1.本发明涉及一种目标检测技术,尤其涉及一种基于深度学习的白酒摘酒方法及其系统。
背景技术:
2.在白酒酿造的摘酒环节中,大部分酒厂仍然采用传统的“看花摘酒”。“看花摘酒”是指值守在流酒管旁的摘酒工人根据酒液滴在摘酒布或容器中形成酒花的大小、形状和停留时间等特征,对流出酒液的度数进行判断,再通过手动切换阀门等操作将不同的基酒分别存储。“看花摘酒”方法对摘酒工人的工作经验有很高的要求,不同的工人对摘酒时机的把握不同,同一个人在不同时候(如疲惫劳累、兴奋、生病等等)也会作出不同判断,所以具有很大的主观性,因此基酒质量难以精准控制,从而影响了白酒的质量,也极大地限制了白酒的产量。
3.此外,还有使用检测酒精浓度等仪器来进行摘酒,如在流酒管上安装酒精浓度检测仪、风味物质在线检测仪,检测相关物质进行量质摘酒。但相关检测仪器价格昂贵,难以实现大规模自动化摘酒。并且,流动酒质对仪器的安装和长久稳定使用有很大的影响,检测和摘酒也难以保持实时一致性。
4.而结合可见光和近红外光谱就酒液化学成分进行分析,并结合建立的分类模型对基酒进行等级分类(即摘酒)的方法存在以下缺陷:(1)普适性、推广性差,仪器状态和检测样品一旦改变,就要重建模型。(2)所需仪器和建模成本较高。(3)检测速度较慢,难以实现检测和摘酒的实时一致性。
5.研究表明,发现不同等级酒液的酒花具有差异性,并和酒精浓度具有紧密联系,故可使用基于计算机视觉的图像处理技术对酒花图像进行分类,进而对不同等级的酒液自动化分类,从而实现量质摘酒。此种办法成本低廉,稳定性高。但是目前都是分成多个独立步骤进行,并在每个步骤中寻求该部分的最优方法,因此最终结果并不能确保是整个问题的最优解决办法。此外,对员工的技术要求较高,在普及推广中也存在一定难度,且绝大部分方法还未达到检测的实时性要求。
技术实现要素:
6.本发明的目的是提供一种基于深度学习的白酒摘酒方法,利用轻量型yolov5对获取的酒花图像分析,即可对酒液分级,实现自动化量质摘酒,成本低廉,稳定性高。
7.为实现上述目的,本发明提供了一种基于深度学习的白酒摘酒方法,包括以下步骤:
8.s1、模型训练
9.向轻量型yolov5模型中输入酒花图像数据集,学习酒花特征与不同等级酒液之间的关系;
10.s2、图像获取
11.经图像采集装置拍摄由酒甑落入接酒装置形成的酒花,获得酒花图像;
12.s3、图像输入
13.向训练完毕的轻量型yolov5模型中输入步骤s2获得的酒花图像;
14.s4、模型检测
15.轻量型yolov5模型根据输入的酒花图像的酒花特征对酒花图像进行分类并输出分类结果;
16.s5、量质摘酒
17.将步骤s4的分类结果输入dcs系统中,dcs系统控制阀门将接酒装置流出的酒液分段装入存酒罐中。
18.优选的,轻量型yolov5模型为以yolov5s模型作为初始模型的改进,改进方法包括:
19.改进锚框:经k-mean聚类的锚框取代默认锚框,用于提高模型检测精度和稳定性;
20.改进主干网络:shufflenetv2网络替换yolov5s模型主干网络进行特征提取,用于进行轻量化改进,降低网络参数,减少计算量,提升检测网络的速度与精度;
21.增加注意力机制:增加cbam注意力机制,用于提高酒花特征关注度和检测精度。
22.优选的,shufflenetv2网络的输入通道经分离操作分为两个相等分支,其中一个分支遵循恒等映射,另一个分支通过2个1
×
1的普通卷积conv和1个3
×
3的深度卷积dwconv,然后将两个分支concat起来,使用channel shuffle启用两个分支之间的信息通。
23.优选的,cbam注意力机制包括通道注意力模块和空间注意力模块,通道注意力模块和空间注意力模块分别在通道和空间上进行attention。
24.优选的,对于一个特征图,cbam注意力机制按照先通道再空间的顺序先生成通道注意力图再生成二维空间注意力图,生成过程如下:
[0025][0026][0027]
式中,f——cbam输入特征图,mc(f)——通道注意力模块生成特征图,fc——空间注意力模块输入特征图,ms(fc)——空间注意力模块生成特征图,fs——cbam输出特征图。
[0028]
优选的,步骤s5具体包括以下步骤:
[0029]
步骤s4的分类结果输出至显示装置显示,同时dcs系统中的上位机根据分类结果下发指令至下位机,下位机根据指令控制阀门分段摘取。
[0030]
优选的,步骤s4中的酒花特征包括酒花纹理、酒花形状和酒花轮廓。
[0031]
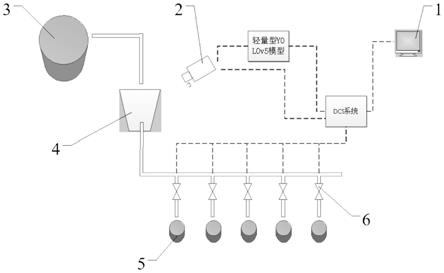
基于深度学习的白酒摘酒方法的系统,包括设置于接酒装置上方的图像采集装置、与所述图像采集装置相连的yolov5模型和与yolov5模型相连的dcs系统;
[0032]
所述接酒装置的出酒管上依次并列连接有多条出酒分支管,所述出酒分支管上设置有阀门,所述阀门与dcs系统相连;
[0033]
所述dcs系统还与显示装置相连。
[0034]
优选的,所述图像采集装置为工业相机。
[0035]
本发明的有益效果如下:
[0036]
1、对比传统的“看花摘酒”方法,本发明基于计算机视觉,可以稳定地保持高精度
摘酒,同时避免白酒酿造过程中人工操作可能带入的污染,避免摘酒工人在高温高湿环境中损害身体健康。
[0037]
2、对比使用检测仪器的分段摘酒方法,本发明的使用成本和维护成本更低。
[0038]
3、对比现有的基于计算机视觉的摘酒方法,本发明基于端到端的解决方法对操作员工的技术要求更低,更有利于推广。
[0039]
4、高效的检测速度进一步提升基酒质量,提高企业相关利润。
[0040]
5、低内存占用有助于嵌入式装置的布置,进一步节省企业成本。
[0041]
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
[0042]
图1为本发明的实施例一种基于深度学习的白酒摘酒方法的系统的结构示意图;
[0043]
图2为本发明的实施例一种基于深度学习的白酒摘酒方法的系统的shufflenetv2的基本单元结构图;
[0044]
图3为本发明的实施例一种基于深度学习的白酒摘酒方法的系统的shufflenetv2的空间下采样结构图;
[0045]
图4为本发明的实施例一种基于深度学习的白酒摘酒方法的系统的注意力机制结构图。
[0046]
其中:1、显示装置;2、图像采集装置;3、酒甑;4、接酒装置;5、存酒罐;6、阀门。
具体实施方式
[0047]
以下将结合附图对本发明作进一步的描述,需要说明的是,本实施例以本技术方案为前提,给出了详细的实施方式和具体的操作过程,但本发明的保护范围并不限于本实施例。
[0048]
图1为本发明的实施例一种基于深度学习的白酒摘酒方法的系统的结构示意图;图2为本发明的实施例一种基于深度学习的白酒摘酒方法的系统的shufflenetv2的基本单元结构图;图3为本发明的实施例一种基于深度学习的白酒摘酒方法的系统的shufflenetv2的空间下采样结构图;图4为本发明的实施例一种基于深度学习的白酒摘酒方法的系统的注意力机制结构图,如图1-图4所示,本发明包括以下步骤:
[0049]
s1、模型训练
[0050]
向轻量型yolov5模型中输入酒花图像数据集,学习酒花特征与不同等级酒液之间的关系;
[0051]
s2、图像获取
[0052]
经图像采集装置1拍摄由酒甑3落入接酒装置4形成的酒花,获得酒花图像;
[0053]
s3、图像输入
[0054]
向训练完毕的轻量型yolov5模型中输入步骤s2获得的酒花图像;
[0055]
s4、模型检测
[0056]
轻量型yolov5模型根据输入的酒花图像的酒花特征对酒花图像进行分类并输出分类结果;
[0057]
优选的,步骤s4中的酒花特征包括酒花纹理、酒花形状和酒花轮廓。
[0058]
s5、量质摘酒
[0059]
将步骤s4的分类结果输入dcs系统中,dcs系统控制阀门6将接酒装置4流出的酒液分段装入存酒罐5中。
[0060]
优选的,步骤s5具体包括以下步骤:
[0061]
步骤s4的分类结果输出至显示装置1显示,同时dcs系统中的上位机根据分类结果下发指令至下位机,下位机根据指令控制阀门6分段摘取。
[0062]
本实施例中,轻量型yolov5模型为以yolov5s模型作为初始模型的改进,改进方法包括:
[0063]
改进锚框:经k-mean聚类的锚框取代默认锚框,用于提高模型检测精度和稳定性;
[0064]
改进主干网络:shufflenetv2网络替换yolov5s模型主干网络进行特征提取,用于进行轻量化改进,降低网络参数,减少计算量,提升检测网络的速度与精度;
[0065]
与yolov5s初始模型相比,本文提出的轻量型yolov5模型占用内存减少92.5%,参数量减少93.7%,计算量降低63.4%,检测精度提升2.8%,fps高达526,可以很好的实现酒花实时检测分类。
[0066]
优选的,shufflenetv2网络的输入通道经分离操作分为两个相等分支,其中一个分支遵循恒等映射,另一个分支通过2个1
×
1的普通卷积conv和1个3
×
3的深度卷积dwconv,然后将两个分支concat起来,使用channel shuffle启用两个分支之间的信息通。
[0067]
增加注意力机制:增加cbam注意力机制,用于提高酒花特征关注度和检测精度。
[0068]
优选的,cbam注意力机制包括通道注意力模块和空间注意力模块,通道注意力模块和空间注意力模块分别在通道和空间上进行attention。
[0069]
优选的,对于一个特征图,cbam注意力机制按照先通道再空间的顺序先生成通道注意力图再生成二维空间注意力图,生成过程如下:
[0070][0071][0072]
式中,f——cbam输入特征图,mc(f)——通道注意力模块生成特征图,fc——空间注意力模块输入特征图,ms(fc)——空间注意力模块生成特征图,fs——cbam输出特征图。
[0073]
基于深度学习的白酒摘酒方法的系统,包括设置于接酒装置4上方的图像采集装置1、与所述图像采集装置1相连的yolov5模型和与yolov5模型相连的dcs系统;
[0074]
所述接酒装置4的出酒管上依次并列连接有多条出酒分支管,所述出酒分支管上设置有阀门6,所述阀门6与dcs系统相连;
[0075]
所述dcs系统还与显示装置1相连。
[0076]
优选的,所述图像采集装置1为工业相机。
[0077]
因此,本发明采用上述基于深度学习的白酒摘酒方法,利用轻量型yolov5对获取的酒花图像分析,即可对酒液分级,实现自动化量质摘酒,成本低廉,稳定性高。
[0078]
最后应说明的是:以上实施例仅用以说明本发明的技术方案而非对其进行限制,尽管参照较佳实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对本发明的技术方案进行修改或者等同替换,而这些修改或者等同替换亦不能使修改后的技术方案脱离本发明技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。