1.本发明属于故障诊断及健康管理研究技术领域,尤其涉及一种电动飞行器动力系统故障诊断及健康管理体系设计方法。
背景技术:
2.动力系统作为飞行器的“心脏”,其性能好坏直接决定了电动飞行器的推进能力,影响飞行器有效载荷、巡航时间等关键指标。受外部低温低气压影响,系统长航时飞行过程中散热困难,同时受大机动强过载复杂工况影响,系统机电非线性因素显著提高,电机瞬时温升、控制器电压过冲跌落、电流过流及螺旋桨推力效能低等问题严重影响飞行器在航过程中的安全性和可靠性。长时间过热、过效运行会严重损耗部件寿命,甚至造成系统失效,因此亟需面向飞行器动力系统构建状态监测平台,识别故障模式和风险,设计开发健康管理系统,促使电推进系统与上位机决策系统逐步融合,形成一套集智能自主状态监测、健康感知及故障分级分类处理的故障诊断及健康管理体系。
3.目前国内相关高价值飞行器大功率电推进系统故障诊断与健康管理系统尚不成熟,配套评价方法与指标体系空白较多,难以适应未来电动飞行器高效高性能和智能化发展趋势。
技术实现要素:
4.本发明的技术解决问题:克服现有技术的不足,提供一种电动飞行器动力系统故障诊断及健康管理体系设计方法,旨在实现高价值飞行器大功率电推进系统高效高可靠运行。
5.为了解决上述技术问题,本发明公开了一种电动飞行器动力系统故障诊断及健康管理体系设计方法,包括:
6.基于多层次仿真模型,建立故障知识库;
7.基于先进传感器技术和基于非线性模型的深度置信网络算法,结合故障知识库,实现系统故障诊断及健康感知预测;
8.构建系统关键指标评价体系,采用多输入单输出的健康决策生成过程,通过前期系统故障诊断及健康感知预测,采用数据统计及失效物理模型协调合作方式,建立分级分类管理策略,形成健康管理决策并执行。
9.在上述电动飞行器动力系统故障诊断及健康管理体系设计方法中,基于多层次仿真模型,建立故障知识库,包括:
10.梳理电动飞行器动力系统各单机部件、分系统到全系统工作机理,模拟真实工况,建立低-高空气压、温度模型及复杂突变来流模型,针对部件机电、磁、温度场开展有限元分析,采用电驱系统半实物或硬件在环仿真,通过注入不同类型故障信号,模拟各典型故障模式,提取故障参数,构建得到故障知识库。
11.在上述电动飞行器动力系统故障诊断及健康管理体系设计方法中,真实工况包
括:通过matlab中环境模型及往期飞试数据构建起飞、巡航、降落过程时外部大气压温度及气压模型,拟合起飞巡航过程中大气来流干扰变化,通过往期全尺寸低温低气压及吹风试验数据模拟螺旋桨真实推力与转速对应关系搭建飞行器不同倾角下动力学仿真模型。
12.在上述电动飞行器动力系统故障诊断及健康管理体系设计方法中,基于先进传感器技术和基于非线性模型的深度置信网络算法,结合故障知识库,实现系统故障诊断及健康感知预测,包括:
13.采用先进传感器技术提取含有故障分量的特征参数,利用基于非线性模型的深度置信网络算法对原始传感数据进行数据级与特征级的有效融合提取,比对故障知识库进行趋势分析,实现系统故障诊断及健康感知预测。
14.在上述电动飞行器动力系统故障诊断及健康管理体系设计方法中,采用先进传感器技术提取的信息包括:螺旋桨推拉力及力矩参数、电机及控制器温度、压强、电机电压和电流。
15.在上述电动飞行器动力系统故障诊断及健康管理体系设计方法中,系统故障诊断及健康感知预测包括两部分内容:
16.状态检测:通过多通道数据传感器采集系统电流、电压、温度,利用串口或1553b总线通讯实时传输状态数据,实现数据采集监测;
17.故障诊断:采用基于非线性模型的深度置信网络算法对原始传感数据进行数据级与特征级的有效融合提取,实现数据处理及特征挖掘,并比对故障知识库进行趋势分析,实现系统故障诊断及健康感知预测。
18.在上述电动飞行器动力系统故障诊断及健康管理体系设计方法中,状态检测与故障诊断两部分通过通讯遥测实现数据传送及故障判别。
19.在上述电动飞行器动力系统故障诊断及健康管理体系设计方法中,采用多输入单输出的健康决策生成过程,通过前期系统故障诊断及健康感知预测,采用数据统计及失效物理模型协调合作方式,建立分级分类管理策略,形成健康管理决策并执行,包括:
20.构建关键指标评价体系,通过多项关键指标系数对系统健康状态进行交叉验证,从而确定健康状态评估;通过样机功效试验构建失效物理模型,利用数据统计协调合作,实现系统健康状态分级分类管理,将故障模式细分为通讯故障、传感器故障、控制算法故障、驱动硬件故障及电机故障,将故障等级细分为一般故障及严重故障等,并针对不同的健康状态形成不同的管理决策并执行。
21.在上述电动飞行器动力系统故障诊断及健康管理体系设计方法中,还包括:依据系统故障情况进行分级处理。
22.在上述电动飞行器动力系统故障诊断及健康管理体系设计方法中,
23.系统故障模式包括通讯故障、传感器故障、控制算法故障、驱动硬件故障及电机故障;
24.故障等级包括一般故障及严重故障;其中,一般故障包括:电机、控制器短时过温,功率短时过峰、短时欠压;严重故障包括:超温,电机、控制器短路过流,断路,母线过压;
25.故障分级处理包括通讯重启、降额运行、冗余备份切换及停机处理。
26.本发明具有以下优点:
27.(1)本发明公开了一种电动飞行器动力系统故障诊断及健康管理体系设计方法,
模拟真实工况,针对系统各级开展多层次仿真试验,通过注入故障信号提取故障特征参数,构建故障知识库实现故障模式及样本全覆盖。
28.(2)本发明公开了一种电动飞行器动力系统故障诊断及健康管理体系设计方法,引入先进传感器系统对各部件关键指标进行实时监测,利用基于模型的深度置信网络算法实现数据处理及健康状态感知,借助动力系统非线性参考模型从原始信号中提取包含故障特征隐性数据,利用深度置信网络广泛的适应性和强大的映射能力,将数据中的故障特征显性提取出来,避免了冗杂的判断和数据处理步骤,保证了实时性能需求。
29.(3)本发明公开了一种电动飞行器动力系统故障诊断及健康管理体系设计方法,构建多输入单输出的健康决策生成过程,通过前期故障诊断及健康感知预测,采用数据统计及失效物理模型协调合作方式,建立分级分类管理策略,形成健康管理决策并执行,实现了高价值飞行器大功率电推进系统故障诊断与健康管理系统的设计,满足了未来电动飞行器安全性和智能化发展趋势。
附图说明
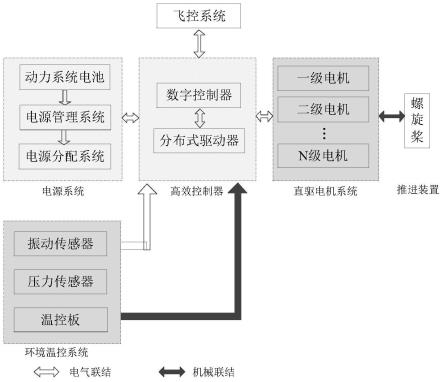
30.图1是本发明实施例中一种电动飞行器动力系统的组成示意图;
31.图2是本发明实施例中一种电动飞行器动力系统故障诊断及健康管理体系设计方法的流程示意图;
32.图3是本发明实施例中一种动力系统基于模型参考的深度置信网络的健康感知方法图。
具体实施方式
33.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明公开的实施方式作进一步详细描述。
34.如图1,电动飞行器动力系统主要由电源、高效电驱、螺旋桨及环境温控分系统组成。其中,电源部分由电池组组成,实现动力供应及设备供电;高效电驱由控制驱动器及电机组成,实现功率驱动、数据通讯、状态监测等功能;螺旋桨主要实现动力推进;环境热控主要实现系统环境监测及主动热控。本发明的核心思想之一在于建立一种电动飞行器动力系统故障诊断及健康管理体系,并给出了具体的设计方法,主要包括故障诊断及健康管理两个部分的内容。
35.如图2,在本实施例中,该电动飞行器动力系统故障诊断及健康管理体系设计方法的具体流程如下:
36.步骤101,基于多层次仿真模型,建立故障知识库。
37.在本实施例中,故障知识库的建立原理如下:依据飞行器起飞、巡航、降落不同阶段使用工况,充分考虑低温低压、长航时极限发热及机电场、磁场、热场复杂耦合问题,将系统性能需求分解为部件指标,自顶至下分解系统各级故障模式,通过建立基于系统级、部件级及成员级三级仿真模型,明确各故障特性,通过仿真及试验梳理系统故障情况,依据所属子系统及关联部件相关参数挖掘故障特征参量,建立故障判别依据,从而构建故障库。
38.具体的,可通过梳理电动飞行器动力系统各单机部件、分系统到全系统工作机理,模拟真实工况,建立低-高空气压、温度模型及复杂突变来流模型,针对部件机电、磁、温度
场开展有限元分析,采用电驱系统半实物或硬件在环仿真,通过注入不同类型故障信号,模拟各典型故障模式,提取故障参数,构建得到故障知识库。其中,真实工况包括但不仅限于:起飞、巡航、降落过程时真实恶劣工况,如突风湍流、低温、低气压等;可通过matlab中环境模型及往期飞试数据构建起飞、巡航、降落过程时外部大气压温度及气压模型,拟合起飞巡航过程中大气来流干扰变化,通过往期全尺寸低温低气压及吹风试验数据模拟螺旋桨真实推力与转速对应关系搭建飞行器不同倾角下动力学仿真模型。
39.步骤102,基于先进传感器技术和基于非线性模型的深度置信网络算法,结合故障知识库,实现系统故障诊断及健康感知预测。
40.在本实施例中,可采用先进传感器技术提取含有故障分量的特征参数,利用基于非线性模型的深度置信网络算法对原始传感数据进行数据级与特征级的有效融合提取,比对故障知识库进行趋势分析,实现系统故障诊断及健康感知预测。其中,采用先进传感器技术提取的信息包括但不仅限于:螺旋桨推拉力及力矩参数、电机及控制器温度、压强、电机电压和电流。
41.优选的,系统故障诊断及健康感知预测具体可以包括如下两部分的内容:状态检测:通过多通道数据传感器采集系统电流、电压、温度,利用串口或1553b总线通讯实时传输状态数据,实现数据采集监测;故障诊断:采用基于非线性模型的深度置信网络算法对原始传感数据进行数据级与特征级的有效融合提取,实现数据处理及特征挖掘,并比对故障知识库进行趋势分析,实现系统故障诊断及健康感知预测。其中,状态检测与故障诊断两部分通过通讯遥测实现数据传送及故障判别。
42.为了解决动力系统复杂故障模式及工作模式切换问题,一一建立故障判别准则并进行相似程度估计将花费硬件大量算力和时间等问题。在本实施例中,如图3所示,电动飞行器动力系统故障信号提取方法主要采用基于动力驱动模型的深度置信网络算法:借助动力系统非线性参考模型从原始信号中提取包含故障特征隐性数据,利用深度置信网络广泛的适应性和强大的映射能力,将数据中的故障特征显性提取出来,避免了冗杂的判断和数据处理步骤,保证了实时性能需求;利用机器学习的手段将故障特征融入神经网络中,跳过信号时域分析、频域分析、小波分析、分类比对等步骤,通过堆叠和重构过程后输出带有故障特征的信息,实现动力系统的故障自定位与隔离。
43.步骤103,构建系统关键指标评价体系,采用多输入单输出的健康决策生成过程,通过前期系统故障诊断及健康感知预测,采用数据统计及失效物理模型协调合作方式,建立分级分类管理策略,形成健康管理决策并执行。
44.在本实施例中,构建关键指标评价体系,通过多项关键指标系数对系统健康状态进行交叉验证,从而确定健康状态评估;通过样机功效试验构建失效物理模型,利用数据统计协调合作,实现系统健康状态分级分类管理,将故障模式细分为通讯故障、传感器故障、控制算法故障、驱动硬件故障及电机故障,将故障等级细分为一般故障及严重故障等,并针对不同的健康状态形成不同的管理决策并执行。
45.进一步的,还可依据系统故障情况进行分级处理。其中,系统故障模式包括但不仅限于通讯故障、传感器故障、控制算法故障、驱动硬件故障及电机故障。故障等级包括但不仅限于一般故障及严重故障;其中,一般故障包括但不仅限于:电机、控制器短时过温,功率短时过峰、短时欠压;严重故障包括但不仅限于:超温,电机、控制器短路过流,断路,母线过
压。故障分级处理包括但不仅限于通讯重启、降额运行、冗余备份切换及停机处理。
46.在上述实施例的基础上,下面以一个具体实例进行说明。
47.电动飞行器动力系统故障诊断及健康管理体系设计包含故障诊断及健康管理两个部分的设计,其中故障诊断设计内容包括:1)基于多层次仿真模型的故障知识库建立,通过模拟飞行过程中恶劣工况,针对部件-分系统开展仿真试验,通过注入不同类型故障信号,模拟不同故障模式并提取故障特征参量,构建故障知识库;2)故障信号提取及故障判别,采用先进传感器技术实时获取系统压强,螺旋桨推拉力,电机电压、电流及控制器温度等参数,并利用基于非线性模型的深度置信网络算法对原始传感数据进行故障信号提取,比对故障知识库库进行趋势分析,实现故障诊断与健康感知分析。健康管理设计包括:健康分级分类管理策略,构建系统关键指标评价体系,通过比对故障模式中多项故障参数特征,依据动力系统-分系统-部件自顶向下对故障诊断结果进行二次评判,将故障模式细分为通讯故障、指令故障、控制故障等,将故障等级细分为一般故障及严重故障等,从而形成管理决策。
48.上述内容主要通过以下具体技术方案予以实现:
49.(1)基于多层次仿真模型的故障知识库建立
50.模拟外部大气低-高空气压及温度模型,构建平流、对流层来流模型,针对突风湍流及负载非线性问题开展恶劣工况模拟仿真,将全系统机电、磁极温度场多场耦合效应分解为部件指标影响,重点开展电机、控制器磁场、温度场有限元仿真,在试验室半实物仿真平台上构建电驱分系统故障注入试验平台,通过模拟不同类型故障信号注入,记录故障样本,提取特定故障参数,实现故障特征预兆提取及判别,形成典型故障模式分析,如下表1所示:
51.[0052][0053]
表1动力系统典型故障模型分析表
[0054]
(2)故障信号提取及故障判别
[0055]
螺旋桨推拉力及转矩传感器采用llblsm-200kg-1-v5-p1-l和llbly-200kg-2-v5-p1-p,并安装于连接轴上,实时监测螺旋桨推拉力及转矩;驱动控制器中集成三相电流、母线电压、电机温度、控制驱动温度及系统压强采集电路等,经调理放大后通过1553b及串口通讯实现状态信号传输。如图3所示为基于模型参考的深度置信网络的健康感知方法,首先根据样机或仿真测试数据,建立伺服系统正常运行下的标称输入-输出模型;其次,采集实物样机的故障特征数据,对故障的形式及其基本特征做出定义,确定辨识的故障库大小,采集数据库分为训练集与测试集;再次,设定深度置信网络相关的参数,包括动量因子、学习率、模型层数和每一层的节点数、无监督预训练的最大迭代次数和有监督训练的最大迭代次数。对故障特征进行逐层分类训练,评估其故障特征提取效果,直至取得满意的分类准确度;最后,通过全连接层的有监督学习,将池化层的各个故障特征归纳成完整的健康状态信息,并形成故障判断输出。利用机器学习的手段将故障特征融入神经网络中,跳过信号时域分析、频域分析、小波分析、分类比对等步骤,节省了大量计算过程,实现动力系统的故障自定位与隔离。
[0056]
动力系统故障诊断及健康管理体系结构通常采用系统-子系统-底层资源的分层方式,各个模块与功能间耦合关系密切,故障传播影响复杂。因此,必须充分考虑不同功能模块之间的故障传播机制和失效机理,在不同层次的故障诊断模块中采用不同的推理与诊断方法,在层与层之间采用基于状态、传感器和功能的故障分析交叉增强校验,从而提高整体的故障诊断精确度,避免虚警。
[0057]
(3)健康管理分级处理策略
[0058]
往往一个故障存在多项故障参数特性异常,必须合理分析故障参数影响关系,在系统-分系统-部件层级间开展二次校验,实现故障单向定位。以电机及控制器温度、电流、电压及螺旋桨推拉力构建系统关键指标体系,比对历史数据与失效物理模型实现状态精确定位。以电机温度分级管理处理为例,设置过温及超温阈值,当电机过温达到150℃且未超过180℃,系统电机过温故障标志位置高时,再次比对故障知识库中电机过温故障模式,自
顶向下排除瞬时电流过流的一般故障及短路过流的严重故障,确定其他故障标志位未响应后,按照一般故障瞬时过温处理,短时降额运行,待恢复温度达到正常(设置为120℃)后再次切回正常运行模式;当超过180℃时达到超温阈值后,电机启动二级降额甚至缓慢停机。最终将故障模式细分为通讯故障、传感器故障、控制算法故障、驱动硬件故障及电机故障;将故障等级分为一般故障及严重故障,其中一般故障主要包括:电机、控制器短时过温,功率短时过峰、短时欠压;严重故障包括:超温,电机、控制器短路过流,断路,母线过压;将故障分级处理细分为通讯重启、降额运行、冗余备份切换及停机处理。
[0059]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
[0060]
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。