单通道sar运动舰船二维速度估计与重定位方法及装置
技术领域
1.本发明涉及合成孔径sar载荷平台成像技术领域,尤其涉及一种单通道sar运动舰船二维速度估计与重定位方法、装置、电子设备及介质。
背景技术:
2.高分辨率合成孔径sar载荷平台(synthetic aperture radar,sar)的全天时和全天候成像能力,使其在海洋监视方面具有其它手段无法替代的优势。由于海上舰船往往处于非合作的未知运动状态,传统sar成像方法聚焦的高分辨率图像结果中,运动目标一般呈现出方位向散焦、方位错位、运动信息难获取的问题,这对海上目标细节的辨认、几何定位和航迹判断带来不便。
3.针对海上舰船运动速度的估计,传统的方法是基于沿航迹向布设多个通道,通过沿航迹干涉(along track interference,ati)或偏置相位中心(displaced phase center antenna,dpca)得出距离向一个方向的速度[wang c , liao g , zhang q . first spaceborne sar-gmti experimental results for the chinese gaofen-3 dual-channel sar sensor[j]. sensors, 2017, 17(12):2683]。ati方法能较好的估计出运动目标的距离向速度。基于单通道的运动速度估计,一般可以通过自聚焦处理的方法估计出方位向速度,而无法对距离向速度做出估计,也就无法获得舰船的速度矢量及重定位参数。现有单通道sar运动舰船速度估计方法,一般是先估计方位向速度,之后通过多普勒中心估计、舰船尾迹等方法实现对距离向速度的估计,二者矢量合成得到舰船实际速度。在面向实际应用中,这些方法存在一定的问题。
[0004]
基于ati与dpca的方法,在大多数情况下能估计出目标的距离向速度,并进行重定位。但该方法要求sar载荷具有多通道数据采集能力,至少需要沿方位向两个独立通道,这增加了载荷硬件系统的复杂度和研制成本。针对大量的单通道sar系统,该方法无法使用。基于单通道sar多普勒中心估计的方法。多普勒中心频率的估计往往需要大量均匀场景图像作为输入,才能估计得到较精确多普勒中心,这对于由大量杂乱强散射体构成的舰船图像,显然是不满足场景均匀和场景足够大的条件,因而多普勒中心估计的精度无法保证。基于舰船尾迹的方法,要求海面能发现明显的开尔文尾迹,并进行精确的检测。在实际数据中,面临着尾迹不存在或不明显导致的检测困难、检测计算量大、参数估计误差大、难以自动化流程实现等问题。
技术实现要素:
[0005]
鉴于上述问题,本发明提供了一种单通道sar运动舰船二维速度估计与重定位方法,以解决上述技术问题。
[0006]
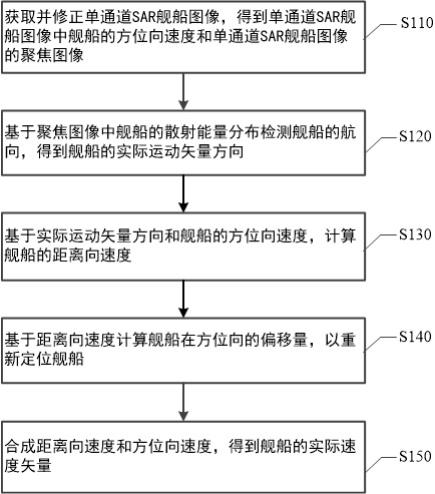
本发明的一个方面提供了一种单通道sar运动舰船二维速度估计与重定位方法,包括:获取并修正单通道sar舰船图像,得到所述单通道sar舰船图像中舰船的方位向速度和所述单通道sar舰船图像的聚焦图像;基于所述聚焦图像中舰船的散射能量分布检测所
述舰船的航向,得到所述舰船的实际运动矢量方向;基于所述实际运动矢量方向和所述舰船的方位向速度,计算所述舰船的距离向速度;基于所述距离向速度计算所述舰船在方位向的偏移量,以重新定位所述舰船;以及合成所述距离向速度和所述方位向速度,得到所述舰船的实际速度矢量。
[0007]
可选地,所述获取并修正单通道sar舰船图像,得到所述单通道sar舰船图像中舰船的方位向速度和所述单通道sar舰船图像的聚焦图像包括:获取所述舰船的单通道sar舰船图像;基于所述单通道sar舰船图像的信号构建所述单通道sar舰船图像中舰船的距离-多普勒域信号模型,提取所述舰船在方位向的误差相位;基于所述误差相位,计算所述舰船的方位向速度;基于所述误差相位,对所述单通道sar舰船图像进行重聚焦,得到所述聚焦图像。
[0008]
可选地,所述获取所述舰船的单通道sar舰船图像包括:获取sar载荷平台探测所述舰船得到的sar回波传统成像,将所述sar回波传统成像处理为单视复数图像;设置二维窗截取所述单视复数图像中的舰船图像,得到所述单通道sar舰船图像。
[0009]
可选地,所述基于所述单通道sar舰船图像的信号构建所述单通道sar舰船图像中舰船的距离-多普勒域信号模型,提取所述舰船在方位向的误差相位包括:构建所述单通道sar舰船图像中舰船的距离-多普勒域信号模型;对所述舰船距离-多普勒域信号模型进行相干累积处理,得到所述舰船的相干累积信号;基于所述舰船的相干累积信号提取所述舰船在方位向的误差相位。
[0010]
可选地,所述舰船的距离-多普勒域信号模型的函数表示包括:;;其中,sm(tr,fa)表示所述舰船的距离-多普勒域信号模型的函数, sinc(
∙
)表示矩形函数的傅里叶变换,br表示sar载荷平台距离向信号带宽,tr表示距离向时间,wa表示方位多普勒频谱窗,fa表示多普勒频率,f
ac
表示所述舰船的多普勒频率中心,r0表示所述舰船与sar载荷平台之间的最近斜距,λ表示sar载荷平台波长,c表示光速,y0表示所述舰船的起始位置在距离向的坐标,v
eff
=v
s-v
x
,vs表示sar载荷平台速度,v
x
表示所述舰船的方位向速度,vy表示所述舰船的距离向速度,vi表示vs或v
eff
。
[0011]
可选地,所述对所述舰船距离-多普勒域信号模型进行相干累积处理,得到所述舰船的相干累积信号包括:对所述舰船距离-多普勒域信号模型进行傅里叶变换,得到所述舰船的相干累积信号,对所述舰船距离-多普勒域信号模型进行傅里叶变换的计算公式为:
;其中,sm(tr,fa)表示所述舰船的距离-多普勒域信号模型的函数,sinc(
∙
)表示矩形函数的傅里叶变换,tr表示距离向时间,ta表示方位向时间,t
syn
(
∙
)表示合成孔径时间长度,fa表示多普勒频率,r0表示所述舰船与sar载荷平台之间的最近斜距,λ表示sar载荷平台波长,v
eff
=v
s-v
x
,vs表示sar载荷平台速度,v
x
表示所述舰船的方位向速度,vy表示所述舰船的距离向速度。
[0012]
可选地,所述基于所述误差相位,计算所述舰船的方位向速度的计算公式包括:;其中,vs表示sar载荷平台速度,v
x
表示所述舰船的方位向速度,r0表示所述舰船与sar载荷平台之间的最近斜距,λ表示sar载荷平台波长,p2表示所述误差相位的二次项系数。
[0013]
可选地,所述基于所述实际运动矢量方向和所述舰船的方位向速度,计算所述舰船的距离向速度包括:获取所述舰船与sar载荷平台之间的距离向坐标轴,计算所述实际运动矢量方向与所述距离向坐标轴之间的夹角;基于所述夹角和所述方位向速度,计算所述距离向速度,计算公式包括:;其中,v
x
表示所述舰船的方位向速度,vy表示所述舰船的距离向速度,a表示所述实际运动矢量方向与所述距离向坐标轴之间的夹角。
[0014]
可选地,所述基于所述距离向速度计算所述舰船在方位向的偏移量的计算公式包括:;其中,ta表示所述舰船在方位向的偏移量,vy表示所述舰船的距离向速度,r0表示所述舰船与sar载荷平台之间的最近斜距,vs表示sar载荷平台速度。
[0015]
本发明的另一方面提供了一种单通道sar运动舰船二维速度估计与重定位装置,包括:图像聚焦模块,用于获取并修正单通道sar舰船图像,得到所述单通道sar舰船图像中舰船的方位向速度和所述单通道sar舰船图像的聚焦图像;方向检测模块,用于基于所述聚焦图像中舰船的散射能量分布检测所述舰船的航向,得到所述舰船的实际运动矢量方向;速度估算模块,用于基于所述实际运动矢量方向和所述舰船的方位向速度,计算所述舰船的距离向速度;重定位模块,用于基于所述距离向速度计算所述舰船在方位向的偏移量,以重新定位所述舰船;以及速度矢量合成模块,用于合成所述距离向速度和所述方位向速度,得到所述舰船的实际速度矢量。
[0016]
在本发明实施例采用的上述至少一个技术方案能够达到以下有益效果:本发明实施例提供了一种单通道sar运动舰船二维速度估计与重定位方法,利用
高分辨率sar舰船重聚焦后舰船散射体能量的分布沿航向方向分布的特点,在图像域中对航向进行检测,在得到较准确航向后,基于矢量合成与正交分解原理,计算距离向速度,能够得到稳定的结果,不存在速度模糊的问题。该方法在估计得到距离向速度后,直接通过计算即可以给出运动舰船在方位向位置的偏移,对舰船进行重定位。相比于基于尾迹的重定位方法,本发明提供的方法在实际应用中具有更高的可行性。
附图说明
[0017]
为了更完整地理解本发明及其优势,现在将参考结合附图的以下描述,其中:图1示意性示出了本发明一实施例提供的一种单通道sar运动舰船二维速度估计与重定位方法的主流程图;图2示意性示出了本发明一实施例提供的一种单通道sar运动舰船二维速度估计与重定位方法的具体流程示意图;图3示意性示出了本发明实施例提供的一种单通道sar运动舰船二维速度估计与重定位装置的结构框图。
具体实施方式
[0018]
以下,将参照附图来描述本发明的实施例。但是应该理解,这些描述只是示例性的,而并非要限制本发明的范围。在下面的详细描述中,为便于解释,阐述了许多具体的细节以提供对本发明实施例的全面理解。然而,明显地,一个或多个实施例在没有这些具体细节的情况下也可以被实施。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
[0019]
在此使用的术语仅仅是为了描述具体实施例,而并非意在限制本发明。在此使用的术语“包括”、“包含”等表明了所述特征、步骤、操作和/或部件的存在,但是并不排除存在或添加一个或多个其他特征、步骤、操作或部件。
[0020]
在此使用的所有术语(包括技术和科学术语)具有本领域技术人员通常所理解的含义,除非另外定义。应注意,这里使用的术语应解释为具有与本说明书的上下文相一致的含义,而不应以理想化或过于刻板的方式来解释。
[0021]
附图中示出了一些方框图和/或流程图。应理解,方框图和/或流程图中的一些方框或其组合可以由计算机程序指令来实现。这些计算机程序指令可以提供给通用计算机、专用计算机或其他可编程数据处理装置的处理器,从而这些指令在由该处理器执行时可以创建用于实现这些方框图和/或流程图中所说明的功能/操作的装置。
[0022]
因此,本发明的技术可以硬件和/或软件(包括固件、微代码等)的形式来实现。另外,本发明的技术可以采取存储有指令的计算机可读介质上的计算机程序产品的形式,该计算机程序产品可供指令执行系统使用或者结合指令执行系统使用。在本发明的上下文中,计算机可读介质可以是能够包含、存储、传送、传播或传输指令的任意介质。例如,计算机可读介质可以包括但不限于电、磁、光、电磁、红外或半导体系统、装置、器件或传播介质。计算机可读介质的具体示例包括:磁存储装置,如磁带或硬盘(hdd);光存储装置,如光盘(cd-rom);存储器,如随机存取存储器(ram)或闪存;和/或有线/无线通信链路。
[0023]
本发明提出了一种单通道sar运动舰船二维速度估计与重定位,用于实现舰船重
聚焦和重定位。该方法以sar图像中散焦的舰船图像为输入,首先基于方位向图像自聚焦的方法,对舰船方位向误差相位进行估计和补偿,获得良好聚焦图像;其次,基于所估计的误差相位,用多项式拟合方法估计方位向运动参数;另一方面,在获得高分辨率重聚焦图像情况下,通过对舰船在单视复数图像中的航向进行检测,得到实际舰船运动矢量的方向,根据矢量合成法则,得到距离向速度的估计值,基于该估计值,可对舰船图像进行重定位。最终由距离向速度与方位向速度的矢量合成,得到舰船的实际运动速度与方向。
[0024]
图1示意性示出了本发明一实施例提供的一种单通道sar运动舰船二维速度估计与重定位方法的流程图。
[0025]
如图1所示,本发明实施例提供的一种单通道sar运动舰船二维速度估计与重定位方法包括操作s110~s150。
[0026]
在操作s110,获取并修正单通道sar舰船图像,得到单通道sar舰船图像中舰船的方位向速度和单通道sar舰船图像的聚焦图像。
[0027]
在操作s120,基于聚焦图像中舰船的散射能量分布检测舰船的航向,得到舰船的实际运动矢量方向。
[0028]
在操作s130,基于实际运动矢量方向和舰船的方位向速度,计算舰船的距离向速度。
[0029]
在操作s140,基于距离向速度计算舰船在方位向的偏移量,以重新定位舰船。
[0030]
在操作s150,合成距离向速度和方位向速度,得到舰船的实际速度矢量。
[0031]
根据上述方法,利用舰船不同方向速度采用不同估计方法的策略,基于回波相位调制和运动参数在信号中的对应关系、航向矢量合成关系,分别实现方位向速度与距离向速度的估计,进而得到矢量合成后舰船的实际速度。具体的,由于高分辨率sar舰船数据重聚焦后,舰船图像在海面背景上存在较高对比度,利用高分辨率sar舰船重聚焦后,舰船散射体能量的分布沿航向方向分布的特点,可以得到舰船合速度矢量在单视复数图像斜平面内的方向;在得到方位速度后,基于矢量合成和正交分解原理,即可以计算出距离向速度大小,进而通过与方位向速度正交合成得到实际速度。进一步的,基于距离向速度估计值,可计算出舰船在方位向位置的偏移量,从而对舰船图像重定位。
[0032]
图2示意性示出了本发明实施例提供的一种单通道sar运动舰船二维速度估计与重定位方法的具体流程示意图。
[0033]
如图2所示,本发明提供的单通道sar运动舰船二维速度估计与重定位方法具体描述如下。
[0034]
在操作s210,获取舰船的单通道sar舰船图像。
[0035]
具体的,操作s210包括s211~s212。
[0036]
在操作s211,基于海面与舰船散射特性的差异分析,在获取sar载荷平台探测舰船得到的sar回波传统成像后,将sar回波传统成像处理为单视复数图像。
[0037]
在操作s212,设置二维窗截取单视复数图像中的舰船图像,得到单通道sar舰船图像。
[0038]
在操作s220,基于单通道sar舰船图像的信号构建单通道sar舰船图像中舰船的距离-多普勒域信号模型,提取舰船在方位向的误差相位。
[0039]
具体的,操作s220包括s221~s223。
[0040]
在操作s221,构建单通道sar舰船图像中舰船的距离-多普勒域信号模型。
[0041]
由于运动误差是在方位时间域积累导致图像散焦,直接在散焦图像只能估计方位频域的误差相位,因此算法重建其时域的距离多普勒相位历程。基于sar成像的几何模型,对海面运动舰船的回波加入二维运动的修正量,构建了运动舰船在回波中的信号模型,模型中界定了不同的运动参量与不同回波调制量的函数关系,在只考虑二维速度的情况下,其在距离-多普勒域中信号模型可以表示为:;;其中,sm(tr,fa)表示舰船的距离-多普勒域信号模型的函数, sinc(
∙
)表示矩形函数的傅里叶变换,br表示sar载荷平台距离向信号带宽,tr表示距离向时间,wa表示方位多普勒频谱窗,fa表示多普勒频率,f
ac
表示舰船的多普勒频率中心,r0表示舰船与sar载荷平台之间的最近斜距,λ表示sar载荷平台波长,c表示光速,y0表示舰船的起始位置在距离向的坐标,v
eff
=v
s-v
x
,vs表示sar载荷平台速度,v
x
表示舰船的方位向速度,vy表示舰船的距离向速度,vi表示vs或v
eff
。
[0042]
在操作s222,基于方位deramp进行对数据进行压缩处理,得到频域的散焦子图像。对舰船距离-多普勒域信号模型进行相干累积处理,得到舰船的相干累积信号。
[0043]
对舰船距离-多普勒域信号模型进行傅里叶变换的计算公式为:;其中,sm(tr,fa)表示舰船的距离-多普勒域信号模型的函数,sinc(
∙
)表示矩形函数的傅里叶变换,tr表示距离向时间,ta表示方位向时间,t
syn
(
∙
)表示合成孔径时间长度,fa表示多普勒频率,r0表示舰船与sar载荷平台之间的最近斜距,λ表示sar载荷平台波长,v
eff
=v
s-v
x
,vs表示sar载荷平台速度,v
x
表示舰船的方位向速度,vy表示舰船的距离向速度。在计算误差相位前,公式里面的速度vy是个位置数,是个符号表示。
[0044]
由于误差相位的存在,其频域聚焦图像为理想聚焦结果与一个散焦函数的卷积。在此子图像内,海面杂波散射相对均匀无序、而舰船则存在大量强散射点,背景与目标间具有较强的对比度。
[0045]
在操作s223,基于舰船的相干累积信号提取舰船在方位向的误差相位。对信号矢量,求其角度即可,角度的积分就是相位。
[0046]
在操作s230,基于误差相位,计算舰船的方位向速度。
[0047]
基于舰船相干积累后的信号,能够在高信杂比条件下,对误差相位进行提取,采用相位梯度自聚焦或最小化熵方法,对其进行沿方位向的误差相位估计。根据构建的信号模型,基于估计所得的方位向误差相位,可以估计舰船方位向速度,如下式所示:;其中,vs表示sar载荷平台速度,v
x
表示舰船的方位向速度,r0表示舰船与sar载荷平台之间的最近斜距,λ表示sar载荷平台波长,p2表示误差相位的二次项系数。
[0048]
在操作s240,基于误差相位,对单通道sar舰船图像进行重聚焦,得到聚焦图像。
[0049]
在操作s250,基于聚焦图像中舰船的散射能量分布检测舰船的航向,得到舰船的实际运动矢量方向。具体的,对重聚焦的舰船图像进行直线检测,选取主能量分布最大的直线方向,得到航向与距离向坐标轴的夹角α。
[0050]
在操作s260,基于实际运动矢量方向和舰船的方位向速度,计算舰船的距离向速度。
[0051]
计算距离向速度的公式包括:;其中,v
x
表示舰船的方位向速度,vy表示舰船的距离向速度,α表示实际运动矢量方向与距离向坐标轴之间的夹角。
[0052]
在操作s270,基于距离向速度计算舰船在方位向的偏移量,以重新定位舰船。
[0053]
偏移量的计算公式包括:;其中,ta表示舰船在方位向的偏移量,vy表示舰船的距离向速度,r0表示舰船与sar载荷平台之间的最近斜距,vs表示sar载荷平台速度。
[0054]
在操作s280,合成距离向速度和方位向速度,得到舰船的实际速度矢量。
[0055]
上述方法利用了高分辨率sar舰船重聚焦后,舰船散射体能量的分布沿航向方向分布的特点。在图像域中,对航向进行检测,具有估计精度高、鲁棒性强、无需先验参数的优点。在得到较准确航向后,基于矢量合成与正交分解原理,计算距离向速度,能够得到稳定的结果,不存在速度模糊的问题。在估计得到距离向速度后,直接通过计算即可以给出运动舰船在方位向位置的偏移,对舰船进行重定位。相比于基于尾迹的重定位方法,本发明提供的方法在实际应用中具有更高的可行性。
[0056]
图3示意性示出了本发明实施例提供的一种单通道sar运动舰船二维速度估计与重定位装置的结构框图。
[0057]
如图3所示,本发明实施例提供的通道sar运动舰船二维速度估计与重定位装置300包括图像聚焦模块310、方向检测模块320、速度估算模块330、重定位模块340和速度矢量合成模块350。
[0058]
图像聚焦模块310,用于获取并修正单通道sar舰船图像,得到单通道sar舰船图像
中舰船的方位向速度和单通道sar舰船图像的聚焦图像。
[0059]
方向检测模块320,用于基于聚焦图像中舰船的散射能量分布检测舰船的航向,得到舰船的实际运动矢量方向。
[0060]
速度估算模块330,用于基于实际运动矢量方向和舰船的方位向速度,计算舰船的距离向速度。
[0061]
重定位模块340,用于基于距离向速度计算舰船在方位向的偏移量,以重新定位舰船。
[0062]
速度矢量合成模块350,用于合成距离向速度和方位向速度,得到舰船的实际速度矢量。
[0063]
需要说明的是,本实施例提供的通道sar运动舰船二维速度估计与重定位装置300与如图1~2所示的通道sar运动舰船二维速度估计与重定位方法相同的具有相同的技术特征和技术效果,故在此不再赘述。
[0064]
可以理解的是,图像聚焦模块310、方向检测模块320、速度估算模块330、重定位模块340和速度矢量合成模块350可以合并在一个模块中实现,或者其中的任意一个模块可以被拆分成多个模块。或者,这些模块中的一个或多个模块的至少部分功能可以与其他模块的至少部分功能相结合,并在一个模块中实现。根据本发明的实施例,本发明实施例提供的通道sar运动舰船二维速度估计与重定位装置300中的至少一个可以至少被部分地实现为硬件电路,例如现场可编程门阵列(fpga)、可编程逻辑阵列(pla)、片上系统、基板上的系统、封装上的系统、专用集成电路(asic),或可以以对电路进行集成或封装的任何其他的合理方式等硬件或固件来实现,或以软件、硬件以及固件三种实现方式的适当组合来实现。或者,图像聚焦模块310、方向检测模块320、速度估算模块330、重定位模块340和速度矢量合成模块350中的至少一个可以至少被部分地实现为计算机程序模块,当该程序被计算机运行时,可以执行相应模块的功能。
[0065]
本领域技术人员可以理解,本发明的各个实施例中记载的特征可以进行多种组合或/或结合,即使这样的组合或结合没有明确记载于本发明中。特别地,在不脱离本发明精神和教导的情况下,本发明的各个实施例中记载的特征可以进行多种组合和/或结合。所有这些组合和/或结合均落入本发明的范围。
[0066]
尽管已经参照本发明的特定示例性实施例示出并描述了本发明,但是本领域技术人员应该理解,在不背离所附实施例及其等同物限定的本发明的精神和范围的情况下,可以对本发明进行形式和细节上的多种改变。因此,本发明的范围不应该限于上述实施例,而是应该不仅由所附实施例来进行确定,还由所附实施例的等同物来进行限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
