1.本发明涉及视频会议技术领域,具体涉及一种远程在线评审系统。
背景技术:
2.科技是经济增长的发动机,是提高综合国力的主要驱动力。促进科技成果转化、加速科技成果产业化,已经成为世界各国科技政策的新趋势。
3.而科技研究转化为成果才能为国民经济服务,形成产业链并助力上下游工商业发展,并孵化一些本领域的科技企业,促进相关产业茁长成长,营造良好的社会科研环境,引导企业进行科技创新,而对科技成果的转化鉴定是评判企事业单位科技成果是否成功的重要手段,城市在进行科技成果鉴定时,会在评审时间前由评审系统随机抽取城市专家库内的本领域专家,并通知各专家评审时间及地点,届时在指定地点对企事业的科技成果转化进行评审,而现实情况是,为保证评审的公平公正,一般随机抽取专家的时间与评审时间不会间隔太久,时常会遇到抽取的专家不在本市或者即将离开本市的情况,评审会议需要保证会议的人员范围,而远程会议模式难以保证远程端的专家旁无他人进行干预,因此评审会不采用远程会议模式,而必须采取线下评审,在此种情况下就需要人工对抽取的专家进行变更,如此一来人工的干预难以保证评审的公正性,如果能够使专家远程进行会议时保证远程端只有专家一人且环境安全可靠,能够使出差的专家远程参加评审会议的同时保证公平公正,则能够大大的方便评审会议的操作。
技术实现要素:
4.本发明所要解决的技术问题是提供一种远程在线评审系统,可以保证远程在线评审会议的公平公正。
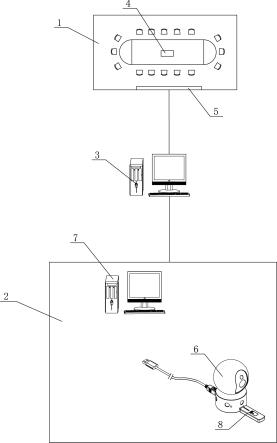
5.为解决上述技术问题,本发明所采用的技术方案是:一种远程在线评审系统,包括评审现场端和远程端,评审现场端和远程端与评审服务器通讯连接,在评审现场端设有用于采集评审现场视频和语音的现场端视频语音组件,远程端设有远程端电脑,远程端电脑与远程端视频语音组件通讯连接,远程端视频语音组件上设有视频摄像头和红外摄像头,视频摄像头用于对远程端的人员进行图像摄取和脸部识别认证,红外摄像头用于对视频摄像头所采集人员的红外特征进行提取,远程端视频语音组件上还设有对远程端环境内进行红外特征进行搜索的对比红外摄像头,对比红外摄像头将采集到的环境内红外特征与红外摄像头所采集到的人员红外特征进行对比,以判断远程端是否有其他人存在,评审服务器内设有专家库信息及专家脸部特征信息。
6.上述的远程端视频语音组件包括底座,底座呈圆柱状,多个对比红外摄像头沿底座圆周分布,底座上方设有可调座,可调座呈球状,视频摄像头和红外摄像头固定在可调座上,底座上还设有mic和音响组件。
7.优选的方案中,上述的远程端视频语音组件包括底座,底座呈圆柱状,底座内设有上设有转动连接的旋转座,旋转座可沿垂直轴线受控旋转,旋转座上分布有分别朝向斜向
上、水平、斜向下的斜向上红外对比摄像头、水平对比红外摄像头和斜向下对比红外摄像头,旋转座上方设有可调座,可调座呈球状并与底座的延伸段可调连接,视频摄像头和红外摄像头固定在可调座上,底座上还设有mic和音响组件。
8.优选的方案中,上述的底座中心处设有垂直布置的支撑轴,支撑轴贯穿旋转座并与之转动连接,旋转座下端设有旋转齿轮,旋转齿轮与驱动齿轮啮合连接,驱动齿轮由驱动电机驱动,驱动电机与支撑轴固定连接,支撑轴顶端与可调座连接。
9.上述的远程端视频语音组件内设有控制芯片,视频摄像头、红外摄像头、对比红外摄像头、mic以及音响组件都与控制芯片连接,控制芯片与usb接口电连接,远程端视频语音组件通过usb线缆与远程端电脑通讯连接。
10.上述的底座上设有用于与加密狗连接的加密狗usb插口,加密狗usb插口与控制芯片连接。
11.上述的远程端视频语音组件内置有gps模块,gps模块与加密狗进行通讯,将时间、经纬度信息等数据传送至gps模块进行加密运算。
12.上述的底座上左右各设有一个mic,mic与语音计算识别芯片电连接,语音计算识别芯片与控制芯片通讯连接,语音计算识别芯片对语音数据进行识别保存并与评审服务器内置的人员语音进行比对,以确认远程评审人员身份,同时两个mic所采集的数据经过语音计算识别芯片处理运算,以判别范围内是否存在其他人。
13.上述的远程端视频语音组件内设有wifi组件,wifi组件与控制芯片电连接。
14.上述的评审现场端设有现场端屏幕。
15.本发明提供的一种远程在线评审系统,通过视频摄像头和红外摄像头对视频内的专家进行识别认证和红外特征提取,并与红外摄像头所识别的环境内人员红外特征进行比对,以判断是否存在除专家以外的人员,可以防止远程端的专家受到他人的干扰和主使,保证评审过程公平公正。
附图说明
16.下面结合附图和实施例对本发明作进一步说明:图1为本发明的远程在线评审系统的结构示意图;图2为远程端视频语音组件的结构示意图;图3为远程端视频语音组件的前视图;图4为远程端视频语音组件的后视图;图5为优化方案的远程端视频语音组件的结构示意图;图6为优化方案的远程端视频语音组件的前视图;图7为优化方案的远程端视频语音组件的局部放大示意图;图8为视频摄像头的模块示意图;图9为现场端视频语音组件的结构示意图;图10为控制芯片的电气原理图;图11为视频摄像头的电气连接图;图12为语音计算识别芯片及mic的电气连接图;图13为加密狗usb插口的电气连接图;
图14为gps模块的电气连接图;图15为wifi组件的电气连接图;图16为音响组件的电气连接图。
17.图中:评审现场端1、远程端2、评审服务器3、现场端视频语音组件4、现场端屏幕5、远程端视频语音组件6、底座61、支撑轴611、可调座62、视频摄像头63、红外摄像头64、对比红外摄像头65、斜向上红外对比摄像头651、水平对比红外摄像头652、斜向下对比红外摄像头653、mic66、加密狗usb插口67、旋转座68、旋转齿轮681、驱动齿轮683、驱动电机683、音响组件69、远程端电脑7、加密狗8、usb线缆9、线缆滑环10、控制芯片11、语音计算识别芯片12、gps模块13、卡槽板14、wifi组件15。
具体实施方式
18.如图1、8和9中所示,一种远程在线评审系统,包括评审现场端1和远程端2,评审现场端1和远程端2与评审服务器3通讯连接,在评审现场端1设有用于采集评审现场视频和语音的现场端视频语音组件4,远程端2设有远程端电脑7,远程端电脑7与远程端视频语音组件6通讯连接,远程端视频语音组件6上设有视频摄像头63和红外摄像头64,视频摄像头63用于对远程端的人员进行图像摄取和脸部识别认证,红外摄像头64用于对视频摄像头63所采集人员的红外特征进行提取,远程端视频语音组件6上还设有对远程端环境内进行红外特征进行搜索的对比红外摄像头65,对比红外摄像头65将采集到的环境内红外特征与红外摄像头64所采集到的人员红外特征进行对比,以判断远程端是否有其他人存在,评审服务器3内设有专家库信息及专家脸部特征信息。
19.在进行评审会议时,在远程端2的专家将远程端视频语音组件6与远程端电脑7连接,打开远程端电脑7,远程端电脑7与评审服务器3连接,视频摄像头63采集远程端专家的脸部信息并与评审服务器3内专家库特征信息进行比对,判断当前图像是否为专家本人,认证完成后方可远程参加评审会议,在会议中,远程端视频语音组件6上的对比红外摄像头65不断对周围环境的红外特征进行提取和识别,将人体的红外特征进行计算比对,提取出判断为人体的红外特征,将信息与红外摄像头64所摄取的专家红外信息进行比对,以判断是否为同一人,若不是同一人,则终止远程端的会议权限,强制退出远程会议,通过视频摄像头63和红外摄像头64对视频内的专家进行识别认证和红外特征提取,并与红外摄像头65所识别的环境内人员红外特征进行比对,以判断是否存在除专家以外的人员,可以防止远程端的专家受到他人的干扰和主使,保证评审过程公平公正。
20.远程端视频语音组件6还可对视频摄像头63所摄取到的人体图像进行识别,以判断图像中的人员个数,当存在多余一个人员时,发出警告并终止会议权限。
21.如图2-4中所示,上述的远程端视频语音组件6包括底座61,底座61呈圆柱状,多个对比红外摄像头65沿底座61圆周分布,底座61上方设有可调座62,可调座62呈球状,视频摄像头63和红外摄像头64固定在可调座62上,底座61上还设有mic66和音响组件69。
22.多个圆周分布非对比红外摄像头65可以对远程端专家所处环境进行全范围充分的红外监测,以避免无关人员通过躲避视频摄像头63、红外摄像头64而错误判断远程端环境内只存在专家一人,mic66和音响组件69集成在远程端视频语音组件6上,专家只携带一个远程端视频语音组件6即可使用远程环境内自带的电脑实现参见远程评审会议。
23.优选的方案如图5-7中所示,上述的远程端视频语音组件6包括底座61,底座61呈圆柱状,底座61内设有上设有转动连接的旋转座68,旋转座68可沿垂直轴线受控旋转,旋转座68上分布有分别朝向斜向上、水平、斜向下的斜向上红外对比摄像头651、水平对比红外摄像头652和斜向下对比红外摄像头653,旋转座68上方设有可调座62,可调座62呈球状并与底座61的延伸段可调连接,视频摄像头63和红外摄像头64固定在可调座62上,底座61上还设有mic66和音响组件69。
24.优选的远程端视频语音组件6通过沿垂直轴旋转的旋转座68,以及分别朝向斜向上、水平、斜向下的对比红外摄像头,可以在评审会议中动态的对远程端环境进行扫描搜索,杜绝监控死角。
25.底座61底端设有卡槽板14,通过卡槽板14,可以将远程端视频语音组件6放置在电脑屏幕上固定,也方便旋转座68旋转扫描。
26.优选的方案如图5-7中所示,上述的底座61中心处设有垂直布置的支撑轴611,支撑轴611贯穿旋转座68并与之转动连接,旋转座68下端设有旋转齿轮681,旋转齿轮681与驱动齿轮683啮合连接,驱动齿轮683由驱动电机683驱动,驱动电机683与支撑轴611固定连接,支撑轴611顶端与可调座62连接。
27.通过驱动电机683对旋转座68进行可控驱动旋转,可以往复式旋转或者圆周式旋转,对房间内的空间进行扫描,将房内所有的红外图像信息进行收集,通过支撑轴611和齿轮啮合结构,保证旋转座68的旋转同时不影响可调座62与底座61的连接。
28.在旋转座68内设有线缆滑环10,线缆滑环10一端与旋转座68固定,另一端与支撑轴611固定,通过线缆滑环10将斜向上红外对比摄像头651、水平对比红外摄像头652和斜向下对比红外摄像头653的数据发送至底座61上的控制芯片11处。
29.如图10中所示,上述的远程端视频语音组件6内设有控制芯片11,视频摄像头63、红外摄像头64、对比红外摄像头65、mic66以及音响组件69都与控制芯片11连接,控制芯片11与usb接口电连接,远程端视频语音组件6通过usb线缆9与远程端电脑7通讯连接。
30.控制芯片11采用arm公司的cortex
™‑
m4处理器,其具有强大的运算功能和指令集,内置有加密模块,使用cortex
™‑
m4处理器对图像、红外信号可以进行基于can总线的快速处理,通过usb接口的通用化,专家在外可以只携带远程端视频语音组件6和usb线缆9,在出差旅馆内将远程端视频语音组件6与电脑进行连接,将远程端视频语音组件6内置的驱动安装至电脑即可参加远程评审会议,方便快捷。
31.如图3和13中所示,上述的底座61上设有用于与加密狗8连接的加密狗usb插口67,加密狗usb插口67与控制芯片11连接。
32.加密狗8内置单片机内有加密算法软件,加密模块与评审服务器3内的软件连接,通过软件在远程端电脑7显示输入密码窗口,每个专家对应其设置的唯一密码,该密码经过加密狗8内算法转换成其他整数或/和字符,将整数或/和字符发送至远程端电脑7内的解密函数进行解密,然后与存放在评审服务器3内与专家一一对应的解密整数或/和字符进行比对,以验证专家身份。
33.如图14中所示,上述的远程端视频语音组件6内置有gps模块13,gps模块13与加密狗8进行通讯,将时间、经纬度信息等数据传送至gps模块13进行加密运算。
34.利用gps数据的动态性质及不可篡改性,将gps模块13检测到的专家位置信息数据
和当前时间数据发送至加密狗8与专家输入的密码一起进行加密运算,经过加密后的数据发送至评审服务器3处进行验算解码,并与评审服务器3预先设置的会议时间和专家出差区域进行比对,通过时间比对,利用时间的动态性和gps时间的标准性保证专家会议的实时性,此功能避免了通过usb接口进行网络篡改上传预先拍摄的视频图像,由于该视频图像不带时间戳,因此在评审服务器3不被承认,将被认定为恶意评审记录,同样专家位置信息经过加密也起到实时性和验证作用,防止专家不在预先申报的位置进行远程审核。
35.如图3和12中所示,上述的底座61上左右各设有一个mic66,mic66与语音计算识别芯片12电连接,语音计算识别芯片12与控制芯片11通讯连接,语音计算识别芯片12对语音数据进行识别保存并与评审服务器3内置的人员语音进行比对,以确认远程评审人员身份,同时两个mic66所采集的数据经过语音计算识别芯片12处理运算,以判别范围内是否存在其他人。
36.通过语音对环境进行辅助鉴定、识别和保存,与图像、视频及红外信息结合,可以保证远程评审环境的可靠性,确保公平公正,也更加强了远程评审的加密识别技术的高门槛,杜绝被单一类型数据破密。
37.通过语音计算识别芯片12,还可以将采集到的语音中的音响组件69的数据进行消除,剩下只剩下环境音,可以更好地鉴别远程评审环境。
38.如图15中所示,上述的远程端视频语音组件6内设有wifi组件15,wifi组件15与控制芯片11电连接。
39.通过wifi组件15可以在远程评审处无电脑使使用无线功能与移动端连接,但远程端视频语音组件6依然保持其加密识别功能,使得远程评审会议能够满足不同环境的使用。
40.如图1中所示,上述的评审现场端1设有现场端屏幕5。
41.现场端屏幕5用于显示视频会议图像信息,现场端会议可以看到远程端专家图像,远程端专家也可通过远程电脑看到会议现场图像。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
