用ug nx软件平台中的“表达式”功能将表达式插入零件的驱动参数中,再将所述部件三维模型中有约束关系零件的尺寸参数相关联后得到参数化的部件模型模板;再对所述部件模型模板赋予查找功能、复制功能和导入功能,对部件模型模板的驱动参数赋予查找功能、修改功能和更新功能;
13.所述部件参数修改单元是对于已生成的参数化部件的驱动参数进行修改,以生成新的变型部件;通过在ug nx软件平台上使用选择对象控件选中部件中的某个零件,并从选中的零件中查找标记属性,然后通过标记属性调用nxopen库函数找到相应驱动参数的表达式,以修改零件的驱动参数,并通过装配约束关系找到与选中的零件有尺寸配合约束关系的零件进行驱动参数的修改,直到完成部件中所有零件的驱动参数修改后,保存并更新模型,从而实现参数化部件的驱动参数修改;
14.所述总装功能设计模块包括:总装配体快速生成单元、总装配体参数修改单元;
15.所述总装配体快速生成单元是利用所述部件快速生成单元设计的参数化的部件模型模板,根据总装配体几何特征通过装配约束将部件模型模板装配成总装配体模型模板;再将总装配体模型模板作为源模型,根据总装配体的几何特征选取若干尺寸参数和装配距离参数作为驱动参数,利用ug nx软件平台中的“表达式”功能将表达式插入零部件和装配约束的驱动参数中,再将所述总装配体模型模板中有约束关系零部件的尺寸参数和装配距离参数相关联后得到参数化的总装配体模型模板;再对总装配体模型模板赋予查找功能、复制功能和导入功能,对总装配体模型模板的驱动参数赋予查找功能、修改功能和更新功能;
16.所述总装配体参数修改单元是对于已生成的总装配体的驱动参数进行修改,以生成新的变型总装配体;通过在ug nx软件平台上使用选择对象控件选中总装配体中的某个零件,并从选中的零件中查找标记属性,通过标记属性调用nxopen库函数找到相应驱动参数的表达式,以修改零件的驱动参数,并通过装配约束关系找到与选中的零件有尺寸配合约束关系的零件进行驱动参数的修改,直到完成总装配体中所有零件的驱动参数修改,同时通过装配参数找到与所述零件相关的装配约束参数进行修改后,保存并更新模型,从而实现参数化总装配体的驱动参数修改;
17.所述参数化运动仿真模块包括:仿真模型数据库和自动运动仿真单元;
18.所述自动运动仿真单元先对冰箱内胆冲孔装备进行运动分析,在ug nx软件平台的运动仿真模块上通过设置连杆,并在所述连杆上设置运动副,然后向所述运动副中插入运动函数,从而建立运动仿真模型模板,并存入所述仿真模型数据库中;
19.利用ug nx软件平台的journaling工具对运动仿真模型模板的运动仿真求解过程进行录制,并生成日志脚本文件,然后利用ufun库函数和nxopen c 库函数对所述日志脚
本文件进行编辑和修改,得到编译完成的dll文件,用于实现人机交互;
20.所述自动运动仿真单元从所述图片数据库中调用所述运动仿真模型模板的示意图进行展示,并从仿真模型数据库中调取所述运动仿真模型模板到ug nx软件平台的建模模块中,然后所述自动运动仿真单元对建模模块中运动仿真模型模板的驱动参数值进行参数化设置和装配位置的参数化设置;
21.所述自动运动仿真单元调用求解器对参数化设置后的运动仿真模型模板进行解算,得到运动仿真分析结果,并通过图表或者动画显示;
22.所述bom提取模块包括:属性写入单元和bom表导出单元;
23.所述属性写入单元用于对单一零件写入多个零件属性,或者对部件中多个零件批量写入多个零件属性;
24.所述bom表导出单元用于将装配体中所有属性按照零件名称分类并进行同种零件去重处理后导出到excel表格中,且所述excel表格中的属性按照加工件和购买件分为两个属性栏目。
25.本发明一种冰箱内胆冲孔装备参数化建模及运动仿真方法的特点是按如下步骤进行:
26.步骤1、在ug nx软件平台上通过建模特征命令对冰箱内胆冲孔装备零件进行建模,得到零件三维模型,再通过装配约束对所述零件三维模型进行装配后得到部件三维模型,然后通过装配约束对所述部件三维模型进行装配后得到总装配体模型模板,最后在所述总装配体模型模板中分别设置连杆和运动副,并在运动副中插入运动函数,从而建立运动仿真模型模板,并将零件三维模型、部件三维模型、总装配体模型模板分别作为各自的源模型,分类存于模型数据库中;
27.步骤2、完成对各源模型的参数化设置;
28.步骤2.1、根据设计需求选取源模型的若干几何尺寸作为驱动参数,利用ug nx平台软件中的“表达式功能”将表达式和驱动参数建立联系,表达式即为控制源模型形状和尺寸的驱动参数;
29.步骤2.2、对部件中的零件、总装配体中的部件之间的装配约束,建立尺寸关联,以使得部件和总装配体的驱动参数发生改变时,装配约束关系正确;
30.步骤3、将各个类型的模型模板,模型模板名称、驱动尺寸名称存入各自的模型数据库中;每个模型模板都具有唯一的编号并与图片数据库中的编号一一对应;所述模型模板包括:零件三维模型、部件三维模型、总装配体模型模板、运动仿真模型模板;
31.步骤4、根据选定的模型从模型数据库中获取模型的编号,并根据获取的编号从图片数据库中找到相应的模型示意图并显示;
32.步骤5、初始化一个空的当前模型文件,将模型数据库中的模型模板复制到当前模型文件所在的文件夹下,并将所述模型模板导入当前模型文件中,遍历模型模板中所有零件,并修改零件中的驱动参数表达式以修改模型模板的尺寸值,保存并更新模型模板,从而实现冰箱内胆冲孔装备的参数化建模;
33.步骤6、将所述总装配体模型模板导入当前模型文件中,遍历模型数据库中的运动仿真模型模板并导入,对所述运动仿真模型模板的驱动参数值进行参数化设置和装配位置的参数化设置,并调用求解器对参数化设置后的运动仿真模型模板进行解算,得到运动仿
真分析结果并导出;
34.步骤7、向零件模型或者部件中的多零件写入属性信息;
35.在ug nx软件平台上选中模型数据库中的零件或者部件,通过nxopen::blockstyler::selectobject函数选择需写入属性的零件,然后通过nxopen::blockstyler::gettaggetobject函数获得所选择写入零件的tag值,遍历所有零件,并通过nxopen::blockstyler::getstring函数获取用户输入的属性值,最后通过uf_attr_assign函数将用户所输入的属性值写入到所选择的零件中;
36.步骤8、将所选择的装配体中所有属性按照零件名称分类并进行同种零件去重处理后导出到excel表格中,且所述excel表格中的属性按照加工件和购买件分为两个属性栏目。
37.本发明所述的冰箱内胆冲孔装备参数化建模及运动仿真方法的特点也在于,所述步骤4是基于ufun和nxopen c 二次开发工具并按如下过程进行:
38.步骤4.1通过getenvironmentvariablevalue函数获取用户环境变量的路径即项目路径,并由所述项目路径获取模型数据库和图片数据库的路径,使用mfc库的_finddata_t类搜索所述模型数据库的文件夹下的.part结尾文件作为模型模板文件并切分其文件名,通过nxopen::blockstyler::tree*树列表控件将所有模型模板的文件名显示在对话框的树列表中;
39.步骤4.2由模型模板的文件名找到模型编号,再由模型编号在图片数据库中找到对应模型示意图,通过nxopen::blockstyler::drawingarea*函数将模型示意图显示在绘图显示控件中,以实现模型的预览。
40.所述步骤5是基于ufun和nxopen c 二次开发工具并按如下过程进行:
41.步骤5.1、选中树列表中的模型模板的文件名,通过getcolumndisplaytext函数获取模型名称,并通过模型名称和getenvironmentvariablevalue函数获取模型所在路径,在模型路径中查找模型文件并通过copyfile函数将模型文件复制到所述空的当前模型文件所在文件夹下,通过addcomponent函数将模型文件放置到指定位置;
42.步骤5.2、从表达式控件中通过getvalue函数获取表达式值,并通过children()函数遍历模型模板的所有零件得到其组件指针,从而根据所述组件指针找到标记属性名,并根据标记属性名使用getintegerattribute函数查找每个零件的属性值,并将组件指针和属性值存入map工具类中;
43.步骤5.3、根据所述组件指针通过prototype函数找到其部件指针;并将所述组件指针的所有部件指针存入容器之后,遍历每一个部件指针,通过expressions函数找到对应部件的所有表达式,再通过findobject函数找到对应部件的驱动参数表达式,并通过setvalue函数修改对应部件的主动参数表达式,从而实现模型的变型与更新。
44.所述步骤6是基于日志二次开发方法和nxopen c 二次开发工具并按如下过程进行:
45.步骤6.1、通过copyfile函数将所述总装配体模型模板导入当前模型文件中,通过applicationswitchimmediate函数将ug nx平台软件从建模模块切换到运动仿真模块,通过loadsimulation函数自动加载运动仿真文件,然后通过initializemechanism函数初始化仿真参数;
46.步骤6.2、使用createsolutionbuilder函数创建解算构造器,通过setrighthandside函数和setstep函数分别设置运动仿真的时间和步数;从用户界面的回调函数中通过path函数获取路径,通过exporttomovie函数将仿真动画导出到指定路径。
47.与已有技术相比,本发明的有益效果体现在:
48.1、本发明采用零件参数化设计模块、部件参数化设计模块和总装设计模块对冰箱内胆冲孔装备的系列化零部件进行参数化设计,设计人员只需输入若干驱动参数即可完成系列化零部件的快速建模,还可以通过对话框输入驱动参数对已建立的模型进行尺寸修改,减少了大量的重复性工作,极大提高了设计效率和质量,并且降低了产品生产成本。
49.2、本发明采用零件参数化设计模块,运用模块化设计思想对零部件按照结构相关性和功能相关性进行合理分类,并且各类零部件的设计过程独立进行,互不影响。零件参数化设计模块改变了传统的从二维到三维,从无到有的零件设计方法,设计人员只需建立零件数据库,输入驱动尺寸值即可快速得到新的系列化的零件,从而提高了产品设计的效率。
50.3、本发明采用部件参数化设计模块,对于部件装配体需要修改尺寸的若干零件,在修改部件中某个零件之后,会自动查找部件中与当前零件有装配约束关系的零件族,遍历该零件族修改零件族中的零件的所有驱动尺寸,保存并更新模型。这种设计方式,保证了部件中零件尺寸的适配性,根据零件间的装配约束关系实现对零件尺寸的批量修改,实现了在部件装配体中快速修改零件尺寸以达到系列化部件的快速建立。
51.4、本发明采用的bom提取模块,针对已生成的部件装配体或者总装配体,可以批量对其中的若干零件写入属性,将装配体中所有属性按照零件名称分类并进行同种零件去重导出到excel表格中,并将属性按照加工件和购买件分为两个属性栏;极大的提高了产品信息管理效率,缩短了产品生产时间。
附图说明
52.图1为本发明系统模块化设计总体结构图;
53.图2为本发明系统结构示意图;
54.图3为本发明参数化设计流程图;
55.图4为本发明运动仿真模块流程图;
56.图5为本发明属性填写模块流程图;
57.图6为本发明bom提取模块流程图;
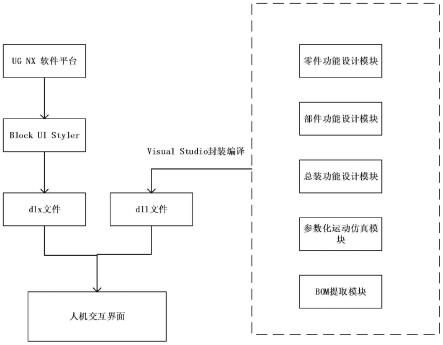
58.图7为本发明系统架构图。
具体实施方式
59.本实施例中,一种冰箱内胆冲孔装备参数化建模及运动仿真系统,如图7所示,是通过visual studio编译平台将零件功能设计模块、部件功能设计模块、总装功能设计模块、参数化运动仿真模块、bom提取模块、数据库封装成dll(动态链接库)程序,并与ugnx平台提供的block ui styler用户界面编辑器提供的dlx(对话框文件)相交互,实现友好的可视化的人机交互操作。
60.如图1和图2所示,零件功能设计模块包括:零件数据库、图片数据库、零件快速生成单元、零件参数修改单元;
61.零件数据库包含若干零件表,每个零件表对应于同一种类零件模型,零件表用于存储零件模型模板,零件名称,零件路径和驱动尺寸名称;每个零件表中零件模型模板都具有唯一的零件编号并与图片数据库中的零件编号一一对应。
62.零件快速生成单元是先在ug nx软件平台对给定的冲孔装备零件进行三维建模,得到冲孔装备的零件三维模型;再将零件三维模型作为源模型,并根据零件的几何特征选取其中的若干尺寸参数作为驱动参数,利用ug nx中的“表达式”功能将表达式插入零件的驱动参数中得到参数化的零件模型模板;再针对零件模型模板进行相应参数化功能的编程,从而得到具有模型模板的查找功能、复制功能和导入功能,以及驱动参数的查找功能、修改功能和更新功能的参数化程序;
63.零件参数修改单元是对于已经生成的参数化零件,可以重新对其驱动参数进行反复修改,以生成新的变型零件。通过在ug nx平台上使用选择对象控件选中零件,从零件中查找标记属性,通过标记属性找到相应驱动参数修改程序,打开相应驱动参数修改对话框,找到相应的驱动参数表达式,修改零件的驱动参数,保存并更新模型,从而实现参数化零件的驱动参数修改。
64.部件功能设计模块包括:部件数据库、部件快速生成单元、部件参数修改单元;
65.部件数据库包含若干部件表,每个部件表对应于同一种类部件模型,部件表用于存储部件模型模板,部件名称,部件路径和驱动尺寸名称;每个部件表中部件模型模板都具有唯一的部件编号并与图片数据库中的部件编号一一对应。
66.部件快速生成单元是先在ug nx软件平台对给定的冲孔装备零件进行三维建模,得到冲孔装备的零件三维模型,然后通过装配约束将零件模型装配成部件模型,再将部件三维模型作为源模型,根据部件的几何特征选取其中的若干尺寸参数作为驱动参数,利用ug nx中的“表达式”功能将表达式插入需要参数化零件的驱动参数中,再将部件模型中有约束关系零件的尺寸参数相关联得到参数化的部件模型模板;再针对部件模型模板进行相应参数化功能的编程,从而得到具有模型模板的查找功能、复制功能和导入功能,以及驱动参数的查找功能、修改功能和更新功能的参数化程序;
67.部件参数修改单元是对于已经生成的参数化部件,可以重新对其驱动参数进行反复修改,以生成新的变型部件。通过在ug nx平台上使用选择对象控件选中部件中的某个零件,从零件中查找标记属性,通过标记属性找到相应驱动参数修改程序,打开相应驱动参数修改对话框,找到相应的驱动参数表达式,修改零件的驱动参数,并且通过装配约束关系找到与该零件有约束关系的零件,如有尺寸配合关系,修改对应的驱动参数,直到对部件中所有参数化零件实现参数修改,保存并更新模型,从而实现参数化部件的驱动参数修改。
68.总装功能设计模块包括:总装配体快速生成单元、总装配体参数修改单元;
69.总装配体快速生成单元是利用部件快速生成单元设计的参数化的部件模型模板,根据总装配体几何特征通过装配约束将部件模型模板装配成总装配体模型模板;再将总装配体模型模板作为源模型,根据总装配体的几何特征选取其中的若干尺寸参数和装配距离参数作为驱动参数,利用ugnx中的“表达式”功能将表达式插入零部件和装配约束的驱动参数中,再将总装配体模型模板中有约束关系零部件的尺寸参数和装配距离参数相关联得到参数化的总装配体模型模板;再针对总装配体模型模板进行相应参数化功能的编程,从而得到具有模型模板的查找功能、复制功能和导入功能,以及驱动参数的查找功能、修改功能
和更新功能的参数化程序;
70.总装配体参数修改单元是对于已经生成完成的总装配体,可以重新对其驱动参数进行反复修改,以生成新的变型总装配体。通过在ug nx平台上使用选择对象控件选中总装配体中的某个零件,从零件中查找标记属性,通过标记属性找到相应驱动参数修改程序,打开相应驱动参数修改对话框,找到相应的驱动参数表达式,修改零件的驱动参数,并且通过装配约束关系找到与该零件有约束关系的零件,如有尺寸配合关系,修改对应的驱动参数,直到对部件中所有参数化零件实现参数修改,同时通过装配参数查找找到部件相关的装配约束参数并修改,保存并更新模型,从而实现参数化总装配体的驱动参数修改。
71.参数化运动仿真模块包括:仿真模型数据库,图片数据库和自动运动仿真单元。
72.自动运动仿真单元先对冰箱内胆冲孔装备进行运动分析,在ug nx运动仿真模块通过设置连杆,在连杆上设置运动副,向运动副中插入运动函数从而建立运动仿真模型模板,并将其放入仿真模型数据库中,然后利用ug的journaling工具对运动仿真求解过程进行录制,生成日志脚本文件,并利用ufun和nxopen c 库函数对脚本文件进行编辑和修改,将编译完成的dll文件与对话框文件(dlx)相结合,实现应用程序的人机交互。
73.运动仿真模块运行后,用户界面自动从图片数据库中调用运动仿真模型示意图,并从仿真模型数据库中将运动仿真三维模型导入当前工作界面中,根据从用户界面获取的驱动参数值自动完成前处理设置,包括三维模型参数化、装配位置参数化,应用程序将ug nx系统由建模模块自动转到运动仿真模块,并自动调用求解器进行解算,求解完成后,用户可以通过图表或者动画来查看运动仿真分析结果。
74.bom提取模块包括:属性写入单元和bom表导出单元。
75.属性写入单元用于对单一零件写入多个零件属性,或者对部件中多个零件批量写入多个零件属性。
76.bom导出单元用于将装配体中所有属性按照零件名称分类并进行同种零件去重导出到excel表格中,并将属性按照加工件和购买件分为两个属性栏;
77.本实施例中,一种基于ug nx软件冰箱内胆冲孔装备参数化建模及运动仿真方法,是按照如下步骤进行:
78.步骤1、在ugnx软件平台上对冰箱内胆冲孔装备零件通过建模特征命令得到零件模型,对零件模型通过装配约束进行装配得到部件模型,对部件模型通过装配约束进行装配得到总装配体模型,对总装配体通过设置连杆、设置运动副、向运动副插入运动函数建立运动仿真模型,作为各自的源模型,并分类存于数据库中;
79.步骤2、完成对各源模型的参数化设置;
80.步骤2.1、根据设计需求选取源模型的若干几何尺寸作为驱动参数,利用ug nx软件中的“表达式功能”将表达式和驱动参数建立联系,表达式即为控制源模型形状和尺寸的驱动参数,如图3所示;
81.步骤2.2、对部件中的零件、总装配体中的部件之间的装配约束,建立尺寸关联,用于保证部件和总装配体的驱动参数发生改变时,装配约束关系不会发生错误。
82.步骤3、将各个类型的模型模板,模型名称、驱动尺寸名称存入各自的数据库中;每个模型模板都具有唯一的编号并与图片数据库中的编号一一对应。
83.步骤4、根据选定的模型从相应的模型数据库中获取模型的编号;根据获取的编号
从图片数据库中找到相应的模型示意图并显示;
84.具体实施中,步骤4是基于ufun和nxopen c 二次开发工具并按如下过程进行:
85.步骤4.1通过getenvironmentvariablevalue函数获取用户环境变量的路径即项目路径,并由项目路径获取模型数据库和图片数据库的路径,使用mfc库的_finddata_t类搜索模型数据库的文件夹下的.part结尾文件作为模型模板文件并切分其文件名,通过nxopen::blockstyler::tree*树列表控件将所有模型模板的文件名显示在对话框的树列表中;
86.步骤4.2由模型模板的文件名找到模型编号,再由模型编号在图片数据库中找到对应模型示意图,通过nxopen::blockstyler::drawingarea*函数将模型示意图显示在绘图显示控件中,以实现模型的预览。
87.步骤5、打开一个空的模型文件,访问模型数据库中的模型模板,将模型模板复制到当前工作部件文件夹下,然后将模型模板导入当前工作部件中,遍历模型所有零件,修改零件中的驱动参数表达式从而修改模型的尺寸值,保存并更新模型,以实现冰箱内胆冲孔装备的快速参数化建模。
88.具体实施中,步骤5是基于ufun和nxopen c 二次开发工具并按如下过程进行:
89.步骤5.1、选中树列表中的模型模板的文件名,通过getcolumndisplaytext函数获取模型名称,并通过模型名称和getenvironmentvariablevalue函数获取模型所在路径,在模型路径中查找模型文件并通过copyfile函数将模型文件复制到空的当前模型文件所在文件夹下,通过addcomponent函数将模型文件放置到指定位置;
90.步骤5.2、从表达式控件中通过getvalue函数获取表达式值,并通过children()函数遍历模型模板的所有零件得到其组件指针,从而根据组件指针找到标记属性名,并根据标记属性名使用getintegerattribute函数查找每个零件的属性值,并将组件指针和属性值存入map工具类中;
91.步骤5.3、根据组件指针通过prototype函数找到其部件指针;并将组件指针的所有部件指针存入容器之后,遍历每一个部件指针,通过expressions函数找到对应部件的所有表达式,再通过findobject函数找到对应部件的驱动参数表达式,并通过setvalue函数修改对应部件的主动参数表达式,从而实现模型的变型与更新。
92.步骤6、打开总装配体模型,访问仿真模型数据库中的运动仿真模型并导入,对运动仿真前处理参数进行设置,实现运动仿真的自动化求解和求解结果的自动导出,如图4所示。
93.具体实施中,步骤6是基于日志二次开发方法和nxopen c 二次开发工具并按如下过程进行:
94.步骤6.1、通过copyfile函数将总装配体模型模板导入当前模型文件中,通过applicationswitchimmediate函数将ug nx平台软件从建模模块切换到运动仿真模块,通过loadsimulation函数自动加载运动仿真文件,然后通过initializemechanism函数初始化仿真参数;
95.步骤6.2、使用createsolutionbuilder函数创建解算构造器,通过setrighthandside函数和setstep函数分别设置运动仿真的时间和步数;从用户界面的回调函数中通过path函数获取路径,通过exporttomovie函数将仿真动画导出到指定路径。
96.步骤7、向零件模型或者部件中的多零件写入属性信息。
97.在ug nx平台上打开模型数据库中的零件或者部件,通过
98.nxopen::blockstyler::selectobject选择需要写入属性的零件,然后通过
99.nxopen::blockstyler::gettaggetobject获得零件的tag值,遍历所有零件,进入零件工作环境,通过nxopen::blockstyler::getstring从对话框获取用户输入的属性值,通过uf_attr_assign将属性写入到零件中,如图5所示。
100.步骤8、选中模型,将装配体中所有属性按照零件名称分类并进行同种零件去重导出到excel表格中,并将属性按照加工件和购买件分为两个属性栏,如图6所示;
101.实践证明,本发明能够极大提升产品生产效率,大幅降低新的系列化产品的设计成本。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。