1.本技术涉及飞行控制技术领域,特别涉及一种无人机末端自主防御仿真验证平台。
背景技术:
2.无人机的末端自主防御系统需要根据本机信息、态势信息与告警信息,自主实时制定防御策略,给出无人机的机动规避和干扰投射策略,直接关系到无人机在威胁环境中的生存力。
3.目前国内尚无在某型飞机平台上综合应用机动与诱饵投放的自主防御系统。
技术实现要素:
4.本技术的目的是提供了一种无人机末端自主防御仿真验证平台,以解决或减轻背景技术中的至少一个问题。
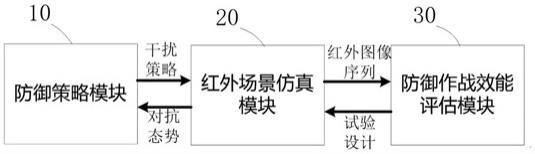
5.本技术的技术方案是:一种无人机末端自主防御仿真验证平台,所述平台包括:防御策略模块,所述防御策略模块实时获取红外场景仿真模块传输的载机告警信息、敌我态势信息、本机飞行状态信息并根据设定的防御策略规则库生成无人机的防御策略,并将所述防御策略传输至红外场景仿真模块;红外场景仿真模块,所述红外场景仿真模块用于构建无人机末端防御评估的对抗环境,所述对抗环境包括无人机目标、人工干扰、背景干扰以及相互作用耦合关系而实现红外对抗场景环境的仿真,同时所述红外场景仿真模块将红外对抗场景以及防御策略输出至防御作战效能评估模块,用于防御作战效能评估;防御作战效能评估模块,所述防御作战效能评估模块基于近距空战样本库、导弹弹道复杂度模型并利用红外场景仿真模块输出的红外对抗场景以及防御策略给出该作战条件下的防御策略产生的导弹弹道复杂度及脱靶量,进而开展防御作战效能的评估。
6.进一步的,所述防御策略规则库包含目标机动策略库和干扰投放策略库,所述防御策略规则库以对抗态势为输入,目标机动策略和干扰投放策略为输出。
7.进一步的,所述对抗态势包括载机高度、速度、弹目距离、方位角、离轴角以及无人机高度和速度。
8.进一步的,所述目标机动策略包含无机动、水平面内横滚左机动、水平面内横滚右机动、跃升机动、俯冲机动。
9.进一步的,所述干扰投放策略包括干扰弹的组间隔、弹间隔、弹数以及弹间隔参数。
10.进一步的,所述红外场景仿真模块构建的无人机、人工干扰、背景干扰以及相互作用耦合关系通过数值理论模型与测试统计模型相结合的方式建立目标的有限元数值模型。
11.进一步的,所述红外场景仿真模块通过采用osg与gpu并行渲染方式输出红外场景渲染及图像序列,实现红外对抗场景环境的仿真。
12.进一步的,所述近距空战样本库按照实际作战为设计依据,战场因素进行条件梳理和参数量化形成。
13.进一步的,通过开展弹道复杂度计算,利用脱靶量统计量和场景量化分级,实现无人机的防御作战效能评估。
14.本技术的无人机末端自主防御仿真验证平台可实现根据本机信息、态势信息与告警信息,自主实时制定防御策略,给出无人机的机动规避和干扰投射策略,有效增强无人机在威胁环境中的生存力。
附图说明
15.为了更清楚地说明本技术提供的技术方案,下面将对附图作简单地介绍。显而易见地,下面描述的附图仅仅是本技术的一些实施例。
16.图1为本技术的无人机末端自主防御仿真验证平台组成图。
17.图2为本技术的无人机末端自主防御仿真验证平台流程图。
18.图3为本技术的红外场景仿真模块功能框图。
具体实施方式
19.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。
20.为了满足无人机末端自主防御的需求,本技术中提出了一种无人机末端自主防御仿真验证平台,该平台能够自主给出无人机对抗红外空空导弹的最优机动策略和最优干扰投放策略,进而增强无人机在威胁环境中的生存力。
21.如图1和图2所示,本技术的无人机末端自主防御仿真验证平台包括:防御策略模块10、红外场景仿真模块20和防御作战效能评估模块30。
22.防御策略模块10是由基于数字仿真的防御策略规则库构成,仿真开始后,防御策略模块10实时获取红外场景仿真模块20传输的载机告警信息、敌我态势信息、本机飞行状态信息等,触发防御条件后,基于设定的防御策略规则库和上述信息生成无人机的防御策略,并传输至红外场景仿真模块20。防御策略模块10基于仿真结果计算复杂度和脱靶量,通过效能评估验证迭代产生最终防御策略。
23.其中,防御策略规则库包含目标机动策略库和干扰投放策略库,该防御策略规则库以对抗态势为输入,目标机动策略、干扰投放策略为输出。其中,对抗态势的主要影响因素有载机高度、速度、弹目距离、方位角、离轴角以及无人机高度和速度等,目标机动策略包含有无机动、水平面内横滚左机动、水平面内横滚右机动、跃升机动、俯冲机动,干扰投放策略包括组间隔、弹间隔、弹数以及弹间隔等。
24.如图3所示,红外场景仿真模块20是仿真验证平台的基础和运行环境,构建用于无人机末端防御评估的对抗环境,包括但不限于无人机目标、人工干扰、背景干扰以及相互作用耦合关系等,以实现高拟真度的红外对抗场景环境的仿真。
25.具体的,红外场景仿真模块20主要包含三个方面功能,其一为无人机红外目标、干扰、背景、大气、导弹、告警系统的建模,其二为红外场景渲染及图像序列输出,最后为仿真总控。
26.其中,无人机红外目标、干扰、背景红外建模采用数值理论模型与测试统计模型相结合的方式,采用有限元方法建立目标的数值模型;红外场景渲染及图像序列输出采用osg gpu的并行渲染方式,提高仿真渲染的实时性和仿真逼真度;仿真总控负责完成仿真过程中初始状态参数,目标、干扰类型、气象参数、环境参数等设置,评估试验参数的配置,以及整个仿真过程的控制。
27.红外场景仿真模块20将载机告警信息、敌我态势信息、本机飞行状态信息等输出至防御策略模块10,并接收防御策略模块10依据上述信息或条件生成的防御策略,实现无人机末端自主防御对抗的仿真,同时红外场景仿真模块20将导引头视角下的红外场景序列以及干扰投放策略输出至防御作战效能评估模块30,用于防御作战效能评估。
28.红外场景仿真模块20依照防御策略控制无人机机动并投放干扰,实现无人机末端自主防御的全数字仿真。
29.防御作战效能评估模块30基于近距空战样本库、导弹弹道复杂度模型并利用红外场景仿真模块20输出的导引头视角下的二维红外图像序列以及干扰时机等信息给出该作战条件下的防御策略产生的导弹弹道复杂度及脱靶量,开展防御作战效能的评估。
30.其中,按照实际作战为设计依据,战场因素进行条件梳理和参数量化,形成近距空战样本库,确定试验样本。通过开展弹道复杂度计算,利用脱靶量统计量和场景量化分级,实现无人机的防御作战效能评估。
31.本技术的无人机末端自主防御仿真验证平台可实现根据本机信息、态势信息与告警信息,自主实时制定防御策略,给出无人机的机动规避和干扰投射策略,有效增强无人机在威胁环境中的生存力。
32.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。