1.本发明涉及微创血管介入手术技术领域,更具体的说是涉及一种介入无人手术室系统。
背景技术:
2.心脑血管微创介入疗法是针对心脑血管疾病的主要治疗手段。和传统外科手术相比,有着切口小、术后恢复时间短等明显优势。心脑血管介入手术是由医生手动将导管、导丝以及支架等器械送入病患体内来完成治疗的过程。
3.介入手术存在以下问题:首先,在手术过程中,由于dsa会发出x射线,医生体力下降较快,注意力及稳定性也会下降,将导致操作精度下降,易发生因推送力不当引起的血管内膜损伤、血管穿孔破裂等事故,导致患者生命危险。其次,长期电离辐射的积累伤害会大幅地增加医生患白血病、癌症以及急性白内障的几率。医生因为做介入手术而不断积累射线的现象,已经成为损害医生职业生命、制约介入手术发展不可忽视的问题。
4.通过使用机器人技术,可以使得在无需人工参与的情况下,机器人能完成介入手术的操作过程,有效的解决上述的问题。当然在机器人自动完成手术过程中,人工进行监测其操作过程还是必须的。多种机器人通过相互配合,完成整个介入手术过程,建立介入无人手术室是未来发展的趋势。
5.而现阶段介入手术中的存在如下几个方面的问题:(1)在介入手术中,从穿刺过程,手术中对导管导丝的控制、对患者的转运、对耗材的递送、对造影剂的注射,对手术器械的更换,对图像的分析等等,所有的手术过程都需要医生的亲自动手,医生压力大、任务重;(2)医生长期穿着铅衣对身体骨骼和肌肉有严重的损伤;(3)医生长期接受dsa辐射的伤害,对身体健康有严重影响;(4)导管室使用频繁,清洁常会出现问题;(5)对患者的转运常常需要较多的人力资源;(6)人工对导管导丝的控制精度不高,手术效率不高等。
6.因此,如何提供一种介入无人手术室系统,是本领域技术人员亟需解决的问题。
技术实现要素:
7.本发明旨在至少在一定程度上解决现有技术中的上述技术问题之一。
8.为此,本发明的目的在于提出一种介入无人手术室系统,首先解决上述问题1-3和6。
9.本发明提供了一种介入无人手术室系统,包括:
10.导管室,所述导管室为介入手术的区域,其内具有导管床;
11.控制室,紧邻所述导管室设置有所述控制室,所述导管室和所述控制室之间设置有观察窗口;
12.机器人,所述导管室内部具有相互配合工作的介入手术机器人,主控机器人,穿刺机器人,更换导管导丝机器人;所述导管床上安装有dsa装置和造影剂注射装置;
13.监控装置,所述控制室内设置有与上述机器人、dsa装置和造影剂注射装置通信连
接的所述监控装置,用于展示各个设备及机器人的信息,实时同步更新,用于医生进行监督;以及
14.控制器,所述控制室内设有控制器,用于医生和机器人之间的人机交互。
15.经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种介入无人手术室系统,将导管室、控制室紧邻设计,并在导管室内布置多个不同功能、且相互配合工作的机器人,以及导管床上安装有dsa装置和造影剂注射装置,配合完成手术,至少包括图像诊断、手术穿刺、置入导管导丝、导管导丝的更换、导管导丝的移动、血管造影等操作,提高了操作精度,控制室内设置监测各状态信息的监测装置及医生和机器人之间的人机交互的控制器,由此实现了人工监测,机器人组合实现无人介入手术的目的,解决了介入手术医生压力大、任务重的问题,医生在控制室内无需长期穿着铅衣,同时避免了长期接受dsa辐射的伤害,降低了介入手术对医生身体健康的影响。
16.进一步地,所述导管室附近具有病房,用于供患者休息。
17.进一步地,所述病房和所述导管室之间移动有自动转运车,用于自动转运患者。解决了问题5,对患者的转运无需较多的人力资源。
18.进一步地,所述病房内固定有转运车充电桩,用于供所述自动转运车充电。
19.进一步地,所述机器人还包括耗材递送机器人,所述耗材递送机器人记录手术耗材信息,用于将手术耗材送至所述导管室,其与所述监控装置和控制器通信连接。
20.进一步地,所述机器人还包括快速充电机器人,所述快速充电机器人与多个机器人通信连接,用于更换电量低的电池。
21.进一步地,所述导管室外部设置有为更换下来电量低的电池充电的充电区域,所述充电区域内设置有供所述快速充电机器人的充电位置。
22.进一步地,还包括与所述控制器通信连接的清扫机器人,所述清扫机器人用于手术结束后对所述导管室内进行自动清扫。解决了问题4,无需人力频繁清洁导管室,提高清洁效率。
23.进一步地,所述监控装置包括多个显示屏幕,通过屏幕支架支撑。
24.进一步地,所述机器人的权限具有优先级,所述主控机器人具有最大权限,是手术的指导员,用于图像诊断,指示其他机器人配合工作。
附图说明
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
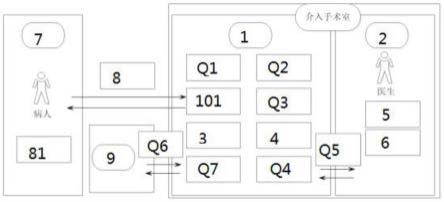
26.图1示意出了介入无人手术室系统整体布局图;
27.图2示意出了介入无人手术室系统在导管室内布局图;
28.图3示意出了介入无人手术室系统流程图;
29.图4示意出了主控机器人结构示意图;
30.图5示意出了主控机器人的手指装置的结构示意图;
31.图6示意出了主控机器人的手指装置爆炸示意图;
32.图7示意出了穿刺机器人结构示意图;
33.图8示意出了穿刺机器人第一手指装置的结构示意图;
34.图9示意出了穿刺机器人第二手指装置的结构示意图;
35.图10示意出了更换导丝导管机器人结构示意图;
36.图11示意出了更换导丝导管机器人的手臂装置和头部的结构示意图;
37.图12示意出了更换导丝导管机器人的手臂装置俯视图;
38.图13示意出了更换导丝导管的示意图;
39.图14示意出了快速充电机器人结构示意图;
40.图15示意出了快速充电机器人抓取推送机构结构示意图;
41.图16示意出了耗材递送机器人结构示意图;
42.图17示意出了耗材递送机器人手臂组件结构示意图;
43.图18示意出了清扫机器人结构示意图;
44.图19示意出了清扫机器人底座装置结构示意图;
45.图20示意出了自动转运车的结构示意图;
46.图21示意出了自动转运车底部结构示意图;
47.图22示意出了自动转运车的自动充电和固定装置的结构示意图;
48.图23示意出了监控装置结构示意图。
49.主要附图标记如下:
50.1-导管室,101-导管床,2-控制室,201-观察窗口,3-dsa装置,4-造影剂注射装置,5-监控装置,51-显示屏幕,52-屏幕支架,6-控制器,7-病房,8-自动转运车,81-转运车充电桩,9-充电区域,q1-介入手术机器人,q2-主控机器人,q3-穿刺机器人,q4-更换导管导丝机器人,q5-耗材递送机器人,q6-快速充电机器人,q7-清扫机器人。
具体实施方式
51.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
52.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
53.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
54.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情
况理解上述术语在本发明中的具体含义。
55.由于现阶段介入手术存在背景技术中指出的多个问题,因此本发明实施例公开了一种介入无人手术室系统,参见附图1-3,包括:
56.导管室1,所述导管室1为介入手术的区域,其内具有导管床101;
57.控制室2,紧邻所述导管室1设置有所述控制室2,所述导管室1和所述控制室2之间设置有观察窗口201;
58.机器人,所述导管室1内部具有相互配合工作的介入手术机器人q1,主控机器人q2,穿刺机器人q3,更换导管导丝机器人q4;所述导管床101上安装有dsa装置3和造影剂注射装置4;
59.监控装置5,所述控制室2内设置有与上述机器人、dsa装置3和造影剂注射装置4通信连接的所述监控装置5,用于展示各个设备及机器人的信息,实时同步更新,用于医生进行监督;以及
60.控制器6,所述控制室2内设有控制器6,用于医生和机器人之间的人机交互。
61.本发明公开提供了一种介入无人手术室系统,将导管室、控制室紧邻设计,并在导管室内布置多个不同功能、且相互配合工作的机器人,以及导管床上安装有dsa装置和造影剂注射装置,配合完成手术,至少包括图像诊断、手术穿刺、置入导管导丝、导管导丝的更换、导管导丝的移动、血管造影等操作,提高了操作精度,控制室内设置监测各状态信息的监测装置及医生和机器人之间的人机交互的控制器,由此实现了人工监测,机器人组合实现无人介入手术的目的,解决了介入手术医生压力大、任务重的问题,医生在控制室内无需长期穿着铅衣,同时避免了长期接受dsa辐射的伤害,降低了介入手术对医生身体健康的影响。
62.在本发明的一个实施例中,所述导管室2附近具有病房7,用于供患者休息。优选病房与导管室相对布置。
63.在本发明的一个实施例中,所述病房7和所述导管室1之间移动有自动转运车8,用于自动转运患者;由此无需耗费大量的人力对患者进行转运。
64.有利的是,所述病房7内固定有转运车充电桩81,用于供所述自动转运车8充电。
65.在本发明的一个实施例中,所述机器人还包括耗材递送机器人q5,所述耗材递送机器人q5记录手术耗材信息,用于将手术耗材送至所述导管室1,其与所述监控装置5和控制器6通信连接。
66.在本发明的一个实施例中,所述机器人还包括快速充电机器人q6,所述快速充电机器人q6与多个机器人通信连接,用于更换电量低的电池;由此解决了机械人电池电量低无法及时补充的问题。
67.有利的是,所述导管室1外部设置有为更换下来电量低的电池充电的充电区域9,所述充电区域9内设置有供所述快速充电机器人q6的充电位置。
68.在本发明的另一些实施例中,还包括与所述控制器6通信连接的清扫机器人q7,所述清扫机器人q7用于手术结束后对所述导管室1内进行自动清扫。由此无需人力频繁清洁导管室,提高清洁效率。
69.更有利的是,所述监控装置5包括多个显示屏幕51,通过屏幕支架52支撑。
70.上述各实施例中,所述机器人的权限具有优先级,所述主控机器人q2具有最大权
限,是手术的指导员,用于图像诊断,指示其他机器人配合工作。
71.在本发明的一个具体的实施例中,介入无人手术室的布局,可以分为四个空间。在病房中,安装有转运车充电桩。在充电区,有充电装置。在导管室中,有介入手术机器人、导管床、dsa装置、清扫机器人、主控机器人、穿刺机器人、造影剂注射装置、更换导丝导管机器人、在控制室中,有监控装置、控制器。其中,还有几个机器人是不同区域中活动的。他们分别是自动转运车,在病房和导管室之间活动。快速充电机器人,在充电区和导管室之间活动。耗材递送机器人,在导管室和控制室之间活动。
72.参见附图2,在导管室1内,观察窗口201采用铅玻璃,便于控制室用于观察导管室。导管床101安装在导管室1的中央,dsa装置3安装在导管床101的床头,主控机器人q2活动在导管床101的左侧。自动转运车8进入导管室后,停止导管床101的右侧,待患者上导管床101后,自动转运车8会退出导管室,在门口等候。介入手术机器人q1安装在导管床101侧面的导轨上。造影剂注射装置4放置在导管床101上。清扫机器人q7、更换导丝导管机器人q4、穿刺机器人q3,分别停放在导管室的角落里。在需要时会移动出来进行工作。耗材递送机器人q5在拿取耗材后,会放置在导管床101上,然后会退出导管室外等候。
73.整个介入手术的完整流程大致如下:首先,患者在病房等候,当接受到可以进行手术的消息后,自动转运车可以进行自由移动。患者躺在自动转运车上,自动转运车根据gps指引会沿着预定的路线把患者自动运送到导管室内,停止在导管床的侧面。然后患者从转运车上移动到导管床上后,转运车自动退出导管室,停留在导管室外,等待手术结束。在患者躺好后,主控机器人会指示穿刺机器人开始动作,穿刺机器人会移动到导管床的侧面,开始逐步对患者消毒、局部麻醉、穿刺、置入外鞘等动作。动作完成后,会把消息传达给主控机器人。主控机器人开始指示dsa装置、介入手术机器人准备开动作。在主控机器人的辅助下,介入机器人配合dsa装置的图像依次完成对造影导丝、造影导管放置在患者血管的合适位置上,主控机器人指示造影剂注射装置进行注射造影剂动作,在dsa装置上就可以显示出血管的图像。调整dsa的角度,进行不同体位的成像,以便观察到更加全面的血管形态。在得到不同的血管影像后,主控机器人会根据血管的图像进行病情分析,在与大数据对比分析后,得到诊断结果。如果需要继续手术,则配合dsa装置和介入机器人进行导引导管的置入。这时,主控机器人会指示更换导丝导管机器人来辅助完成更换导丝和导管。同时,主控机器人会选择手术所需的耗材,发送给耗材递送机器人,或通过控制器发送指令,耗材递送机器人查找,在找到目标耗材后,耗材递送机器人会把手术耗材放置在导管床上,主控机器人会辅助完成把耗材安装在介入手术机器人上。然后根据dsa的图像,一步步完成对手术耗材(如支架)的推送,期间需要多次造影剂注射装置的配合。主控机器人在手术期间可以完成对dsa脚踏的控制,在一步步操作完成后,手术的治疗就顺利完成了。
74.然后,在主控机器人的辅助下,所有的导丝导管都撤出人体。主控机器人帮助患者完成包扎后。会发送消息让自动转运车进入导管室停止导管床的侧边,患者从导管床上回到转运车上,然后转运车会带着患者返回病房,停止到位。
75.手术期间,所有设备的状态和数据,都会现在在控制室内的监控装置上,医生可以全程监督手术的进行,一旦发现有任何异常,可以随时通过控制器暂停手术,进行调整。修复完成后,可以继续手术。医生也可以使用控制器对机器人进行控制。在一台手术结束后,主控机器人会指示清洁机器人打扫导管室,或控制器发送清洁机器人打扫指令,为下一台
手术做好准备。
76.各个机器人都采用了锂电池供电,如果某个机器人当检测到电量低时,他会发送信号给快速充电机器人,快速充电机器人会携带一块充满电的锂电池移动到机器人旁边给机器人换上,并取走低电量的电池送回充电桩上进行充电。
77.上述操作流程中应用到的机器人和装置,可以为现有能够实现对应功能的机械人,个别的机器人也可以采用如下机器人,仅以个别示例阐述机器人的功能:
78.介入手术机器人q1,可以采用专利文献cn112353491a公开的一种介入造影和治疗手术通用机器人,将其连接于导管床上。
79.主控机器人q2,采用车体结构可以在导管室内移动。手术时机器人对包括dsa、导管床、其他机器人等各部件进行监视,并能通过机器学习掌握手术流程,发送指令指导各个设备进行配合动作,会把各种数据实时发送到监测系统上。手术结束后,机器人会自行移动到角落,不影响其他操作。
80.参见附图4-6,主控机器人q2包括:q2100底座装置,头部和手臂装置q2200以及手指装置q2300;所述底座装置q2100底部具有行走装置,用于移动到目标区域,其上设置有用于模拟医生脚部来控制dsa的透视和曝光动作的踏板装置;所述底座装置q2100顶部支撑有所述头部和手臂装置q2200,用于完成识别信息和对手指的定位;所述头部和手臂装置q2200的手臂端连接有所述手指装置q2300,用于手术器材的抓取、更换及安装。
81.其中,手指装置q2300包括:
82.手指连接板q2301,所述手指连接板q2301与手臂端部连接;
83.手指导轨q2303,所述手指连接板q2301底部连接有手指导轨q2303,所述手指导轨q2303上滑动有两个手指滑块;
84.手指丝杠电机q2311,所述手指丝杠电机q2311通过手指电机支架q2310固定于所述手指连接板q2301下方;
85.连接片q2304,q2309,每一个所述手指滑块上对应连接一个连接片q2304,q2309,两个所述连接片q2304,q2309上分别具有与所述手指丝杠电机q2311螺纹配合的顺时针螺纹和逆时针螺纹;在手指丝杠电机q2311转动时,2个手指q2307和q2306会进行相对运动或相反运动。
86.三维压力传感器q2305,q2308,每一个所述连接片q2304,q2309下方对应连接一个所述三维压力传感器q2305,q2308;以及
87.手指q2306,q2307,每一个所述三维压力传感器q2305,q2308下方连接一个所述手指q2306,q2307,所述手指q2306,q2307内表面为柔软的医用硅胶,可以防止损坏手术器材。
88.手指装置内安装的三维压力传感器,可以感受到抓取的力度,保证抓取的准确性。
89.有利的是,所述手指连接板q2301向外倾斜延伸形成一个手指摄像头支架,所述手指摄像头支架上至少连接一个手指摄像头q2302,所述手指摄像头302朝向所述手指q2306,q2307布置。
90.夹紧物体后,三维压力传感器q2305,q2308会感受到压力值,达到一定数值后,手指丝杠电机q2311停止运动。在抓取的过程中,手指摄像头q2302会时刻关注着物体的形态,以确保不会发送夹坏器材的情况。手指摄像头q2302用于观察手指端的环境,能够方便机器人和医生更好的观察物体的分布和准确位置。
91.值得说明的是,手术开始前,主控机器人q2会自动移动到导管床旁,监督并指导各设备的运行,负责手术中的手术器材抓取、更换等动作。手术结束后,机器人能够自动移动到角落里,不影响其他设备的使用和清洁。在第一次使用机器人前,需要进行学习和训练,目的是让机器人适应导管室的环境和熟悉当前医用使用的dsa、导管床、其他机器人等设备,学习和其他设备进行良好的配合操作。经过多次训练后,机器人会逐步掌握并记忆所学的知识,待完全学习好后,就可以正常使用机器人来进行自动手术或辅助手术了。机器人系统内本身存储有大量的手术图像和标准手术流程,以及众多异常情况的处理措施,可以在实际临床中加以使用。并且机器人有自主学习功能,能够记录并分析之后的每一次手术的情景,以便在后续手术中选择最优解决方案。
92.穿刺机器人q3,参见附图7,包括:底座装置、头部和手臂装置及穿刺手指装置,穿刺手指装置通过两个机械臂,分别连接第一手指装置q3300和第二手指装置q3400。底座装置上通过穿刺机器人主机接收信息、储存信息、处理信息及发送指令信息,第一手指装置用于穿刺手术穿刺点定位,第二手指装置用于穿刺,两者在手术中相互配合,均可对手术器材抓取、更换及安装,实现了机器人穿刺手术,提高了穿刺的准确性,进而降低由于穿刺位置不准确导致重复操作,使血管痉挛的情况发生,提高了穿刺手术的安全性。
93.具体的,参见附图8,第一手指装置q3300包括:
94.第一手指连接板q3302,所述第一手指连接板q3302与一个机械臂的端部连接;
95.第一手指导轨q3303,所述第一手指连接板q3302底部连接有第一手指导轨303,所述第一手指导轨q3303上滑动有两个第一手指滑块;
96.第一手指丝杠电机q3305,所述第一手指丝杠电机q3305通过第一手指电机支架q3304固定于所述第一手指连接板q3302下方;
97.第一连接片q3306,q3312,每一个所述第一手指滑块上对应连接一个第一连接片q3306,q3312,两个所述第一连接片q3306,q3312上分别具有与所述第一手指丝杠电机q3305螺纹配合的顺时针螺纹和逆时针螺纹;
98.第一三维压力传感器q3307,q3311,每一个所述第一连接片q3306,q3312下方对应连接一个所述第一三维压力传感器q3307,q3311;以及
99.第一手指耗材q3309,每一个所述第一三维压力传感器q3307,q3311下方连接一个所述第一手指耗材q3309,所述第一手指耗材q3309内表面为柔软的医用硅胶。
100.有利的是,所述第一三维压力传感器q3307,q3311和所述第一手指耗材q3309之间固定有第一电磁铁q3308,q3310,所述第一手指耗材q3309内具有与所述第一电磁铁q3308,q3310磁性连接的第一铁片。
101.其中,第一手指耗材q3309内部形成凹槽,第一铁片放入凹槽内与电磁铁磁性连接,方便对耗材的更换。第一手指耗材q3309为经过环氧乙烷灭菌的一次性耗材,每台手术使用一套新的。第一手指耗材q3309的内表面为软性的医用硅胶加工,可以防止打滑和损坏手术器材。
102.更有利的是,所述第一手指连接板q3302一侧向外倾斜延伸形成第一手指摄像头支架,所述手指摄像头支架上至少连接一个第一手指摄像头q3301,所述第一手指摄像头q3301朝向所述第一手指耗材q3309方向布置。第一手指摄像头q3301用于观察手指端的环境。
103.一个第一连接片q3306,q3312为顺时针螺纹,另一个第一连接片q3306,q3312为逆时针螺纹,因此,在电机转动时,两个第一手指耗材q3309会进行相对运动或相反运动,实现对物体的夹紧和打开。在夹紧物体后,第一三维压力传感器q3307,q3311会感受到压力值,达到一定数值后,电机停止运动。在抓取的过程中,第一手指摄像头q3301会时刻关注着物体的形态,以确保不会发送夹坏器材的情况。
104.参见附图9,第二手指装置q3400包括:
105.第二手指连接板q3402,所述第二手指连接板q3402顶部与另一个机械臂的端部连接,其底部形成具有两个平行布置,且向下凸出的安装条带;
106.两个第二手指导轨q3415,所述第二手指导轨q3415对应安装于所述安装条带下方,每一个所述第二手指导轨q3415上均滑动有至少两个第二手指滑块;
107.第二手指丝杠电机q3404,所述第二手指丝杠电机q3404通过第二手指电机支架固定于所述第二手指连接板q3402下方,且位于两个所述安装条带之间;
108.过渡板q3406,所述过渡板q3406顶部具有与所述第二手指丝杠电机q3404的丝杠螺纹连接的连接块,且所述过渡板q3406固定于所述第二手指滑块底面;
109.两个第三手指导轨q3405,所述过渡板q3406底部平行布置有两个第三手指导轨q3405,且与所述第二手指导轨q3415垂直布置,每一所述第三手指导轨q3405下部滑动有至少两个第三手指滑块;
110.第三手指丝杠电机q3407,两个所述第二手指导轨q3415之间通过电机支架固定有所述第三手指丝杠电机q3407;
111.第二连接片q3408,q3414,每一个所述第三手指滑块上对应连接一个第二连接片q3408,q3414,两个所述第二连接片q3408,q3414上分别具有与所述第三手指丝杠电机q3407的丝杠螺纹配合的顺时针螺纹和逆时针螺纹;
112.第二三维压力传感器q3409,q3412,每一个所述第二连接片q3408,q3414下方对应连接一个所述第二三维压力传感器q3409,q3412;以及
113.第二手指耗材q3411,每一个所述第二三维压力传感器q3409,q3412下方连接一个所述第二手指耗材q3411,所述第二手指耗材q3411内表面为柔软的医用硅胶。
114.其中,第二手指耗材q3411内部形成凹槽,第二铁片放入凹槽内与电磁铁磁性连接,方便对耗材的更换。第二手指耗材q3411为经过环氧乙烷灭菌的一次性耗材,每台手术使用一套新的。第二手指耗材q3411的内表面为软性的医用硅胶加工,可以防止打滑和损坏手术器材。
115.有利的是,所述第二三维压力传感器q3409,q3412和所述第二手指耗材q3411之间固定有第二电磁铁q3410,q3413,所述第二手指耗材q3411内具有与所述第二电磁铁q3410,q3413磁性连接的第二铁片。
116.更有利的是,所述第二手指连接板q3402向两侧倾斜延伸形成第二手指摄像头支架,每一个所述第二手指摄像头支架上至少连接一个第二手指摄像头q3401,q3403,所述第二手指摄像头q3401,q3403朝向所述第二手指耗材q3411方向布置。
117.一个第二连接片q3408,q3414为顺时针螺纹,另一个第二连接片q3408,q3414为逆时针螺纹,因此,在第三手指丝杠电机q3407(其中第三是指对丝杠电机的顺序排号,不是指第三手指)转动时,两个第二手指耗材q3411会进行相对运动或相反运动,实现对物体的夹
紧和打开。在夹紧物体后,第二三维压力传感器q3409,q3412会感受到压力值,达到一定数值后,电机停止运动。在抓取的过程中,第二手指摄像头q3401,q3403会时刻关注着物体的形态,以确保不会发送夹坏器材的情况。在第二手指丝杠电机q3404的带动下,下方的整个手指装置可以进行左右移动,配合第三手指丝杠电机q3407的夹紧动作,可以实现对导丝、外鞘等的往复推进动作。具体为,第二手指丝杠电机q3404转动使得第二手指耗材q3411移动到最右端,第三手指丝杠电机q3407转动使得第二手指耗材q3411夹紧导丝或外鞘,第二三维压力传感器q3409,q3412用于感受夹紧力,夹紧后转动第二手指丝杠电机q3404使得手指向左移动至最左端,第三手指丝杠电机q3407打开导丝或外鞘,转动第二手指丝杠电机q3404退回到原位,依此循环,直到到达所需的位置为止。
118.手术穿刺机器人的穿刺工作过程中,以手腕的桡动脉穿刺为例说明:手术开始后,把所需的穿刺手术耗材放置在导管床上,机器人移动到导管床旁边。使用机器人的第一手指装置找到病人的手腕,定位到桡动脉的位置后,使用手指感受桡动脉的脉搏,可以采用其中一个手指感受脉搏,另外一个手指悬空,感受的手指耗材上的三维压力传感器查找脉搏,查找过程中如果位置不对,就更换位置继续查找,如果感受到脉搏,手指摄像头会定位这个位置,以此位置为穿刺点。脉搏检测过程是:如果压力值为有规律的变化数值,说明为脉搏;如果压力值不变,说明不是脉搏,三维压力传感器可以为fa702-d,或者硅压阻式,压力传感器体积大小根据使用选择。机器人第一手指装置抓取蘸取了酒精的棉球擦拭桡动脉附件的皮肤。机器人第一手指装置抓取麻醉剂的注射器,移动到桡动脉附件的地方,轻轻穿入皮肤。机器人第二手指装置推送注射器一定剂量后停止。第一手指装置把持注射器。等待片刻后,使用机器人第一手指装置轻轻抓住病人的手臂,机器人第二手指装置抓取穿刺针,使用第二手指摄像头找到穿刺点后,在第二手指丝杠电机的带动下,慢慢把穿刺针置入皮肤中,同时第二手指装置的两个摄像头观察是否有回血现象,发现有回血后,停止移动电机。机器人第一手指装置慢慢移动抓住穿刺针,机器人第二手指装置拔出针芯。第一手指装置慢慢下降一些,然后第二手指装置抓取穿刺导丝,将其穿入穿刺针中。慢慢往复推送导丝一段距离后。第一手指装置按住穿刺口的地方,第二手指装置拔出穿刺针管。第二手指装置抓取外鞘,第一手指装置抓住穿刺导丝的末端。第二手指装置把外鞘穿入导丝中,然后第一手指装置按住穿刺口,第二手指装置把外鞘沿着导丝穿入到血管中,一直向前推送直到外鞘口到达穿刺口的地方。至此完成整个穿刺过程。穿刺完成后,机器人退回到角落,不影响手术的后续操作。
119.更换导管导丝机器人q4,参见附图10-13,用在介入手术中,对于导丝、球囊或支架导管等介入手术耗材进行更换操作。配合介入手术机器人更换导丝导管,也可以配合医生辅助完成更换导丝导管。本发明用于完成导丝的穿入和退出,导管穿入导丝并推入到y阀内,导管退出导丝等手术操作动作。可以保证在更换导丝导管过程中,导管和导丝不发生位移,保证手术安全。
120.更换导管导丝机器人q4包括底座装置、头部及驱动手臂装置q4400,驱动手臂装置q4400用于完成对更换导丝导管的动作。设置有3组手臂,各自可以独立运动。3组手臂安装在一块连接板上,连接板通过两组组丝杠电机和两组直线导轨可以进行前后移动,用于把手臂伸出和收回。三组手臂结构基本相同,都可以进行左右运动。每组手臂内都有一个夹紧机构,用于夹紧和松开导丝或导管。夹紧装置内设置有压力传感器,用于检测夹紧力。三组
手臂在工作时要相互配合动作。
121.驱动手臂装置q4400包括手臂支架q4312,所述手臂支架q4312为龙门形架,其下部与底座装置连接,其顶平面上平行固定有两组y轴直线导轨q4308,每一个所述y轴直线导轨q4308上均滑动有第一滑块,所述第一滑块顶面固定工作板q4306,所述手臂支架q4312的顶平面上位于两个所述y轴直线导轨q4308之间,平行布置有两组y轴丝杠电机q4309,每一组所述y轴丝杠电机q4309的丝杠与所述工作板q4306上对应设置的第一螺纹孔配合传动;所述工作板q4306顶面上靠近所述导管床方向依次平行布置有所述第一手臂机构、所述第二手臂机构及所述第三手臂机构,所述y轴丝杠电机q4309与底座上的驱动装置连接。在y轴丝杠电机q4309的带动下,工作板q4306可以进行左右移动,完成对整个手臂进行伸长和收回动作。
122.参见附图11和12,所述第一手臂机构、第二手臂机构及第三手臂机构结构相同,均包括直角架q4423,所述直角架q4423包括形成l形的连接段和夹持段,所述连接段滑动于所述手臂支架q4312上固定的x轴直线导轨q4419上,所述连接段顶部安装有y向导轨,所述y向导轨上滑动有第三滑块,所述第三滑块顶部固定连接具有第三螺纹孔的直角连接片q4422,所述连接段上位于所述y向导轨后部,通过y向电机支架q4401固定有y向丝杠电机q4402,所述y向丝杠电机q4402的丝杠与所述第三螺纹孔配合传动,所述y向丝杠电机q4402与驱动装置连接;所述直角连接片q4422前部连接有夹紧件q4420,所述夹紧件q4420与所述夹持段配合形成所述夹紧机构。y向丝杠电机q4402带动第三滑块移动,进而实现所述夹持段与夹紧件q4420的夹紧。
123.有利的是,参见附图11,所述直角连接片q4422前端具有第一连接凸台,所述夹紧件q4420为直角片,其上部具有与所述第一连接凸台配合的第二连接凸台,所述第一连接凸台和所述第二连接凸台连接,所述夹持段垂直所述连接段向下,位于工作板和手臂支架前部,靠近导管床侧;所述夹紧件q4420下部和所述夹持段形状相同,两者之间形成夹持区域,所述夹持区域两侧内壁上固定有医用硅胶片q4418,防止打滑。
124.第一连接凸台和所述第二连接凸台错开布置,用于连接压力传感器q4421的两端,且所述压力传感器q4421与底座装置的主机连接,用于检测夹持力大小。由此通过压力传感器q4421将夹紧力反馈至主机,主机发送指令给控制装置驱动对应的电机。保证夹紧力可控。
125.所述第一手臂机构、第二手臂机构及第三手臂机构中对应的直角架q4423远离所述夹持段侧连接有x向驱动板q44231,每一个所述x向驱动板q44231对应一组x向驱动机构q44232,所述x向驱动机构q44232与驱动装置连接。x向驱动机构q44232,为了方便驱动,根据布置,三个x向驱动板q44231长短不同,对应布置有三组驱动丝杠电机(q4404、q4403、q4407)及三组驱动电机支架(q4405、q4406、q4408)。
126.附图12和13从左到右,依次是第一手臂机构、第二手臂机构、第三手臂机构,手臂装置面向导管侧,需要机器人控制第一手臂机构在前端q4105处进行夹持导丝,然后固定第一手臂机构使之保持不动。第三手臂机构抓取导管q4103的头端,第二手臂机构抓取导丝q4102的尾端,调整位置把导管q4103穿入导丝q4102中,然后第三手臂机构推送导管q4103向前移动,接近第二手臂机构时,松开第二手臂机构,然后控制第二手臂机构相y阀方向移动约2cm,控制第二手臂机构夹紧导丝,控制第三手臂机构继续向前推送导管q4103向前移
动,依次循环直到导丝q4102的尾端从导管q4103中穿出3cm左右时,操作第三手臂机构后退,移动到后端q4101处,夹持住从导管q4103中间端露出来的导丝q4102。然后控制第二手臂机构在中端q4104处,夹持住导管q4103向y阀的方向推送,第二手臂机构把导管q4103进行向前推送。操作第三手臂机构向后移动,直到把导丝q4102拉成直线。当第二手臂机构移动到第一手臂机构处时,停止移动第二手臂机构,控制第一手臂机构抓住y阀q4106,然后控制第二手臂机构推送导管q4103进入y阀q4106,到达y阀后,松开第二手臂机构,并后退2cm左右,夹紧导管再向前移动,依次循环,直到导管q4103的头端部分完全进入到y阀q4106内为止。
127.在需要把导管q4103从导丝q4102上取出时,此时,导管和导丝都在人体血管内。在撤出导管时,需要保证导丝的位移不发生变化。控制第三手臂机构夹紧距离y阀q4106出口处2-3cm的导丝q4102,控制第一手臂机构夹紧y阀q4106,控制第二手臂机构夹紧y阀q4106出口处的导管q4103,保证第三手臂机构的位置不动,控制第二手臂机构向后移动直到接近第三手臂机构处后停止,然后松开第三手臂机构向后移动2cm后夹紧导丝。控制第二手臂机构继续向后移动直到接近第三手臂机构处后停止,依次循环直到导管的头端离开y阀q4106的尾端2-3cm后为止,然后控制第一手臂机构移动到y阀q4106出口的位置,夹紧导丝并使之保证不动。然后控制第二手臂机构和第三手臂机构一起向后运动,直到导管离开导丝。
128.在更换导丝时,首先把导丝穿入y阀q4106内,控制第三手臂机构和第二手臂机构夹住导丝接近头端的位置,第一手臂机构夹住y阀q4106并使之位置保持不动,控制第三手臂机构和第二手臂机构向前推送导丝进入y阀q4106,第二手臂机构移动到y阀出口处后停止,然后松开第三手臂机构,向后移动2cm,然后夹紧导丝,松开第二手臂机构,向后移动2cm后夹紧导丝。然后第三手臂机构和第二手臂机构一起向前移动直到第二手臂机构移动到y阀出口处后停止,以此循环直到完成10-12组动作后停止。
129.在需要把导丝q4102取出时,控制第一手臂机构夹紧y阀q4106并使之位置保持不动。控制第三手臂机构移动到y阀q4106的出口处,夹紧导丝q4102,然后向后移动,直到导丝q4102的头端全部离开y阀q4106的尾端后为止,此时证明导丝已完全取出。
130.耗材递送机器人q5,参见附图16,用于自动管理和递送手术耗材,全过程自动化,节省的人力资源,整体装置结构紧凑,体积小,非常适合导管室内的环境。包括底座装置、头部及执行装置。
131.参见附图17,执行装置包括对称布置在头部两侧的两个手臂组件;手臂组件包括固定在u型升降架q5237顶面的手臂直线导轨q5226,手臂直线导轨q5226上滑动连接有手臂滑块q5230,手臂滑块q5230上固定有连接件q5224,连接件q5224上固定有后臂q5225;后臂q5225前端转动连接有中臂连接件q5229,后臂q5225上安装有第五伺服电机q5222,第五伺服电机q5222动力轴和中臂连接件q5229固定;中臂连接件q5229和中臂q5228固定,中臂q5228前端转动连接有前臂q5231,中臂q5228上安装有第六伺服电机q5220,第六伺服电机q5220动力轴和前臂q5231固定;前臂q5231前端固定有第七伺服电机q5227,第七伺服电机q5227的动力轴固定有第三电动抓手q5232;u型升降架q5237上安装有手臂丝杠电机q5223,手臂丝杠电机q5223的轴端丝杠和连接件q5224侧面的螺纹孔螺纹连接。
132.耗材递送机器人q5用于运送手术耗材给介入手术。其中,底座和升降部主要用于实现机器人的移动、升降机器人。底座控制整体机器人的移动,包括四组由电机控制的车轮
装置。升降部可以抬升或下降系统头部组件和手臂组件的高度。头部和执行装置主要用于完成系统识别、手臂控制。头部为系统的观察和输出端。设置有2个摄像头,用于观察外部环境。设置有第二触摸屏用于给用户进行信息反馈,以及接收用户的指令,是用户的控制端。头部可以进行全方位的移动,以实现对环境更好地观察。手臂组件用于完成对物品的抓取。手臂组件可以进行前后的伸缩,在需要抓取时,手臂展开。抓取完成后,手臂收回。通过手臂组件,可以完成对手术耗材的抓取和对包装的打开动作。
133.有利的是,耗材递送机器人q5可以和现有的耗材管理系统匹配使用,也可以单独配备一套耗材管理系统,可以与耗材管理系统通过蓝牙等形式进行无线通讯,能够很好地协同工作。
134.快速充电机器人q6,参见附图14和15,对手术室内的各个机器人进行快速充电,保证各机器人能进行持续的工作。快速充电机器人q6与充电区域内的充电柜配合使用,充电柜用于给电池和充电机器人自身进行充电。采用快速充电机器人自动给其他机器人换电池的方式,整个换电池过程快,1分钟内可以完成。充电机器人在接收到需要换电池的信号后,能自动携带一块充满电的电池,行驶到需要换电池的机器人旁边,把它的“旧”电池换下,安装上“新”的电池。然后把“旧”电池带回到手术室外的充电柜,并给其进行充电。整个过程可以由机器人自动完成。也包括底座装置、头部和躯干装置。
135.所述充电柜q6100位于手术室外(充电区域9),其上具有人机交互的触摸屏q6103,控制主机安装于所述充电柜q6100的外壳内,并与介入手术机器人所在网络连接,能够接收到具体哪一个机器人需要换电池的信号,触摸屏q6103接收和反馈信息,传递到控制主机进行数据处理和储存;所述外壳内部安装有用于提供稳定合适电源输入的变压器;其外部具有多个用于充电的充电格口q6102,可以设置十个充电格口,满足手术机器人电池充电的需要;每一个所述充电格口q6102上均具有与电池q6105的插头配合的充电插口;所述充电格口q6102下方具有机器人充电孔;快速充电机器人q6为自动行走式的机器人,其与控制主机通讯连接,用与给介入手术机器人中电量低的机器人更换电池,并将更换后的电池放入所述充电格口q6102内充电,其上具有与所述充电孔配合的充电头q6204。
136.充电时,电池q6105底部的充电孔和充电柜q6100内的充电插头会进行连接。电池q6105前端安装有铁片,会和充电柜内的电磁铁进行吸附连接,使得电池进行固定。当有电池q6105放入充电单元格q6102内时,系统会开始自动给电池进行充电,直到电池电量充满后,会自动切断电源,并在触摸屏上给于提示,同时也会发送信息给充电机器人q6200,使得机器人能够快速找到准备就绪的电池。系统可以支持10组电池同时进行充电,这样可以有效的满足多个机器人的换电池需求。当充电机器人自身没电时,它可以在充电柜下方的充电台上进行充电。充电柜上设置了2组充电台,可以使得2个快速充电机器人q6进行同时充电。
137.其中,躯干装置用于完成对电池的推送和收回、系统的升降。躯干装置可以进行前后、上下的伸缩,在需要推送时,把电池推出。动作完成后,可以收回。通过系统整体配合,可以完成对电池的更换动作。
138.参见附图15,具体包括支撑板q6225,所述支撑板q6225位于底座装置的行走底盘上,其顶部具有可相对竖直方向移动的容纳格架q62271,所述容纳格架q62271具有水平布置的两个容纳格,一个用于容纳运输充满电的电池q6105,另一个用于容纳运输电量少的电
池q6105;所述容纳格架q62271其顶部连接所述头部机构;其远离所述头部机构一端向外延伸有连接板q6227,所述连接板q6227上相对两个所述容纳格设置有可伸缩移动的抓取推送机构,所述抓取推送机构与驱动器连接。
139.所述容纳格架q62271两侧固定在所述支撑板q6225上有两个支架q6226,每个所述支架q6226内侧面上均固定有竖直直线导轨q6224,每一个所述竖直直线导轨q6224上均滑动连接有第一滑块,两组所述支架q6226上的第一滑块均与所述容纳格架q62271外壁固定;所述连接板q6227两侧均具有第一螺纹孔,固定于支撑板q6225上的两个竖直丝杠电机组件q6212,q6228中的丝杠与两个所述第一螺纹孔配合,且所述竖直丝杠电机组件q6212,q6228电性连接驱动器。由此通过竖直丝杠电机组件q6212和q6228,分别和连接板q6227的左右两侧的第一螺纹孔进行配合完成升降。
140.参见附图15,所述抓取推送机构包括两组水平直线导轨q6216,所述水平直线导轨q6216固定于所述连接板q6227上,且位于所述容纳格架q62271后方,每一个所述水平直线导轨q6216上均滑动连接有第二滑块,每一组所述第二滑块上均固定有一个推杆q6211,每一个推杆q6211底部均具有第二螺纹孔,其端部均具有电磁铁,用于吸附电池q6105上的铁片;所述连接板q6227位于两组所述水平直线导轨q6216外部、固定有两个水平丝杠电机组件q6229,所述水平丝杠电机组件q6229的丝杠与所述第二螺纹孔配合,且其电性连接驱动器。由此通过水平丝杠电机组件q6229与第二螺纹孔配合,实现推杆的伸出及退回,推杆前端的电磁铁与电池上的铁片配合,用于抓取电池。
141.清扫机器人q7,参见附图18和19,主要由三部分组成,底座装置q7100、躯干装置q7200、头部和手臂装置q7300。整体装置可以在介入手术导管室内活动,完成对导管室内的地面和导管床等物品的清洁,保证对导管室的整洁和无菌环境。
142.底座装置q7100主要用于实现机器人的移动、完成地面清洁动作,包括运动装置、扫地装置q7101、擦地装置q7102三部分,运动装置用以控制整体机器人移动,扫地装置q7101用以完成机器人的扫地动作,打扫地面的垃圾和灰尘,擦地装置q7102用以完成机器人的擦地动作;运动装置、扫地装置q7101、擦地装置q7102整体安装于一底板q7103上,底板q7103上表面的四角处各自安装有一用以支撑躯干装置q7200的立柱q7104。
143.运动装置由四组结构相同并由电机驱动的车轮组件组成,下面就其中一组进行说明。车轮组件包括车轮q7105、车轮连接板q7106、第一伺服电机q7107、第二伺服电机q7108;车轮连接板q7106呈直角形,其下部竖板上开设有车轮连接板通孔;第一伺服电机q7107固定于车轮连接板q7106的内侧空间内,且其电机轴穿过车轮连接板通孔与下部竖板外侧的车轮q7105相连接,第一伺服电机q7107控制车轮q7105的前进和后退;底板q7103的四角处各开设有一电机安装孔,第二伺服电机q7108固定于底板q7103上对应位置的电机安装孔内,且其电机轴穿过电机安装孔与车轮连接板q7106的上部横板相连接,第二伺服电机q7108控制车轮q7105的转向。第一伺服电机q7107与第二伺服电机q7108进行配合,加之四组车轮q7105一起运动,可以实现整个机器人的全方位移动。
144.躯干装置q7200主要用于支撑和升降机器人,包括支撑板q7210以及安装于支撑板q7210上的控制和电源设备、扫地控制装置、擦地控制装置、升降装置;支撑板q7210的底部与立柱q7104的顶部相连接;控制和电源设备为系统供电,并作为整个系统的控制信息处理中心;扫地控制装置连接扫地装置q7101,用以控制扫地装置q7101的高度,实现系统的不同
工作模式;擦地控制装置连接擦地装置q7102,用以控制擦地装置q7102的高度,实现系统的不同工作模式;升降装置与头部和手臂装置q7300连接,用于抬升或下降头部和手臂装置q7300的高度。
145.头部和手臂装置q7300主要用于完成系统识别、手臂控制,包括头部和手臂装置支架q7301以及安装于头部和手臂装置支架q7301上的头部装置、手臂装置,头部和手臂装置支架q7301与升降装置相连接,头部装置为系统的观察和输出端,手臂装置用于完成对物品的抓取。头部装置可以进行全方位的移动,以实现对环境更好观察。手臂装置用于完成对物品的抓取。手臂装置可以进行前后的伸缩,在需要抓取时,手臂展开。抓取完成后,手臂收回。通过手臂系统,可以完成对导管床上物品的清理。
146.上述各机器人的底座装置和头部装置结构都可以相同,有利于降低成本,提高了机器人部件的互换性。底座能够实现自动行走,头部或头部装置可以实现水平360度转动,及俯仰运动,方便灵活观察周围环境。各机器人上均设置有通信模块,实现整体系统的可通讯性。
147.造影剂注射装置可以采用现有技术,如专利文献cn215608391u公开的一种电动造影剂注射装置。
148.自动转运车8,可以采用现有的转运车,也可以为具有自动充电功能的转运系统,参见附图20-22,包括转运车8100、自动固定和自动充电装置(相当于转运车充电桩81),其中自动固定和自动充电装置包括:壳体,所述壳体为隐藏式,嵌设于地下8101,其盖体8316可打开露出内部形成的容纳腔;固定机构8304,所述固定机构8304位于所述容纳腔内,用于自动伸出并固定转运车;自动充电机构,所述自动充电机构位于所述容纳腔内部,其充电插头8311连接外部电源、且可伸缩于所述容纳腔,用于供所述转运车充电;以及控制柜8200,所述控制柜8200用于显示、储存信息、参数设置及处理数据,且与所述自动充电机构及固定机构304。采用此方案可以保证自动转运装置充电,进而保证自动转运装置正常工作。
149.自动转运装置底部具有与所述固定机构8304配合的固定部,其底部具有与所述充电插头8311配合的充电头。充电插头8311的两极分别连接网电源的火线和零线,同时还设置有行程开关,用于检测两个插头是否已连接。
150.具体而言,所述自动转运装置底部相对四个所述固定机构8304设置有四个固定孔8102;所述充电头8110位于所述自动转运装置底部的翻盖8103内,所述翻盖8103朝下打开,其旁边安装有位置传感器8104,所述位置传感器8104与位置传感器基站8301通讯连接。当固定机构8304的固定杆都插入固定孔后,自动转运装置就固定牢靠了,不会使得车体随意移动。
151.位置传感器8104用于和位置传感器基站8301进行配合,辅助自动转运装置进行定位。自动转运装置接受到位置传感器基站8301的坐标后,控制移动车体,使得自动转运装置到达确定位置。
152.dsa装置可以采用现有技术实现。
153.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任
何的一个或多个实施例或示例中以合适的方式结合。此外,本领域的技术人员可以将本说明书中描述的不同实施例或示例进行接合和组合。
154.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。