技术特征:
1.一种基于围绕三角形寻找边界节点的判定方法,其特征在于,包括:构建第一节点集合,所述第一节点集合由判定节点的第一一跳邻居节点构成,并且该集合内所述第一一跳邻居节点的数量不少于3;其中,第一一跳邻居节点为判定节点的一跳邻居节点,并且该一跳邻居节点与判定节点共享至少两个一跳邻居节点;构建以判定节点为原点的极坐标系,所述极坐标系以所述第一节点集合中任一第一一跳邻居节点为正轴点,该正轴点为所述极坐标系上正轴方向的指向节点;获取所述第一节点集合中的所有节点在所述极坐标系中自正轴方向开始逆时针方向旋转至对应节点的角度值,并根据角度值的大小顺序排序;构建第二节点集合,所述第二节点集合由所述极坐标系中和正轴点相通、且与所述正轴点夹角小于180度的第一一跳邻居节点构成;其中,所述和正轴点相通包括所述第二节点集合中与所述正轴点为一跳邻居的节点、经由所述第二节点集合中若干节点的中继后通信于所述正轴点的节点;构建第三节点集合,所述第三节点集合由所述极坐标系中和正轴点相通、且与所述正轴点夹角大于180度的第一一跳邻居节点构成;其中,所述和正轴点相通包括所述第三节点集合中与所述正轴点为一跳邻居的节点、经由所述第三节点集合中若干节点的中继后通信于所述正轴点的节点;当所述第二节点集合中存在一第一节点、所述第三节点集合中存在一第二节点,所述第一节点和第二节点满足第一预设条件,则当前极坐标系中由第一节点、第二节点和正轴点构成的三角形围绕所述判定节点,所述判定节点为内部节点;其中,所述第一预设条件为所述第一节点和第二节点互为一跳邻居、且所述第一节点和第二节点在当前所述极坐标系中逆时针方向的夹角小于180度。2.根据权利要求1所述的基于围绕三角形寻找边界节点的判定方法,其特征在于,当所述第二节点集合、第三节点集合中不存在互为一跳邻居的第一节点和第二节点,或不满足所述第一节点和第二节点在当前所述极坐标系中逆时针方向的夹角小于180度,则:定义第二节点集合在当前极坐标系中与所述正轴方向构成的角度值最大的角为第一夹角、构成该夹角的节点为第三节点,第三节点集合在当前极坐标系中与所述正轴方向构成的角度值最小的角为第二夹角、构成该夹角的节点为第四节点;构建第四节点集合,所述第四节点集合由所述第一节点集合中不属于第二节点集合和第三节点集合,且其在当前极坐标系中与所述正轴方向构成的角度值大于第一夹角、小于第二夹角的第一一跳邻居节点构成;当所述第四节点集合中存在一满足第二预设条件的第五节点,则当前极坐标系中由第三节点、第四节点和第五节点构成的三角形或由第三节点、第四节点和正轴点构成的三角形围绕所述判定节点,所述判定节点为内部节点;其中,所述第二预设条件为:(1)第五节点能经由所述第四节点集合中若干节点的中继后分别通信于所述第三节点和第四节点;(2)第五节点在当前极坐标系中与第三节点构成的相较于原点的夹角小于180度、且与第四节点构成的相较于原点的夹角小于180度。3.根据权利要求2所述的基于围绕三角形寻找边界节点的判定方法,其特征在于,当所述第四节点集合中不存在一第五节点满足能经由所述第四节点集合中若干节点的中继后分别通信于所述第三节点和第四节点或不存在一第五节点满足在当前极坐标系中与第三
节点构成的相较于原点的夹角小于180度、且与第四节点构成的相较于原点的夹角小于180度,则:在所述第一节点集合中依次选择在先未作为正轴点的任一第一一跳邻居节点作为正轴点,重新确定所述极坐标系的正轴方向;依次判断重新确定正轴方向的所述极坐标系中是否存在符合第一预设条件的第一节点和第二节点、或是否存在符合第二预设条件的第五节点;若存在,则作为当前极坐标系原点的判定节点为内部节点;若均不存在,则作为当前极坐标系原点的判定节点为边界节点。4.根据权利要求1所述的基于围绕三角形寻找边界节点的判定方法,其特征在于,还包括:获取判定节点的一跳邻居信息,建立判定节点的一跳邻居节点集合;筛选并保留所述一跳邻居节点集合中与所述判定节点共享至少两个一跳邻居的一跳邻居节点;当所述一跳邻居节点集合中保留的所述一跳邻居节点的数量少于3,则所述判定节点为边界节点。5.一种基于围绕三角形寻找边界节点的判定系统,其特征在于,包括:第一构建模块,用于构建第一节点集合,所述第一节点集合由判定节点的第一一跳邻居节点构成,并且该集合内所述第一一跳邻居节点的数量不少于3;其中,第一一跳邻居节点为判定节点的一跳邻居节点,并且该一跳邻居节点与判定节点共享至少两个一跳邻居节点;第二构建模块,用于构建以判定节点为原点的极坐标系,所述极坐标系以所述第一节点集合中任一第一一跳邻居节点为正轴点,该正轴点为所述极坐标系上正轴方向的指向节点;第一获取模块,用于获取所述第一节点集合中的所有节点在所述极坐标系中自正轴方向开始逆时针方向旋转至对应节点的角度值,并根据角度值的大小顺序排序;第三构建模块,用于构建第二节点集合,所述第二节点集合由所述极坐标系中和正轴点相通、且与所述正轴点夹角小于180度的第一一跳邻居节点构成;其中,所述和正轴点相通包括所述第二节点集合中与所述正轴点为一跳邻居的节点、经由所述第二节点集合中若干节点的中继后通信于所述正轴点的节点;第四构建模块,用于构建第三节点集合,所述第三节点集合由所述极坐标系中和正轴点相通、且与所述正轴点夹角大于180度的第一一跳邻居节点构成;其中,所述和正轴点相通包括所述第三节点集合中与所述正轴点为一跳邻居的节点、经由所述第三节点集合中若干节点的中继后通信于所述正轴点的节点;第一判断模块,用于当所述第二节点集合中存在一第一节点、所述第三节点集合中存在一第二节点,所述第一节点和第二节点满足第一预设条件时,判断当前极坐标系中由第一节点、第二节点和正轴点构成的三角形围绕所述判定节点,所述判定节点为内部节点;其中,所述第一预设条件为所述第一节点和第二节点互为一跳邻居、且所述第一节点和第二节点在当前所述极坐标系中逆时针方向的夹角小于180度。6.根据权利要求5所述的基于围绕三角形寻找边界节点的判定系统,其特征在于,还包
括:定义模块,用于定义第二节点集合在当前极坐标系中与所述正轴方向构成的角度值最大的角为第一夹角、构成该夹角的节点为第三节点,第三节点集合在当前极坐标系中与所述正轴方向构成的角度值最小的角为第二夹角、构成该夹角的节点为第四节点;第五构建模块,用于构建第四节点集合,所述第四节点集合由所述第一节点集合中不属于第二节点集合和第三节点集合,且其在当前极坐标系中与所述正轴方向构成的角度值大于第一夹角、小于第二夹角的第一一跳邻居节点构成;第二判断模块,用于当所述第四节点集合中存在一满足第二预设条件的第五节点,判断当前极坐标系中由第三节点、第四节点和第五节点构成的三角形或由第三节点、第四节点和正轴点构成的三角形围绕所述判定节点,所述判定节点为内部节点;其中,所述第二预设条件为:(1)第五节点能经由所述第四节点集合中若干节点的中继后分别通信于所述第三节点和第四节点;(2)第五节点在当前极坐标系中与第三节点构成的相较于原点的夹角小于180度、且与第四节点构成的相较于原点的夹角小于180度。7.根据权利要求6所述的基于围绕三角形寻找边界节点的判定系统,其特征在于,还包括:选择模块,用于在所述第一节点集合中依次选择在先未作为正轴点的任一第一一跳邻居节点作为正轴点,重新确定所述极坐标系的正轴方向;第三判断模块,用于依次判断重新确定正轴方向的所述极坐标系中是否存在符合第一预设条件的第一节点和第二节点、或是否存在符合第二预设条件的第五节点;若存在,则判断作为当前极坐标系原点的判定节点为内部节点;若不存在,则判断作为当前极坐标系原点的判定节点为边界节点。8.根据权利要求5所述的基于围绕三角形寻找边界节点的判定系统,其特征在于,还包括:获取模块,用于获取判定节点的一跳邻居信息,建立判定节点的一跳邻居节点集合;筛选模块,用于筛选并保留所述一跳邻居节点集合中与所述判定节点共享至少两个一跳邻居的一跳邻居节点;第四判断模块,用于当所述一跳邻居节点集合中保留的所述一跳邻居节点的数量少于3,判断所述判定节点为边界节点。9.一种电子设备,其特征在于,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器运行所述计算机程序时,实现如权利要求1-4中任一项所述的基于围绕三角形寻找边界节点的判定方法。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现如权利要求1-4中任一项所述的基于围绕三角形寻找边界节点的判定方法。
技术总结
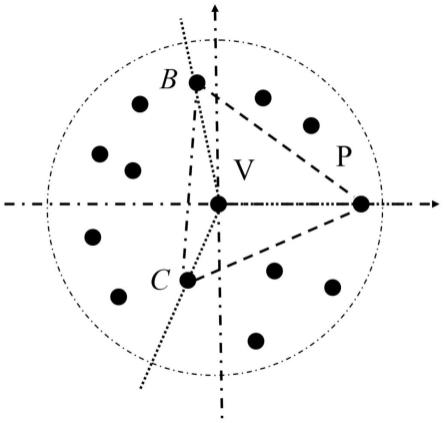
本发明提供的基于围绕三角形寻找边界节点的判定方法及系统,涉及无线传感器网络领域;其方法通过建立极坐标系,在极坐标系中依次确定按照预设条件构建的第二、第三和第四节点集合中是否存在满足第一、第二预设条件的节点,使得这类节点间或与正轴点构成围绕判定节点的三角形,达到识别判定节点是否为边界节点的过程;本发明无需使用节点的位置坐标、无需对判定节点收集邻居信息进行三角形枚举并随后逐个对生成的三角形进行三角形内点测试,判定过程迅速,且判定效率高。且判定效率高。且判定效率高。
技术研发人员:卫琳娜 吴宣够 郑啸
受保护的技术使用者:安徽工业大学
技术研发日:2022.07.20
技术公布日:2022/10/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。