技术特征:
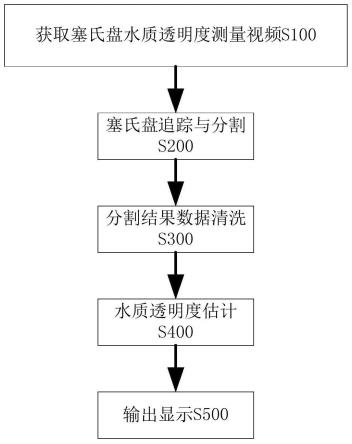
1.一种基于深度学习的无水尺塞氏盘水质透明度检测方法,其特征在于,包括以下步骤:步骤1、获取塞氏盘水质透明度测量视频;步骤2、对步骤1获取的视频进行图像处理识别,得到所述视频第一帧中塞氏盘位置作为塞氏盘的初始位置;然后采用基于2d卷积的siamfc 网络根据塞氏盘初始位置,对视频其他帧中塞氏盘位置进行追踪得到追踪结果,并将每一帧的追踪结果从视频对应帧中分割出来作为分割结果;步骤3、采用基于3d卷积的判别器,对步骤2得到的分割结果进行数据清洗处理得到塞氏盘的临界位置,然后从所述分割结果中去除塞氏盘临界位置之后的部分,分割结果中剩下部分保留;步骤4、对步骤3得到的分割结果中剩下部分进行特征提取,然后采用循环网络bi-lstm基于提取的特征计算得到水质透明度计算结果。2.根据权利要求1所述的一种基于深度学习的无水尺塞氏盘水质透明度检测方法,其特征在于,步骤2过程如下;步骤2-1、采用opencv中的selectroi函数对所述视频进行图像处理识别,通过opencv中的selectroi函数初始化所述视频第一帧中塞氏盘的检测框坐标,作为塞氏盘的初始位置;步骤2-2、将所述视频其他帧逐帧输入至siamfc 网络中,由siamfc 网络根据塞氏盘的初始位置追踪视频其他帧中塞氏盘检测框框定的区域作为追踪结果;然后基于视频其他帧中塞氏盘的检测框坐标,从视频其他帧中分别将所述追踪结果分割出来作为分割结果。3.根据权利要求2所述的一种基于深度学习的无水尺塞氏盘水质透明度检测方法,其特征在于,步骤2-2中,以追踪得到的视频其他帧中置信度最大的塞氏盘检测框框定的区域作为追踪结果,并基于置信度最大的塞氏盘检测框的坐标,将追踪结果分割出来作为分割结果。4.根据权利要求1或2或3所述的一种基于深度学习的无水尺塞氏盘水质透明度检测方法,其特征在于,步骤2中,所述的siamfc 网络以shufflenetv2为主干网络搭建;对于每一张输入图片,由siamfc 输出行大小为h、列大小为w的坐标矩阵和置信度矩阵,故共有h*w个检测框的坐标和h*w个检测框的置信度;每个检测框的坐标记为[x
i
, y
i
, h
i
, w
i
],其中x
i
、y
i
分别代表检测框的左上角的坐标,h
i
、w
i
分别代表检测框的高和宽,且有1≤i≤h*w;每个检测框的置信度位于0到1之间。5.根据权利要求4所述的一种基于深度学习的无水尺塞氏盘水质透明度检测方法,其特征在于,所述的siamfc 网络中,行大小h和列大小w均设置为17。6.根据权利要求1所述的一种基于深度学习的无水尺塞氏盘水质透明度检测方法,其特征在于,步骤3过程如下:步骤3-1、设步骤2得到的分割结果共有n个,并以分割结果中每连续的k个为一组得到多组,将得到的多组作为所述判别器的输入,由判别器输出n-k 1个概率值,每个概率值的范围为(0,1);步骤3-2、根据步骤3-1得到的n-k 1个概率值确定塞氏盘临界位置,其中:若n-k 1个概率值中存在大小为0.5的概率值,则以0.5第一次出现的位置作为塞氏盘
的临界位置;若n-k 1个概率值中不存在大小为0.5的概率值,则将n-k 1个概率值存放在一个一维数组中,用滑框从所述一维数组的起始位置开始以固定步长进行滑动,每滑动一次统计滑框内概率值大于0.5和小于0.5的个数,当概率值大于0.5的个数大于概率值小于0.5的个数时,此时滑框的中心位置就是所述塞氏盘的临界位置;步骤3-3、从所述分割结果中去除塞氏盘临界位置之后的部分,分割结果中剩下部分保留。7.根据权利要求1或6所述的一种基于深度学习的无水尺塞氏盘水质透明度检测方法,其特征在于,所述判别器包括5层网络,其中:第1层网络包括64个大小为[5,5,1]的3d卷积核,卷积步长为[1,1,1],第1层网络输入大小为56*56*3*8、输出大小为56*56*64*8;第2层网络包括128个大小为[3,3,1]的3d卷积核,卷积步长为[2,2,1],第2层网络输入大小为56*56*64*8、输出大小为28*28*128*8;第3层网络包括256个大小为[3,3,1]的3d卷积核,卷积步长为[2,2,1],第3层网络输入大小为28*28*128*8、输出大小为14*14*256*8;第4层网络包括512个大小为[3,3,1]的3d卷积核,卷积步长为[2,2,1],第4层网络输入大小为14*14*256*8、输出大小为7*7*512*8;第5层网络包括平均池化层、全连接层、激活层,其中激活层的激活函数使用sigmoid函数,第5层网络输入大小为7*7*512*8、输出大小为1*1*1*1。8.根据权利要求1所述的一种基于深度学习的无水尺塞氏盘水质透明度检测方法,其特征在于,步骤4中,首先将步骤3分割结果中剩下部分转换为灰度图,然后对所述灰度图中每个像素所在区间进行统计,基于统计结果建立一维特征向量;接着对一维特征向量进行归一化处理,以归一化处理结果作为提取的特征。9.根据权利要求1或8所述的一种基于深度学习的无水尺塞氏盘水质透明度检测方法,其特征在于,步骤4中,所述循环网络bi-lstm以提取的特征作为输入,循环网络bi-lstm输出连接至一个两层的全连接网络,最终由所述全连接网络输出水质透明度计算结果。
技术总结
本发明公开了一种基于深度学习的无水尺塞氏盘水质透明度检测方法,包括以下步骤:步骤1、获取塞氏盘水质透明度测量视频;步骤2、确定塞氏盘初始位置;然后采用SiamFC 网络根据塞氏盘初始位置对视频其他帧中塞氏盘位置进行追踪,并将每一帧的追踪结果分割出来作为分割结果;步骤3、采用判别器对步骤2得到的分割结果进行数据清洗得到塞氏盘的临界位置,然后从分割结果中去除塞氏盘临界位置之后的部分;步骤4、对步骤3得到的分割结果中剩下部分进行特征提取,然后采用循环网络Bi-Lstm基于提取的特征计算得到水质透明度计算结果。本发明不需要观察水尺,避免了读水尺引起的诸多不便,大大提高了测量速度和准确性。大大提高了测量速度和准确性。大大提高了测量速度和准确性。
技术研发人员:林峰 甘力博
受保护的技术使用者:浙江大学
技术研发日:2022.07.15
技术公布日:2022/10/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。