1.本发明涉及畜牧行业技术领域,更具体地说,涉及一种具备自动导航功能的畜牧饲喂装置。
背景技术:
2.近年来,随着畜牧业大力发展,对用于饲喂的撒料设备的功能提出更高的使用要求,传统的撒料装备功能单一,已无法满足使用要求。
3.现有技术中,利用改造的三轮或四轮车,在车上装有料斗,需要有专门的人员驾驶车辆去撒料,撒完料后对于没有撒到位的饲料还需要人工将饲料用工具推到撒料区域内,才能使牲畜食用,另一方面,对于牲畜吃剩下的饲料,还需人工清理,浪费时间且工作人员的工作强度大,效率低。
4.鉴于现有撒料设备存在上述问题,因此需要一种新型的具有自动撒料、推料及收料功能的自动导航畜牧饲喂装置,降低人员工作强度,提高饲喂效率。
技术实现要素:
5.基于此,有必要针对现有技术中撒料设备功能单一、工作人员工作轻度大、效率低的问题,提出集成多种的功能的畜牧饲喂装置。
6.一种畜牧饲喂装置,包括移动小车、固定在移动小车上方的料斗单元、设置在移动小车一端下侧的收料单元、设置在移动小车另一端下侧的推料单元、以及控制上述各单元的任务管理单元;所述料斗单元用于抛洒饲料;所述收料单元用于回收剩余饲料;所述推料单元将抛洒完成的饲料向内侧推;所述任务管理单元还用于向所述移动小车下发饲喂路线、返回路线和饲喂对象。
7.进一步地,所述移动小车上设置称重传感器,所述料斗单元固定于所述称重传感器上方,通过所述称重传感器定量料斗单元内的饲料重量;所述任务管理单元向所述称重传感器下发抛撒饲料的重量。
8.进一步地,所述料斗单元包括料斗、设置在料斗内侧底部的螺旋送料机构、以及设置在料斗外侧下部的饲料抛撒机构,所述料斗的外侧设置有螺旋电机,所述料斗的底部还设置有出料口,所述出料口位于所述饲料抛撒机构的正上方;所述螺旋电机带动所述螺旋送料机构旋转将饲料推送至出料口,从所述出料口落下的饲料通过所述饲料抛撒机构抛撒。
9.进一步地,所述饲料抛洒机构包括撒料辊筒、皮带、撒料电机,所述撒料电机的输出端与撒料辊筒连接,所述撒料电机驱动所述撒料辊筒转动,撒料辊筒转动带动皮带运动将饲料抛洒。
10.进一步地,所述收料单元包括支架、设置在支架一侧的可升降真空吸盘及设置在支架另一侧的可升降扫盘;所述支架固定于所述移动小车远离饲料抛洒机构的一侧。
11.进一步地,所述可升降真空吸盘上设置有支撑轮,所述可升降真空吸盘通过所述
支撑轮随所述移动小车的行径方向移动吸附剩余饲料。
12.进一步地,所述推料单元包括连接杆、设置在连接杆一端的升降机构、连接在升降机构下侧连接板及与连接板连接的推板;所述连接杆另一端固定在移动小车靠近饲料抛洒机构的一侧,所述升降机构控制所述推板下降并向内侧推饲料。
13.进一步地,所述连接板的上端面开设有圆孔和腰型孔,所述升降机构通过螺栓连接于所述圆孔和腰型孔,所述腰型孔用于调节推板推料的方向。
14.进一步地,所述任务管理单元还可替换为遥控器手动操作单元。
15.本发明提供的一种畜牧饲喂装置,将撒料、推料及收料集成为一体,并通过任务管理单元控制畜牧装置自动撒料、推料及收料,从而提高畜牧饲喂的自动化水平,以降低工作人员的劳动强度,提高畜牧饲喂的效率;进一步地,任务管理单元能够规划饲喂路线、返回路线,并将饲喂路线和返回路线下发至移动现车,使小车按照所规划的路径完成自动撒料、推料及收料。
附图说明
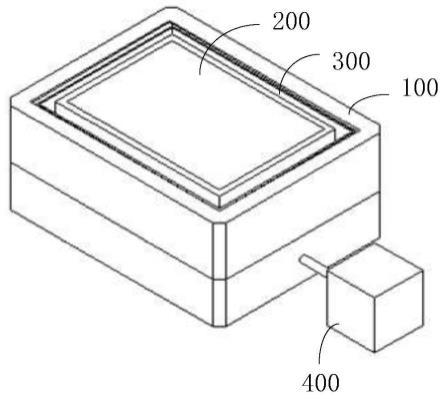
16.图1本发明一种畜牧饲喂装置整体结构示意图;
17.图2为本发明料斗单元示意图;
18.图3为本发明收料单元示意图;
19.图4为本发明推料单元示意图;
20.图5为本发明图4推料单元的部分俯视图
21.图6为本发明任务管理单元工作流程图。
22.附图标记:100、移动小车,200、料斗单元,300、收料单元,400、推料单元,500、任务管理单元,101、称重传感器,201、料斗,202、螺旋送料机构,203、饲料抛撒机构,204、螺旋电机,205、出料口,206、磁性机构,2031、撒料辊筒,2032、皮带,2033、撒料电机,2034、隔板,301、支架,302、可升降真空吸盘,303,可升降扫盘,304、支撑轮,305、负压部,3021,第一液压缸,3022、真空吸盘,3031、第二液压缸,3032、扫盘,401、连接杆,402、升降机构,403、连接板,404、推板,4021、过渡板,4031、圆孔,4032、腰型孔。
具体实施方式
23.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
24.需要说明的是,当元件被称为“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”、“顶部”、“底部”、“底端”、“顶端”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
25.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具
体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
26.下面结合具体实施例对所述畜牧饲喂装置进行说明,以进一步理解所述畜牧饲喂装置的发明构思,请参阅图1,一种畜牧饲喂装置,包括:移动小车100、固定在移动小车100上方的料斗单元200、设置在移动小车100一端下侧的收料单元300、设置在移动小车100另一端下侧的推料单元400、以及控制上述各单元的任务管理单元500;所述料斗单元200用于抛撒饲料;所述收料单元300用于回收剩余饲料;所述推料单元400将抛撒完成的饲料向内侧推;所述任务管理单元500还用于向所述移动小车100下发饲喂路线、返回路线和饲喂对象。
27.本发明提供的一种畜牧饲喂装置,将撒料、推料及收料集成为一体,并通过任务管理单元控制畜牧装置自动撒料、推料及收料,从而提高畜牧饲喂的自动化水平,以降低工作人员的劳动强度,提高畜牧饲喂的效率;进一步地,任务管理单元能够规划饲喂路线、返回路线,并将饲喂路线和返回路线下发至移动现车,使小车按照所规划的路径完成自动撒料、推料及收料。
28.在一实施例中,如图1所示,一种畜牧饲喂装置,包括:移动小车100、固定在移动小车100上方的料斗单元200、设置在移动小车100一端下侧的收料单元300、设置在移动小车100另一端下侧的推料单元400、以及控制上述各单元的任务管理单元500;其中料斗单元200用于抛撒饲料,收料单元300用于回收剩余的饲料,推料单元400将抛撒完成的饲料向内侧推,以便于饲料推至合适的位置以供牲畜食用;其中任务管理单元还用于向移动小车下发饲喂路线、返回路线和饲喂对象,使整个畜牧饲喂装置完成自动化作业,节省人力。优选地,移动小车100可以选择agv。
29.如图1所示,所述移动小车100上还设置有称重传感器101,料斗单元200固定于称重传感器101的上方,通过称重传感器101定量料斗单元200内的饲料重量,且任务管理单元500可向称重传感器下发抛撒饲料的重量,称重传感器101根据下发的重量定量料斗单元100内饲料的重量。
30.如图2所示,料斗单元200包括料斗201、设置在料斗201内侧底部的螺旋送料机构202、以及设置在料斗外侧下部的饲料抛洒机构203,其中料斗201的外侧设置有螺旋电机204,料斗201的底部还设置有出料口205,且出料口205位于饲料抛洒机构203的正上方,通过螺旋电机204带动螺旋送料机构202旋转将饲料推送至出料口205,从出料口205落下的饲料通过饲料抛洒机构203抛撒至相应位置。具体地,螺旋推料机构主由螺旋杆及安装在螺旋杆上的叶片组成,其中螺旋电机204的输出端与螺旋杆的端部连接,螺旋电机204带动螺旋杆旋转,相应的叶片旋转将饲料向前推,最终将饲料推至前方的螺旋送料机构202前方的出料口205处落下。如图2所示,饲料抛洒机构203通过一个支架连接在料斗201的侧壁,且饲料抛洒机构203位于出料口205的正下方,饲料抛洒机构203包括撒料辊筒2031、皮带2032、撒料电机2033,其中撒料电机2033的输出端与撒料辊筒2031连接,其中撒料电机2033驱动撒料辊筒2031旋转,撒料辊筒2031旋转时会带动皮带2031向前运动,从而完成撒料动作。优选地,在皮带2032上还均匀设置有间隔分布的隔板2034,通过隔板2034将粘附在一起的饲料均匀的分散开。优选地,所述出料口205处还设置有磁性机构206,通过磁性机构206将饲料内混入的金属杂质吸附出,从而防止金属杂质混入饲料中,被牲畜食用损害牲畜的健康。本
实施例中提到的所有电机设置有电安装座与料斗101固定,所所有转动部件均设置有轴承或者其他活动部件以完成转动分作。送料机构可是但不限于螺旋送料机构,也可以是链板或者皮带输送机构。
31.在一实施例中,如图3所示,收料单元300包括支架301、设置在支架301一侧的可升降真空吸盘302级设置在支架另一侧的可升降扫盘303,其中支架固定于移动小车100远离饲料抛洒机构203的一侧。具体的,支架301通过螺栓固定在移动小车100上,可升降的真空吸盘302由第一液压缸3021和连接在第一液压缸3021活动端的真空吸盘3022组成,其中第一液压缸3021的固定端固定在支架301的上端,为了使真空吸盘3022的升降更为稳定,可在真空吸盘3022上连接两个第一液压缸3021,真空吸盘3022的中间位置设置有负压部305,通过负压部305产生的负压吸取剩余的饲料,如图3所示,真空吸盘3022设置为罩壳状,并且罩壳的上部朝向负压部305聚拢,从而聚集负压,使负压吸力更强,进一步提高吸附的效率;通过第一液压缸3021控制真空吸盘3022的升降。可升降的扫盘303由第二液压缸3031和连接在第二液压缸3031活动端的扫盘3031组成,其中第二液压缸3031的固定端固定在支架301的上端,通过第二液压缸3031控制扫盘303的升降,且本实施例中第一液压缸3021和第二液压缸3031可同步升降。优选地,可升降真空吸盘302上设置有支撑轮304,所述可升降真空吸盘302通过所述支撑轮304随所述移动小车100的行径方向移动吸附剩余饲料。具体地,支撑轮304设置在真空吸盘3022的下侧,可随真空吸盘3022一同下降或上升。收料单元300工作时,第一液压缸3021控制真空吸盘3022下降至工作高度,利用真空吸附的原理对剩余饲料进行回收工作;第二液压缸3031控制扫盘3032下降至工作高度,扫盘3032上的毛刷贴近底面,扫盘3032的电机驱动扫盘3032旋转进行清扫工作,将边角位置剩余的饲料清扫至真空吸盘3022工作的区域被回收。本实施中,通过可升降真空吸盘302和可升降扫盘303共同迆,完成剩余饲料的回收以及饲料区的清扫工作。
32.在一实施例中,如图4-5所示,推料单元400包括连接杆401、设置在连接杆401一端的升降机构402、连接在升降机构下侧的连接板403及与连接板403连接的推板404,连接杆401的另一端固定在移动小车100靠近饲料抛洒机构203的一侧,升降机构402控制推板404下降并向内侧推饲料;其中连接板403的上端面开设有圆孔4031和腰型孔4032,升降机构402通过螺栓连接于圆孔4031和腰型孔4032,通过腰型孔4032调节推板404推料的方向。具体地,连接杆401的一端通过焊接或螺栓固定在移动下车的前侧壁,升降机构402的上端通过螺栓固定在连接杆401的另一端,通过升降机构402来调节推板404到撒料区的垂直距离,升降机构402的下端连接一个过渡板4021,过渡板4021与连接板403之间可相对转动从而改变推板404推料的方向,具体地,在连接板403上开设一个圆孔4031和一个腰型孔4032,将过渡板4021和连接板403通过螺栓分别穿过圆孔4031和腰型孔4032连接,在推料单元400随移动小车100向前移动时,腰型孔4032可以使得连接板404与过渡板4021发生相对转动,从而改变推板404的推料方向,使得推料的距离可调。
33.本发明的移动小车在行径撒料的过程中,饲料落下的位置无法准确控制,因此撒完料后可能出现饲料与目标区域出现偏差,导致牲畜吃不到部分饲料的情况,因此为了防止该情况的发生,本实施例提供了推料单元400,推料单元400可在撒完料后,将外围的饲料向内推,推料单元400安装在移动小车100撒料侧的尾部,由于推板404与车体之间有一定的角度,随着移动小车前移,推板404会逐步把饲料推线内侧,推板与车体的角度越大,相应的
推料距离也会越大。
34.如图6所示,任务管理单元500可以按照配方需求控制混料站进行混料,并将饲喂任务下发至移动小车。其中,饲喂任务包括撒料重量、饲喂路线、返回路线和饲喂对象等信息。任务管理单元500主要由饲料的配方设置和饲喂任务分配两部分组成,混料站根据配方进行称重和混料,并根据饲喂任务配置数据控制出料量,料斗单元200可由称重传感器101称重,任务管理单元500一方面将特定的出料量下发至称重传感器101,当称重传感器101的重量达到特定的出料量时,混料站停止向料斗单元200下料,另一方面,料斗单元200接收饲喂任务,随着移动小车的前进,将特定量的饲料抛撒至饲料区等待饲喂对象食用。
35.在另一实施例中,任务管理单元500还可替换为遥控器手动操作单元,即通过遥控器手动控制各单元工作。
36.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
37.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。