技术特征:
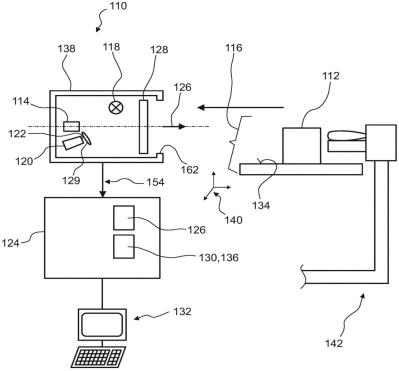
1.一种用于对象识别的检测器(110),包括-至少一个照射源(114),其被配置用于将包括多个照射特征的至少一个照射图案投影到包括至少一个对象(110)的至少一个区域(116)上;-具有至少一个光敏区域(122)的光学传感器(120),其中,所述光学传感器(120)被配置用于确定包括所述区域的至少一个二维图像的至少一个第一图像,其中,所述光学传感器(120)被配置用于确定包括多个反射特征的至少一个第二图像,所述多个反射特征包括由所述区域(116)响应于所述照射特征的照射而生成;-至少一个评估装置(124),其中,所述评估装置(124)被配置用于评估所述第一图像和所述第二图像,其中,所述反射特征中的每个反射特征包括至少一个束轮廓,其中,所述评估装置(124)被配置用于通过反射特征的束轮廓的分析来确定所述反射特征中的每个反射特征的束轮廓信息,其中,所述束轮廓信息是关于所述光学传感器(120)的所述光敏区域(122)上的光斑的强度分布的信息,其中,所述评估装置(124)被配置用于使用所确定的束轮廓信息来确定至少一个三维图像,其中,所述第一图像的所述评估包括识别至少一个预定义或预定的几何特征,其中,所述评估装置(124)被配置用于识别位于所述几何特征的图像区域内侧的所述反射特征和/或用于识别位于所述几何特征的所述图像区域外侧的所述反射特征,其中,所述评估装置(124)被配置用于从位于所述几何特征的所述图像区域内侧和/或外侧的所述反射特征的所述束轮廓信息确定至少一个深度水平,其中,所述评估装置(124)被配置用于从位于所述几何特征的所述图像区域内侧和/或外侧的所述反射特征的所述束轮廓信息确定所述对象的至少一种材料特性,其中,所述评估装置(124)被配置用于通过考虑所述深度水平和/或所述材料特性以及关于所述对象的形状和/或大小的预定或预定义的信息来确定所述对象的至少一个位置和/或取向。2.根据前述权利要求所述的检测器(110),其中,所述第一图像和所述第二图像在不同时间点被确定。3.根据前述权利要求中任一项所述的检测器(110),其中,所述几何特征是选自由以下各项组成的组的所述对象(112)的至少一个特性元素:形状、至少一个边缘的相对位置、至少一个钻孔、至少一个反射点、至少一条线、至少一个表面、至少一个圆、至少一个圆盘、整个对象(112)、所述对象(112)的一部分。4.根据前述权利要求中任一项所述的检测器(110),其中,所述评估装置(124)包括至少一个数据存储装置(130),其中,所述数据存储装置(130)包括几何特征和/或关于所述对象(112)的形状和/或大小的预定或预定义的信息的至少一个表和/或至少一个查找表。5.根据前述权利要求中任一项所述的检测器(110),其中,所述检测器(110)包括至少一个第一滤波器元件(128),其中,所述第一滤波器元件(128)被配置用于透射红外光谱范围中的光和用于至少部分地阻挡其他光谱范围的光。6.根据前述权利要求中任一项所述的检测器(110),其中,所述照射图案包括具有低点密度的至少一个周期性点图案,其中,所述照射图案每个视野具有≤2500个点。7.根据前述权利要求中任一项所述的检测器(110),其中,所述检测器(110)包括至少一个控制单元(126),其中,所述控制单元(126)被配置用于控制所述光学传感器(120)和/
或所述照射源(114),其中,所述控制单元(126)被配置用于触发所述照射图案的投影和/或所述第二图像的成像。8.根据前述权利要求所述的检测器(110),其中,所述控制单元被配置用于调整投影所述照射图案的曝光时间。9.根据前述权利要求中任一项所述的检测器(110),其中,所述评估装置(124)被配置用于通过使用光子深度比技术来确定所述反射特征中的每个反射特征的所述束轮廓信息。10.根据前述权利要求中任一项所述的检测器(110),其中,所述光学传感器(120)包括至少一个cmos传感器。11.一种用于对象识别的方法,其中,使用根据前述权利要求所述的至少一个检测器(110),其中,所述方法包括以下步骤:a)将包括多个照射特征的至少一个照射图案投影到包括至少一个对象(112)的至少一个区域(116)上;b)使用光学传感器(116)确定包括所述区域(116)的至少一个二维图像的至少一个第一图像,其中,所述光学传感器(120)具有至少一个光敏区域(122);c)通过使用所述光学传感器(120)确定包括多个反射特征的至少一个第二图像,所述多个反射特征包括由所述区域(116)响应于所述照射特征的照射生成的多个反射特征;d)通过使用至少一个评估装置(124)评估所述第一图像,其中,所述第一图像的所述评估包括识别至少一个预定义或预定的几何特征;e)通过使用所述评估装置(124)评估所述第二图像,其中,所述反射特征中的每个反射特征包括至少一个束轮廓,其中,所述第二图像的所述评估包括通过反射特征的束轮廓的分析来确定所述反射特征中的每个反射特征的束轮廓信息,以及使用所确定的束轮廓信息来确定至少一个三维图像;f)通过使用所述评估装置(124)识别位于所述几何特征内侧的所述反射特征和/或用于识别位于所述几何特征外侧的所述反射特征;g)通过使用所述评估装置(124)从位于所述几何特征内侧和/或外侧的所述反射特征的所述束轮廓信息确定至少一个深度水平;h)通过使用所述评估装置(124)从位于所述几何特征的所述图像区域内侧和/或外侧的所述反射特征的所述束轮廓信息确定所述对象(112)的至少一种材料特性;i)通过使用所述评估装置(124)通过考虑所述深度水平和/或所述材料特性以及关于所述对象(112)的形状和/或大小的预定或预定义的信息来确定所述对象(112)的至少一个位置和/或取向。12.根据涉及检测器的前述权利要求中任一项所述的检测器(110)的用途,为了使用的目的,所述用途选自由以下组成的组:交通技术中的位置测量;娱乐应用;安保应用;监视应用;安全应用;人机界面应用;跟踪应用;摄影应用;成像应用或相机应用;用于生成至少一个空间的地图的地图绘制应用;车辆的归位或跟踪信标检测器;户外应用;移动应用;通信应用;机器视觉应用;机器人应用;质量控制应用;制造应用。
技术总结
一种用于对象识别的检测器(110),包括:-至少一个照射源(114),其被配置用于将包括多个照射特征的至少一个照射图案投影到包括至少一个对象(110)的至少一个区域(116)上;-具有至少一个光敏区域(122)的光学传感器(120),其中,光学传感器(120)被配置用于确定包括该区域的至少一个二维图像的至少一个第一图像,其中,光学传感器(120)被配置用于确定包括多个反射特征的至少一个第二图像,该多个反射特征由区域(116)响应于照射特征的照射而生成;-至少一个评估装置(124),其中,评估装置(124)被配置用于评估第一图像和第二图像,其中,反射特征中的每个反射特征包括至少一个束轮廓,其中,评估装置(124)被配置用于通过反射特征的束轮廓的分析来确定反射特征中的每个反射特征的束轮廓信息,其中,评估装置(124)被配置用于使用所确定的束轮廓信息来确定至少一个三维图像,其中,第一图像的评估包括识别至少一个预定义或预定的几何特征,其中,评估装置(124)被配置用于识别位于几何特征的图像区域内侧的反射特征和/或用于识别位于几何特征的图像区域外侧的反射特征,其中,评估装置(124)被配置用于从位于几何特征的图像区域内侧和/或外侧的反射特征的束轮廓信息确定至少一个深度水平,其中,评估装置(124)被配置用于从位于几何特征的图像区域内侧和/或外侧的反射特征的束轮廓信息确定对象的至少一种材料特性,其中,评估装置(124)被配置用于通过考虑深度水平和/或材料特性以及关于对象的形状和/或大小的预定或预定义的信息来确定对象的至少一个位置和/或取向。一个位置和/或取向。一个位置和/或取向。
技术研发人员:B
受保护的技术使用者:特里纳米克斯股份有限公司
技术研发日:2021.01.29
技术公布日:2022/9/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。