技术特征:
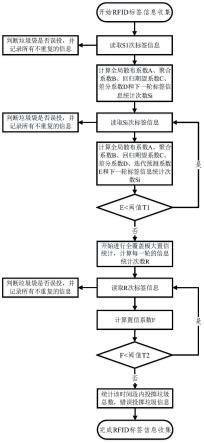
1.一种基于无源rfid的垃圾袋信息收集方法,包括如下步骤:(1)预设rfid标签各字段信息,并将rfid条贴在垃圾袋上,同时在垃圾桶内安装一个rfid标签阅读器;(2)利用rfid标签阅读器对垃圾桶内的垃圾袋进行第一轮标签信息读取,第一轮的读取次数s1为预先设定,每次读取仅接受一条标签响应并记录该标签信息,因此总共会接收到s1条标签响应,若这s1条标签响应来自m个标签,则统计本轮检测到的这m个标签各自的响应次数以及最长连续响应次数,并以此计算下一轮的读取次数;(3)从第二轮开始,每一轮的读取次数由上一轮计算得到,并将检测到的新标签记录下来,除此之外还需要计算每一轮的迭代预测系数,并将迭代预测系数与阈值进行比较,若小于阈值,则进行下一轮;若大于等于阈值,则进入后续轮,并计算出后续轮的读取次数r;(4)后续轮的读取次数r固定,每次读取仅接受一条标签响应并记录该标签信息,因此总共会接收到r条标签响应,若这r条标签响应来自p个标签,如其中存在新标签则记录下来,进而统计本轮检测到的这p个标签各自的响应次数以及最长响应间隔,以此计算本轮的置信系数;(5)将置信系数与阈值进行比较,若小于阈值,则根据步骤(4)进行下一轮;若大于等于阈值,则停止,并根据之前记录下来的标签信息确定垃圾桶内的垃圾袋总数量以及错误投掷的垃圾袋数量。2.根据权利要求1所述的垃圾袋信息收集方法,其特征在于:所述步骤(1)中预设rfid标签各字段信息,将标签中第1~8位设为所在城市区域信息,9~16位设为街道信息,17~32位设为小区信息,33~44位设为家庭单元户信息,45~47位设为垃圾类型信息,48位设为误投标志,49~64位设为序列号,剩下的为保留位。3.根据权利要求1所述的垃圾袋信息收集方法,其特征在于:对于第i 1轮,其读取次数s
i 1
的计算表达式如下:其中:a
i
和a
i-1
分别为第i轮和第i-1轮的全局散布系数,a
max
为a1~a
i
的最大值,b
i
为第i轮的聚合系数,b
max
为b1~b
i
的最大值,δ为预设参数,s
i
为第i轮的读取次数,i为大于0的自然数,a0=0;若算得的s
i 1
>1.2s
max
,则将s
i 1
限制为1.2s
max
,s
max
为s1~s
i
的最大值;若算得的s
i 1
<0.8s
min
,则将s
i 1
限制为0.8s
min
,s
min
为s1~s
i
的最小值。4.根据权利要求3所述的垃圾袋信息收集方法,其特征在于:所述全局散布系数a
i
的表达式如下:
其中:x
j
为第i轮检测到第j个标签的响应次数,g1和g2为给定的权重值,x
avg
为第i轮检测到所有标签响应次数的平均值。5.根据权利要求3所述的垃圾袋信息收集方法,其特征在于:所述聚合系数b
i
的表达式如下:其中:x
j
为第i轮检测到第j个标签的响应次数,y
j
为第i轮检测到第j个标签的最长连续响应次数,x
avg
为第i轮检测到所有标签响应次数的平均值,x
max
为第i轮检测到所有标签响应次数的最大值。6.根据权利要求1所述的垃圾袋信息收集方法,其特征在于:对于第i轮,其迭代预测系数e
i
的计算表达式如下:其中:α、β1和β2为预设参数,a
i
为第i轮的全局散布系数,b
i
为第i轮的聚合系数,c
i
为第i轮的回归期望系数,d
i
为第i轮的差分系数,d
max
为d1~d
i
的最大值,d
avg
为d1~d
i
的平均值,c
max
为c1~c
i
的最大值,b
avg
为b1~b
i
的平均值,i为大于0的自然数。7.根据权利要求6所述的垃圾袋信息收集方法,其特征在于:所述回归期望系数c
i
的表达式如下:其中:x
j
为第i轮检测到第j个标签的响应次数,x
max
为第i轮检测到所有标签响应次数的最大值,y
j
为第i轮检测到第j个标签的最长连续响应次数,y
max
为第i轮检测到所有标签最长连续响应次数的最大值,ρ为预设参数。8.根据权利要求6所述的垃圾袋信息收集方法,其特征在于:所述差分系数d
i
的表达式如下:
其中:x
j
为第i轮检测到第j个标签的响应次数,x
avg
为第i轮检测到所有标签响应次数的平均值,x
max
为第i轮检测到所有标签响应次数的最大值,y
j
为第i轮检测到第j个标签的最长连续响应次数,y
avg
为第i轮检测到所有标签最长连续响应次数的平均值,y
max
为第i轮检测到所有标签最长连续响应次数的最大值,λ为预设参数。9.根据权利要求1所述的垃圾袋信息收集方法,其特征在于:对于第i轮,若其迭代预测系数e
i
大于等于阈值,则通过以下表达式计算后续轮的读取次数r;其中:s
max
为s1~s
i
的最大值,s
min
为s1~s
i
的最小值,s
avg
为s1~s
i
的平均值,s
i
为第i轮的读取次数,i为大于0的自然数;若算得的r>1.3s
max
,则将r限制为1.3s
max
;若算得的r<0.9s
min
,则将r限制为0.9s
min
。10.根据权利要求1所述的垃圾袋信息收集方法,其特征在于:所述步骤(4)中置信系数的计算表达式如下:的计算表达式如下:其中:f为本轮的置信系数,x
k
为本轮检测到第k个标签的响应次数,z
k
为本轮检测到第k个标签的最长响应间隔,g
k
对应为z
k
的权重系数,g3和g4为给定的权重值,φ和γ为预设参数,x
a
为本轮检测到所有标签响应次数的平均值,x
m
为本轮检测到所有标签响应次数的最大值,z
avg
为本轮检测到所有标签最长响应间隔的平均值,a
m
为后续轮之前所有轮全局散布系数的最大值,c
m
为后续轮之前所有轮回归期望系数的最大值,c
a
为后续轮之前所有轮回归期望系数的平均值,b
a
为后续轮之前所有轮聚合系数的平均值。
技术总结
本发明公开了一种基于无源RFID的垃圾袋信息收集方法,在每个垃圾桶内安装一个RFID标签阅读器,每个垃圾袋贴一个RFID标签,由读卡器发出读卡请求,接收垃圾袋RFID标签响应,通过分析多次读写请求的结果得到各个不同RFID标签页读取次数的数理统计特征值(概率分布、连续读取次数、读取间隔数等),在此基础上反推RFID标签页总数,由此确定退出信息收集的临界值,以最大程度保证所有垃圾袋的RFID标签信息都被完整收集。本发明方法成本低,准确度高,实现方法简单,具有良好的实用性和普适性。具有良好的实用性和普适性。具有良好的实用性和普适性。
技术研发人员:林翔宇 张华熊
受保护的技术使用者:浙江理工大学
技术研发日:2022.06.15
技术公布日:2022/9/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。