1.本发明涉及智慧城市及其安全领域,尤其涉及一种城市环境下多时间段稀疏犯罪发生地点的预测方法。
背景技术:
2.随着城市化进程快速推进,城市环境愈发复杂,犯罪研究是社会保障领域的一门重要学科。为了预防和制止犯罪,对犯罪准确预测的需求日益增加,虽然已经有很多算法来进行犯罪预测,但在预测多个时间段的稀疏类型犯罪的发生方面仍然存在挑战。
3.首先,一些犯罪类型非常罕见,只有少量的犯罪记录可以用于建模训练和预测。如盗窃、攻击等对社会危害不大的犯罪类型占比相对较高,而危险武器、公共和平侵犯等对社会危害较大的犯罪类型发生频率相对较低。也就是说,预测一些重要的犯罪类型可能会面临数据稀疏问题,它们的记录是不连续的和零星的。
4.此外,对多个连续时间段的后续犯罪的时间和地点进行预测的能力也是很重要的。一方面,有些方法在不知道确切时间的情况下,只能预测下一个可能的犯罪地点,因为它们不能明确地处理不连续的、零星的输入,而且犯罪记录的时间间隔不规律,使得预测毫无价值。另一方面,预测多个时间段而不是一个时间段是必要和有意义的。例如,一些重大事件可能会持续许多天,需要预防犯罪,并根据多日预测提前部署防御,而不是仅仅一天。虽然一些模型可以输出多天的预测,但零散的输入数据并没有被显式地处理。由于大多数序列模型假设输入序列的时间间隔是固定的,而下一次预测的时间也是按这个时间间隔计算的固定时间,所以当序列偶尔被观测到时,建模现实世界的多维时间序列是特别具有挑战性的。
技术实现要素:
5.发明目的:针对以上现有技术存在的问题,本发明提出了一种城市环境下多时间段稀疏犯罪发生地点的预测方法,着重解决城市环境下连续多个时间段罕见的犯罪地点进行预测,保障城市安全的问题。
6.技术方案:为实现本发明的目的,本发明所采用的技术方案是:一种城市环境下多时间段稀疏犯罪发生地点的预测方法,该方法包括以下步骤:
7.(1)建立城市环境下多时间段的稀疏犯罪发生地点的预测模型,所述犯罪发生地点预测模型包括城市空间和犯罪记录建模、门控循环网络-神经常微分方程-贝叶斯(后称gru-ode-bayes)犯罪地点预测模型、数据增强模块、邻近重复增强模块;城市空间和犯罪记录建模来抽象数据输入到模型,gru-ode-bayes犯罪地点预测模型通过输入城市网格犯罪特征来预测犯罪地点,数据增强模块通过利用高相关性的犯罪类型的犯罪记录和相似城市地区的犯罪记录进行补充训练数据,邻近重复增强模块从附近区域的犯罪事件中提取上下文来增强短期连续预测。
8.(2)对于不同的犯罪类型使用损失函数进行犯罪发生地点预测模型训练,得到训
练好的犯罪发生地点预测模型。
9.(3)利用训练好的犯罪发生地点预测模型对犯罪发生地点进行预测。
10.进一步的,其特征在于在步骤(1)中,所述的城市空间和犯罪记录建模描述如下:
11.抽象地理城市空间为n个正方形网格对于在时间j第i个的网格的嵌入是对所有该区域嵌入信息的连接其中vi是环境嵌入,包括但不限于每个类别兴趣点的数量、建筑的功能、人员的流动强度等;li是位置嵌入,将网格的经纬度进行编码嵌入;是动态犯罪嵌入,通过划分时间段计算每个时间段网格内发生的犯罪事件数量,可以得到一天的周期特征d
day
、一周的周期特征d
week
、一个月的周期特征d
month
,拼接得到动态犯罪嵌入犯罪记录可表示为ec=(i,j),其含义为在网格i中发生在j时间段的类型为c的一起犯罪事件,则按照时间排序的犯罪事件列表可表示为对于一个犯罪事件ec=(i,j),使用相应的网格嵌入来表示它。
12.进一步的,步骤(1)中所述的gru-ode-bayes犯罪地点预测模型描述如下:
13.gru-ode-bayes犯罪地点预测模型包含两个部分,一个预测风险网格嵌入的gru-ode模块,一个利用零星的观测记录对模型进行修正的bayes update模块。对类型为c的犯罪进行预测,将犯罪列表ec输入到模型,对于第一个记录是模型从时间j1开始,在时间j1最初预测的风险网格嵌入为在第k 1个记录的时间j
k 1
之前,由gru-ode模块对下一个时间点的风险网格嵌入进行预测,计算如下:
[0014][0015]
当一个真实的犯罪记录被获取,预测的嵌入将被gru-bayes更新,计算如下:
[0016][0017]
计算所有网格嵌入与预测风险网格嵌入的差值,差值最小的网格为tk时刻的预测风险网格。
[0018]
进一步的,步骤(1)中所述的数据增强模块采用两种数据增强策略:跨类型迁移和跨网格迁移;
[0019]
跨类型迁移数据增强基于两种高度相关的犯罪类型ca和cb,cb可能在ca发生的很短时间内发生,通过计算犯罪类型间的共现率来衡量两种犯罪类型之间的关系,共现率定义为在一段时间内同一网格内不同犯罪类型发生的频率δt(超参数),可计算如下:
[0020][0021][0022]
[0023]
对于补充犯罪类型ca,选择另一个相关分数最高的犯罪类型cb,将eb加入ea,使ea更长。训练时,对eb样本的损失给出一个权重,即co-occ(ca,cb)。
[0024]
跨网格迁移数据增强基于两个特征相似的网格更有可能发生相同的犯罪事件,通过计算网格之间的相似度得分,并为每个网格gi找到m(一个超参数)个最相似的网格。将这些网格中的犯罪事件添加到ec中。网格ga和gb之间的相似度得分取网格的环境嵌入vi和vj的皮尔逊相关系数,其中计算如下:
[0025][0026]
对于网格ga的事件ec=(a,j),若ga是gb最相似的网格,则向ec中添加事件ec=(a,j)。
[0027]
进一步的,在步骤(1)中,邻近重复增强模块描述如下:
[0028]
选择50个犯罪概率最大的网格候选candidate={can1,can2,
…
,can
50
},对于每个网格cani,获取其周围网格canj在时间[j-δt,j)发生的犯罪事件,并按照时间排序,得到一个邻近区域重复事件列表ni={e1,e2,
…
,e
cnt
},输入到gru模型中得到邻近重复上下文nci=gru(ni),将预测嵌入和邻近重复上下文nci使用一个超参数β相加作为最终预测嵌入,和候选candi的真正网格嵌入之间的差异di由欧几里得距离计算得到,然后选择最小距离δi的
[0029][0030][0031]
进一步的,在步骤(2)中,使用损失函数进行犯罪发生地点预测模型训练描述如下:
[0032]
对于所有类型c的记录,我们使用长度为16的滑动窗口扫描ec。将每组的前15条记录作为输入,最后一条记录作为标签。以最小化损失值为目标来训练模型,损失函数由两部分组成,λ1和λ2是超参数,表示如下:
[0033][0034]
损失基于真实记录的负对数似然,对于一个观察记录可能发生犯罪的所有网格p
pre
的概率分布和相应的损失如下:
[0035][0036][0037]
其中f
obs
将隐藏状态转换为n个维度,o是gi的独热编码,然后根据实际观测记录校验得到的先验概率,用kl-divergence拟合分布,利用所有nc观测记录,α为平衡参数表示如下:
[0038]
p
bayes
∝
p
pre
·
p
obs
[0039][0040][0041]
损失基于最小化正确网格can
的差值d
,增加错误网格集{can-}的差值集d-={d
i-},计算如下:
[0042][0043]
进一步的,在步骤(3)中,对于给定城市的网格嵌入和每种类型的犯罪记录,目标犯罪类型c,目标时间t,持续时间t,输入进犯罪发生地点的预测模型得到在t 1,t 2,
…
,t t时间段的c型犯罪事件的风险网格嵌入,计算所有网格嵌入与预测风险网格嵌入的差值,差值最小的网格为当前时刻的预测风险网格。
[0044]
与现有技术相比,本发明的技术方案具有以下有益技术效果:
[0045]
(1)能对稀疏的犯罪类型进行预测。相比于现有的方法要么不区分不同的犯罪类型,要么只考虑常见的犯罪类型,本方法能够解决不同稀疏犯罪地点多时间段预测的问题,有利于社会保障和城市安全。
[0046]
(2)能更好地处理不连续和稀疏犯罪序列。本方法使用gru-ode-bayes来处理不连续和零星的犯罪事件序列。基于神经常微分方,提出了一种连续时间版本的门控递归单元,该单元可以在无观测值时插值预测,在有观测值时通过贝叶斯更新网络对模型进行修正,数据增强模块通过利用高相关性的犯罪类型的犯罪记录和相似城市地区的犯罪记录进行补充训练数据,邻近重复增强模块从附近区域的犯罪事件中提取上下文来增强短期连续预测。
附图说明
[0047]
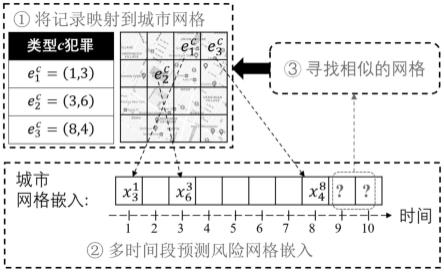
图1预测下t个时间段风险城市网格嵌入图;
[0048]
图2多时间段稀疏犯罪发生地点的模型图。
具体实施方式
[0049]
下面结合附图和具体实施例,进一步阐明本发明。
[0050]
本发明所述的城市环境下多时间段稀疏犯罪发生地点的预测流程,如图1所示,对于已经发生的犯罪事件通过模型预测多个时间的风险网格嵌入,然后寻找相似的网格即为预测的可能的犯罪发生的地点。一种城市环境下多时间段稀疏犯罪发生地点的预测方法包括城市空间和犯罪记录建模、门控循环网络-神经常微分方程-贝叶斯(后称gru-ode-bayes)犯罪地点预测模型、数据增强模块、邻近重复增强模块,实现如图2所示。
[0051]
具体执行步骤如下:
[0052]
(1)建立城市环境下多时间段的稀疏犯罪发生地点的预测模型,所述犯罪发生地点预测模型包括城市空间和犯罪记录建模、门控循环网络-神经常微分方程-贝叶斯(后称gru-ode-bayes)犯罪地点预测模型、数据增强模块、邻近重复增强模块;城市空间和犯罪记录建模来抽象数据输入到模型,gru-ode-bayes犯罪地点预测模型通过输入城市网格犯罪
特征来预测犯罪地点,数据增强模块通过利用高相关性的犯罪类型的犯罪记录和相似城市地区的犯罪记录进行补充训练数据,邻近重复增强模块从附近区域的犯罪事件中提取上下文来增强短期连续预测。
[0053]
(2)对于不同的犯罪类型使用损失函数进行犯罪发生地点预测模型训练,得到训练好的犯罪发生地点预测模型。
[0054]
(3)利用训练好的犯罪发生地点预测模型对犯罪发生地点进行预测。
[0055]
进一步的,其特征在于在步骤(1)中,所述的城市空间和犯罪记录建模描述如下:
[0056]
抽象地理城市空间为n个正方形网格对于在时间j第i个的网格的嵌入是对所有该区域嵌入信息的连接其中vi是环境嵌入,包括但不限于每个类别兴趣点的数量、建筑的功能、人员的流动强度等;li是位置嵌入,将网格的经纬度进行编码嵌入;是动态犯罪嵌入,通过划分时间段计算每个时间段网格内发生的犯罪事件数量,可以得到一天的周期特征d
day
、一周的周期特征d
week
、一个月的周期特征d
month
,拼接得到动态犯罪嵌入犯罪记录可表示为ec=(i,j),其含义为在网格i中发生在j时间段的类型为c的一起犯罪事件,则按照时间排序的犯罪事件列表可表示为对于一个犯罪事件ec=(i,j),使用相应的网格嵌入来表示它。
[0057]
进一步的,步骤(1)中所述的gru-ode-bayes犯罪地点预测模型描述如下:
[0058]
gru-ode-bayes犯罪地点预测模型包含两个部分,一个预测风险网格嵌入的gru-ode模块,一个利用零星的观测记录对模型进行修正的bayes update模块。对类型为c的犯罪进行预测,将犯罪列表ec输入到模型,对于第一个记录是模型从时间j1开始,在时间j1最初预测的风险网格嵌入为在第k 1个记录的时间j
k 1
之前,由gru-ode模块对下一个时间点的风险网格嵌入进行预测,计算如下:
[0059][0060]
当一个真实的犯罪记录被获取,预测的嵌入将被gru-bayes更新,计算如下:
[0061][0062]
计算所有网格嵌入与预测风险网格嵌入的差值,差值最小的网格为tk时刻的预测风险网格。
[0063]
进一步的,步骤(1)中所述的数据增强模块采用两种数据增强策略:跨类型迁移和跨网格迁移;
[0064]
跨类型迁移数据增强基于两种高度相关的犯罪类型ca和cb,cb可能在ca发生的很短时间内发生,通过计算犯罪类型间的共现率来衡量两种犯罪类型之间的关系,共现率定义为在一段时间内同一网格内不同犯罪类型发生的频率δt(超参数),可计算如下:
[0065][0066][0067][0068]
对于补充犯罪类型ca,选择另一个相关分数最高的犯罪类型cb,将eb加入ea,使ea更长。训练时,对eb样本的损失给出一个权重,即co-occ(ca,cb)。
[0069]
跨网格迁移数据增强基于两个特征相似的网格更有可能发生相同的犯罪事件,通过计算网格之间的相似度得分,并为每个网格gi找到m(一个超参数)个最相似的网格。将这些网格中的犯罪事件添加到ec中。网格ga和gb之间的相似度得分取网格的环境嵌入vi和vj的皮尔逊相关系数,其中计算如下:
[0070][0071]
对于网格ga的事件ec=(a,j),若ga是gb最相似的网格,则向ec中添加事件ec=(a,j)。
[0072]
进一步的,在步骤(1)中,邻近重复增强模块描述如下:
[0073]
选择50个犯罪概率最大的网格候选candidate={can1,can2,
…
,can
50
},对于每个网格cani,获取其周围网格canj在时间[j-δt,j)发生的犯罪事件,并按照时间排序,得到一个邻近区域重复事件列表ni={e1,e2,
…
,e
cnt
},输入到gru模型中得到邻近重复上下文nci=gru(ni),将预测嵌入和邻近重复上下文nci使用一个超参数β相加作为最终预测嵌入,和候选candi的真正网格嵌入之间的差异di由欧几里得距离计算得到,然后选择最小距离δi的
[0074][0075][0076]
进一步的,在步骤(2)中,使用损失函数进行犯罪发生地点预测模型训练描述如下:
[0077]
对于所有类型c的记录,我们使用长度为16的滑动窗口扫描ec。将每组的前15条记录作为输入,最后一条记录作为标签。以最小化损失值为目标来训练模型,损失函数由两部分组成,λ1和λ2是超参数,表示如下:
[0078][0079]
损失基于真实记录的负对数似然,对于一个观察记录可能发生犯罪的所有网格p
pre
的概率分布和相应的损失如下:
[0080][0081]
[0082]
其中f
obs
将隐藏状态转换为n个维度,o是gi的独热编码,然后根据实际观测记录校验得到的先验概率,用kl-divergence拟合分布,利用所有nc观测记录,α为平衡参数表示如下:
[0083]
p
bayes
∝
p
pre
·
p
obs
[0084][0085][0086]
损失基于最小化正确网格can
的差值d
,增加错误网格集{can-}的差值集d-={d
i-},计算如下:
[0087][0088]
进一步的,在步骤(3)中,对于给定城市的网格嵌入和每种类型的犯罪记录,目标犯罪类型c,目标时间t,持续时间t,输入进犯罪发生地点的预测模型得到在t 1,t 2,
…
,t t时间段的c型犯罪事件的风险网格嵌入,计算所有网格嵌入与预测风险网格嵌入的差值,差值最小的网格为当前时刻的预测风险网格。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。