1.本公开涉及一种控制系统、控制方法以及计算机可读存储介质。
背景技术:
2.日本未审查专利申请公开no.2019-108219(jp2019-108219a)公开了一种在公寓中使用无人运送车(运送机器人)运送物体的运送系统。此处,在无人运送车中存储允许通过公寓的门的认证信息。当无人运送车将认证信息发送至公寓服务器后,无人运送车能够通过所述门。
技术实现要素:
3.当控制多个运送机器人(也称为移动机器人)时,需要允许移动机器人更有效地移动。例如,优选的是,执行控制使得多个移动机器人有效地通过门。
4.本公开提供一种能够适当地控制通过安全门的控制系统、控制方法以及计算机可读存储介质。
5.根据实施例,提供了一种控制安全门的开闭的控制系统,所述安全门设置在多个移动机器人自主行走的设施中,所述控制系统执行:接收用于通过所述安全门的通过预约信号;以及当接收到来自多个移动机器人的通过预约信号时,在所述安全门打开门一次的同时,允许所述多个移动机器人连续通过所述安全门。
6.在所述控制系统中,所述多个移动机器人通过所述安全门的通过顺序可以是基于预定优先级确定的。
7.在所述控制系统中,可以确定所述多个移动机器人是否按照已经接收到所述通过预约信号的顺序连续通过所述安全门。
8.在所述控制系统中,当从所述移动机器人到所述安全门的移动时间或者移动距离等于或者小于预定值时,每个移动机器人可以发送所述通过预约信号。
9.在所述控制系统中,当所述移动机器人已经移动到所述设施中的预定位置时,每个移动机器人可以发送所述通过预约信号。
10.在所述控制系统中,当所述移动机器人已经到达所述安全门时,每个移动机器人可以发送通过开始信号,以及可以执行控制使得根据所述通过开始信号打开所述安全门的所述门。
11.在所述控制系统中,每个移动机器人可以发送指示通过所述安全门已经完成的通过完成信号,当在接收到来自第一移动机器人的所述通过完成信号之前接收到来自第二移动机器人的所述通过预约信号时,所述安全门可以允许在所述门被打开一次时所述第一移动机器人和所述第二移动机器人连续通过所述门,以及当在接收到来自所述第一移动机器人的所述通过完成信号之前未接收到来自所述第二移动机器人的所述通过预约信号时,在所述第一移动机器人已经通过所述门之后,在所述第二移动机器人通过所述门之前,所述安全门可以关闭所述门。
12.根据另一实施例,提供了一种控制安全门的开闭的控制方法,所述安全门设置在多个移动机器人自主行走的设施中,所述控制方法包括:接收用于通过所述安全门的通过预约信号;以及当接收到来自多个移动机器人的通过预约信号时,在所述安全门打开门一次的同时,允许所述多个移动机器人连续通过所述安全门。
13.在所述控制方法中,所述多个移动机器人通过所述安全门的通过顺序可以是基于预定优先级确定的。
14.在所述控制方法中,可以确定所述多个移动机器人是否按照已经接收到所述通过预约信号的顺序连续通过所述安全门。
15.在所述控制方法中,当从所述移动机器人到所述安全门的移动时间或者移动距离等于或者小于预定值时,每个移动机器人可以发送所述通过预约信号。
16.在所述控制方法中,当所述移动机器人已经移动到所述设施中的预定位置时,每个移动机器人可以发送所述通过预约信号。
17.在所述控制方法中,当所述移动机器人已经到达所述安全门时,每个移动机器人可以发送通过开始信号,以及可以执行控制使得根据所述通过开始信号打开所述安全门的所述门。
18.在所述控制方法中,每个移动机器人可以发送指示通过所述安全门已经完成的通过完成信号,当在接收到来自第一移动机器人的所述通过完成信号之前接收到来自第二移动机器人的所述通过预约信号时,所述安全门可以允许在所述门被打开一次时所述第一移动机器人和所述第二移动机器人连续通过所述门,以及当在接收到来自所述第一移动机器人的所述通过完成信号之前未接收到来自所述第二移动机器人的所述通过预约信号时,在所述第一移动机器人已经通过所述门之后,在所述第二移动机器人通过所述门之前,所述安全门可以关闭所述门。
19.根据另一实施例,提供了一种计算机可读存储介质,所述存储介质存储有使计算机执行控制安全门的开闭的控制方法的程序,所述安全门设置在多个移动机器人自主行走的设施中,所述控制方法包括:接收用于通过所述安全门的通过预约信号;以及当接收到来自多个移动机器人的通过预约信号时,在所述安全门打开门一次的同时,允许所述多个移动机器人连续通过所述安全门。
20.在所述程序中,所述多个移动机器人通过所述安全门的通过顺序可以是基于预定优先级确定的。
21.在所述程序中,可以确定所述多个移动机器人是否按照已经接收到所述通过预约信号的顺序连续通过所述安全门。
22.在所述程序中,当从所述移动机器人到所述安全门的移动时间或者移动距离等于或者小于预定值时,每个移动机器人可以发送所述通过预约信号。
23.在所述程序中,当所述移动机器人已经移动到所述设施中的预定位置时,每个移动机器人可以发送所述通过预约信号。
24.在所述程序中,当所述移动机器人已经到达所述安全门时,每个移动机器人可以发送通过开始信号,以及可以执行控制使得根据所述通过开始信号打开所述安全门的所述门。
25.在所述程序中,每个移动机器人可以发送指示通过所述安全门已经完成的通过完
成信号,当在接收到来自第一移动机器人的所述通过完成信号之前接收到来自第二移动机器人的所述通过预约信号时,所述安全门可以允许在所述门被打开一次时所述第一移动机器人和所述第二移动机器人连续通过所述门,以及当在接收到来自所述第一移动机器人的所述通过完成信号之前未接收到来自所述第二移动机器人的所述通过预约信号时,在所述第一移动机器人已经通过所述门之后,在所述第二移动机器人通过所述门之前,所述安全门可以关闭所述门。
26.根据本公开,可以提供能够适当地控制通过安全门的控制系统、控制方法以及计算机可读存储介质。
附图说明
27.下面将参考附图描述本发明的示例性实施例的特征、优点以及技术及工业意义,其中相同的符号表示相同的元件,其中:
28.图1是表示使用了根据实施例的移动机器人的系统的整体配置的概念图;
29.图2是表示根据实施例的控制系统的控制框图;
30.图3是示意性地表示移动机器人的例子的图;
31.图4是表示根据实施例的操作控制例1的时序图;
32.图5是表示允许移动机器人连续通过安全门的操作的图;
33.图6是表示允许移动机器人连续通过安全门的操作的图;
34.图7是表示允许移动机器人连续通过安全门的操作的图;
35.图8是表示允许移动机器人连续通过安全门的操作的图;
36.图9是表示根据实施例的操作控制例2的时序图;
37.图10是表示操作控制例2中的操作的图;
38.图11是表示操作控制例2中的操作的图;
39.图12是表示操作控制例2中的操作的图;
40.图13是表示操作控制例2中的操作的图;
41.图14是表示操作控制例2中的操作的图;
42.图15是表示操作控制例2中的操作的图;
43.图16是表示变形例1中的操作的图;
44.图17是表示变形例1中的操作的图;
45.图18是表示变形例1中的操作的图;
46.图19是表示变形例1中的操作的图;以及
47.图20是表示变形例1中的操作的图。
具体实施方式
48.在下文中,将描述本发明的实施例,但是在所附权利要求中描述的本发明不限于以下实施例。以下实施例中描述的所有元件对于根据本发明的配置不是必需的。
49.配置概要
50.图1是表示使用了根据实施例的移动机器人20的系统1的整体配置的概念图。例如,移动机器人20可以是执行运送物体的运送作为任务的运送机器人。移动机器人20可以
自主行走以在医疗及福利设施(诸如医院、康复中心、护理设施或老人院)中运送运送物体。根据本实施例的系统也能够用于诸如购物中心等商业设施。
51.用户u1将运送物体装载到移动机器人20上并作出其运送请求。移动机器人20自主移动到设定目的地并且对运送物体进行运送。也即,移动机器人20执行物体运送任务(以下简称为任务)。在以下描述中,将运送物体装载到移动机器人上的地点称为运送源,将运送物体要运送到的地点称为运送目的地。
52.例如,假设移动机器人20在包括多个诊疗科室的综合医院内移动。移动机器人20在多个诊疗科室之间运送固件、消耗品、医疗器械等。例如,移动机器人将运送物体从某个诊疗科室的护士站运送到另一个诊疗科室的护士站。可选地,移动机器人20可以将运送物体从用于固件或医疗器械的存储仓库运送到诊疗科室的护士站。移动机器人20将在药房准备的药物运送到诊疗科室或预定使用该药物的患者。
53.运送物体的示例包括药品、消耗品(诸如绷带)、样本、检查器械、医疗器械、医院膳食以及固件(诸如文具)。医疗器械的示例包括血压计、输血泵、注射泵、脚踏泵、护士呼叫按钮、床传感器、连续低压吸引装置、心电图监视器、输液器控制器、肠内营养泵、呼吸机、袖带压力计、触摸传感器、吸气器、雾化器、脉搏血氧仪、复苏器、无菌设备以及回波光谱仪。移动机器人20可以运送膳食,诸如医院膳食以及用于检查的膳食准备。移动机器人20可以运送用过的器械、用过的餐具等。当运送目的地位于另一楼层时,移动机器人20可以使用电梯等移动。
54.系统1包括移动机器人20、主机管理设备10、网络600、通信单元610以及用户终端400。用户u1或用户u2能够使用用户终端400请求对运送物体进行运送。例如,用户终端400为平板电脑或者智能手机。用户终端400只要是能够执行无线或者有线通信的信息处理设备即可。
55.在本实施例中,移动机器人20和用户终端400经由网络600连接到主机管理设备10。移动机器人20和用户终端400经由通信单元610连接到网络600。网络600是有线或者无线局域网(lan)或广域网(wan)。主机管理设备10可以以有线或者无线方式连接到网络600。通信单元610例如是安装在每个环境中的无线lan单元。通信单元610可以是通用通信设备,诸如wifi路由器。
56.从用户u1或u2的用户终端400发送的各种信号经由网络600被临时传送到主机管理设备10,然后从主机管理设备10发送到目标移动机器人20。类似地,从移动机器人20发送的各种信号经由网络600被临时传送到主机管理设备10,然后从主机管理设备10发送到目标用户终端400。主机管理设备10是连接到各个设备以及从这些设备收集数据的服务器。主机管理设备10并不限于物理上单个设备,而是可以包括执行分布式处理的多个设备。主机管理设备10可以分布及设置在移动机器人20等边缘设备中。例如,系统1的一部分或者全部可以设置在移动机器人20中。
57.用户终端400和移动机器人20可以在不使用主机管理设备10的情况下向彼此发送以及从彼此接收信号。例如,用户终端400和移动机器人20可以通过无线通信直接向彼此发送以及从彼此接收信号。可选地,用户终端400和移动机器人20可以经由通信单元610发送和接收信号。
58.用户u1或用户u2使用用户终端400作出运送运送物体的请求。在以下描述中,假设
用户u1是位于运送源的运送请求者,用户u2是位于运送目的地(目的地)的计划接收者。位于运送目的地的用户u2可以请求运送运送物体。位于除了运送源或运送目的地之外的地点的用户可以请求运送运送物体。
59.当用户u1作出运送请求时,用户u1使用用户终端400输入运送物体的细节、运送物体的接收目的地(以下也称为运送源)、运送物体需要到达的地点(以下也称为运送目的地)、运送源的计划到达时间(运送物体的接收时间)、运送目的地的计划到达时间(运送截止时间)等。在下面的描述中,这种信息也被称为运送请求信息。用户u1能够通过操作用户终端400的触摸面板来输入运送请求信息。运送源可以是用户u1所在的地点、运送物体的存储地点等。运送目的地是用户u2或者计划使用运送物体的患者所处的地点。
60.用户终端400向主机管理设备10发送由用户u1输入的运送请求信息。主机管理设备10是管理多个移动机器人20的管理系统。主机管理设备10向移动机器人20发送用于执行运送任务的操作命令。主机管理设备10为每个运送请求确定用于执行运送任务的移动机器人20。然后,主机管理设备10向相应移动机器人20发送包括操作命令的控制信号。移动机器人20根据所述操作命令移动以从运送源到达运送目的地。
61.例如,主机管理设备10将运送任务分配给位于运送源或其附近的移动机器人20。可选地,主机管理设备10向正移动到运送源或其附近的移动机器人20分配运送任务。被分配任务的移动机器人20移动到运送源以接收运送物体。例如,运送源是请求任务的用户u1所在的地点。
62.当移动机器人20到达运送源时,用户u1或者其他工作人员将运送物体装载到移动机器人20中。装载了运送物体的移动机器人20自主移动到运送目的地。主机管理设备10向位于运送目的地的用户u2的用户终端400发送信号。因此,用户u2能够确定运送物体是否正在运送或者运送物体将在什么时间到达。当移动机器人20到达设定的运送目的地时,用户u2能够接收装载在移动机器人20中的运送物体。这样,移动机器人20执行了运送任务。
63.通过该整体配置,通过将控制系统的元件分布到移动机器人20、用户终端400以及主机管理设备10,可以将控制系统构建为一个整体。实现运送运送物体的实质性元件可以共同设置在单个设备中。主机管理设备10控制一个或者多个移动机器人20。
64.运送系统1包括安全门800。安全门800包括用于限制用户或者移动机器人20通过的门。当事先经允许的用户或者移动机器人20位于门前时,安全门800打开门。当事先经允许的用户或者移动机器人20不在门前时,安全门800关闭门。
65.例如,安全门800安装在只有经过认证的医院工作人员(用户)才能进入的房间的前面。也即,安全门800安装在一般用户也能够进入的一般可用区域(也称为非限制区)与限制进入的限制区之间。当安全级别设置为多级时,安全门800可以安装在具有不同安全级别的区域之间。在这种情况下,安全门800代表安全级别之间的边界。
66.安全门800的开闭控制是基于认证数据进行的。例如,认证数据被分配给被允许通过安全门800的用户以及移动机器人。认证数据存储在发给每个用户的安全卡中。安全卡为用户的身份证或者ic卡。可选地,可以将认证数据分配给每个用户终端400。
67.读卡器等设置在安全门800中。当使用非接触式安全卡时,通过允许用户将安全卡放在读卡器上方来打开门。当门打开后经过预定时间时,门自动关闭。用于认证的卡可以是非接触式卡或者接触式卡。可选地,安全门800可以基于使用环境相机300等的面部认证来
操作。
68.安全门800或者主机管理设备10存储对应于认证数据的注册数据。安全门800或者主机管理设备10基于认证数据以及注册数据是否匹配来执行认证过程。主机管理设备10控制安全门800,使得移动机器人20能够通过安全门800。
69.当安全门800安装在移动机器人20移动到目的地的路径中时,移动机器人20向主机管理设备10发送通过预约信号。通过预约信号可以包括认证数据。当接收到通过预约信号时,主机管理设备10允许移动机器人20通过。当移动机器人20到达安全门800时,主机管理设备10执行控制使得打开安全门800的门。然后,主机管理设备10执行控制,使得在移动机器人20通过安全门800之后关闭安全门800的门。
70.以这种方式,安全门800基于认证数据或者通过预约信号执行开闭操作。主机管理设备10控制移动机器人20以及安全门800。因此,只有经过认证的用户和经过认证的移动机器人20能够通过安全门800。特定认证数据被分配给移动机器人20以及用户中的每一个。主机管理设备10能够管理每个用户以及每个移动机器人的通过频率、通过时间等。稍后将描述由主机管理设备10执行的安全门800的控制。
71.通过安全门800的限制可以以双向方式或者单向方式执行。也即,仅当用户或者移动机器人20在安全级别增加的方向上移动时,才可以限制通过安全门800。换言之,当用户或者移动机器人20在安全级别降低的方向上移动时,可以不执行认证。在这种情况下,安全门800用作自动打开及关闭的自动门。
72.控制框图
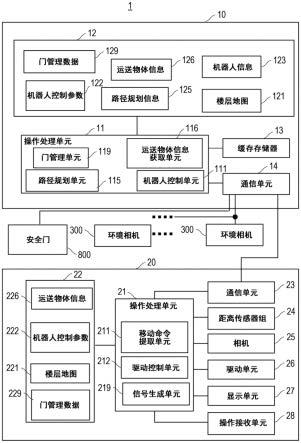
73.图2是示出系统1的控制系统的控制框图。如图2所示,系统1包括主机管理设备10、移动机器人20、环境相机300以及安全门800。
74.系统1有效地控制多个移动机器人20,同时允许移动机器人20在预定设施中自主移动。因此,在所述设施中安装了多个环境相机300。例如,环境相机300安装在所述设施内的通道、大厅、电梯、出入口、安全门800附近等。
75.环境相机300获取移动机器人20移动范围内的图像。在系统1中,由环境相机300获取的图像或者基于其的信息由主机管理设备10收集。可选地,环境相机300获取的图像等可以直接发送到移动机器人。每个环境相机300可以是设置在所述设施的通道或者入口中的监控相机等。环境相机300可以用于获取所述设施中的拥堵分布。
76.如上所述,安全门800限制用户或者移动机器人20的通过。安全门800基于从主机管理设备10发送的开闭信号打开或者关闭门。稍后将描述安全门800的控制。
77.在根据本实施例的系统1中,主机管理设备10基于运送请求信息来规划路径。主机管理设备10基于由主机管理设备10准备的路径规划信息将目的地通知每个移动机器人20。每个移动机器人20自主地移动到主机管理设备10指定的目的地。移动机器人20使用其中设置的传感器、楼层地图、位置信息等自主地移动到目的地(目标)。
78.例如,每个移动机器人20行走以使得其不接触其附近的器械、物体、墙壁、人等(下文也称为附近物体)。具体地,每个移动机器人20检测到附近物体的距离并且在其与附近物体隔开预定距离(称为阈值距离)或更多的状态下行走。当到附近物体的距离等于或者小于阈值距离时,移动机器人20减速或者停止。结果,移动机器人20能够在不与附近物体接触的情况下行走。由于能够避免接触,因此可以提供安全且有效的运送。阈值距离是预先确定的
距离,所述距离被设置为使得每个移动机器人能够安全地行走。
79.主机管理设备10包括操作处理单元11、存储单元12、缓存存储器13以及通信单元14。操作处理单元11执行用于控制及管理移动机器人20的操作。操作处理单元11能够,例如被安装为能够执行程序的设备,诸如计算机的中央处理单元(cpu)。各种功能可以由程序实现。在图2中,仅示出了作为操作处理单元11特征的机器人控制单元111、路径规划单元115、运送物体信息获取单元116以及门管理单元119,但是也可以在操作处理单元11中设置其他处理块。
80.机器人控制单元111执行用于远程控制移动机器人20的操作并且生成控制信号。机器人控制单元111基于后面将要描述的路径规划信息125等生成所述控制信号。机器人控制单元111基于从环境相机300或者移动机器人20获取的各种类型信息生成所述控制信号。所述控制信号可以包括更新信息,诸如将在后面描述的楼层地图121、机器人信息123以及机器人控制参数122。也即,当各种类型信息被更新时,机器人控制单元111生成对应于更新信息的控制信号。
81.运送物体信息获取单元116获取关于运送物体的信息。运送物体信息获取单元116获取关于正在由移动机器人20运送的运送物体的细节(类型)的信息。
82.路径规划单元115为相应的移动机器人20创建路径规划。当输入运送任务时,路径规划单元115基于运送请求信息创建用于将运送物体运送至运送目的地(目的地)的路径规划。具体地,路径规划单元115参考预先存储在存储单元12中的路径规划信息125、机器人信息123等,来确定执行新运送任务的移动机器人20。出发地点可以是移动机器人20的当前位置、上次运送任务的运送目的地、运送物体的接收源等。目的地可以是运送物体的运送目的地、等候地点(等候区)、充电地点等。
83.此处,路径规划单元115设定从移动机器人20的出发地点到目的地的通过点(transit points)。路径规划单元115为每个移动机器人20设定通过通过点的顺序。通过点被设定为例如交叉口、十字路口和电梯前的大厅或其周边。在宽度较小的通道中,移动机器人20可能难以相互通过。在这种情况下,可以将通道前面宽度较小的位置设定为通过点。通过点的候选可以预先登记在楼层地图121中。
84.路径规划单元115从多个移动机器人20中确定执行运送任务的移动机器人20,使得运送任务可以作为整个系统有效地执行。路径规划单元115优先将运送任务分配给等待的移动机器人20或者靠近运送源的移动机器人20。
85.路径规划单元115为已经分配了运送任务的移动机器人20设定包括出发地点及目的地的通过点。例如,当从运送源到运送目的地有两条或者更多条移动路径时,路径规划单元115设定通过点以使得移动机器人20能够移动更短的时间。因此,主机管理设备10基于来自相机等的图像来更新指示通道拥堵的信息。具体地,另一移动机器人20正在经过的地点或者有很多人的地点具有高拥堵度。因此,路径规划单元115设定通过点以使得避开高拥堵度的地点。
86.移动机器人20可以使用左转移动路径以及右转移动路径中的任一个能够移动到目的地。在这种情况下,路径规划单元115设定通过点,诸如移动机器人沿着具有低拥堵度的移动路径移动。通过使路径规划单元115设定一个或者多个到达目的地的通过点,移动机器人20能够沿着具有低拥堵度的移动路径移动。例如,当通道在交叉口或十字路口处分岔
时,路径规划单元115在交叉口、十字路口、转折点及其周边处适当地设定通过点。因此,可以提高运送效率。
87.路径规划单元115可以考虑电梯拥堵程度、移动距离等来设定通过点。主机管理设备10可以估计在相应移动机器人20被计划通过某地点的时刻移动机器人20的数量或者人数。路径规划单元115可以基于估计的拥堵程度来设定通过点。路径规划单元115可以根据拥堵程度的变化动态地改变通过点。路径规划单元115顺序地为已分配运送任务的移动机器人20设定通过点。通过点可以包括运送源或者运送目的地。如稍后将描述的,移动机器人20自主移动,使得移动机器人20顺序地通过由路径规划单元115设定的通过点。
88.门管理单元119管理安全门800的门的开闭。例如,主机管理设备10接收位于安全门800前面的用户或者移动机器人20的认证数据。门管理单元119基于来自用户或者移动机器人20的认证数据执行认证处理。门管理单元119确定从用户或者移动机器人20获取的认证数据是否与存储单元12中存储的注册数据匹配。当认证数据与注册数据匹配时,主机管理设备10向安全门800发送同意信号(也称为打开信号)。当从主机管理设备10接收到同意信号时,安全门800打开门。
89.当认证数据与注册数据不匹配时,主机管理设备10向安全门800发送不同意信号。当从主机管理设备10接收到不同意信号时,安全门800不打开安全门800的门。在这种情况下,安全门800可以发出警报或者重新请求认证数据。这样,门管理单元119基于认证的结果来控制安全门800的开闭。
90.门管理单元119可以生成通过许可信号。通过许可信号是用于许可通过门的信号。例如,当主机管理设备10接收到来自移动机器人20等的通过预约信号时,门管理单元119生成通过许可信号。门管理单元119根据来自移动机器人20等的信号生成用于打开或者关闭安全门800的开闭信号。由门管理单元119执行的一些或者全部过程可以由安全门800执行。也即,安全门800可以包括用于执行这些过程的处理器。
91.存储单元12是存储用于机器人管理以及控制所需的信息的存储单元。在图2所示的例子中,示出了楼层地图121、机器人信息123、机器人控制参数122、路径规划信息125、运送物体信息126以及门管理数据129,但是其他信息可以存储在存储单元12中。操作处理单元11在执行各种处理时使用存储在存储单元12中的信息来执行操作。存储单元12中存储的各种类型的信息可以用最新的信息进行更新。
92.楼层地图121是移动机器人20在其中移动的设施的地图信息。楼层地图121可以预先准备,根据从移动机器人20获取的信息生成,或者通过将根据从移动机器人20获取的信息生成的地图校正信息添加到预先准备的基本地图而生成。
93.楼层地图121包括安全门800的位置信息等。楼层地图121存储安全门800的位置坐标。当设施中存在多个安全门800时,楼层地图121包括该多个安全门800的位置信息。例如,位置坐标被添加到每个安全门800的id。楼层地图121可以包括关于限制区以及非限制区的信息。当安全级别被设定为多级时,可以将关于安全级别的信息添加到楼层地图121中。在楼层地图121中,诸如通过预约信号之类的信号被发送的发送点或者发送区域可以设定在安全门800附近。
94.在机器人信息123中,描述了由主机管理设备10管理的移动机器人20的id、型号、规格等。机器人信息123可以包括指示移动机器人20的当前位置的位置信息。机器人信息
123可以包括指示每个移动机器人20是在执行任务还是在等待的信息。机器人信息123可以包括指示每个移动机器人20是否正在运行或者出现故障的信息。机器人信息123可以包括可运送物体以及不可运送物体的信息。机器人信息123可以包括每个移动机器人20的水平尺寸的信息。
95.在机器人控制参数122中,描述了控制参数,诸如由主机管理设备10管理的每个移动机器人20与附近物体之间的阈值距离。阈值距离是用于避免与包括人在内的附近物体接触的边界距离。机器人控制参数122可以包括关于操作程度的信息,例如每个移动机器人20的移动速度的上限速度。
96.在机器人控制参数122中,可以设定多个阈值距离以及多个上限速度。主机管理设备10可以适当地改变阈值距离以及上限速度。例如,可以分级设定阈值距离以及上限速度。分级设定的阈值距离以及上限速度可以是相关的。例如,在具有较大上限速度的高速模式下,突然停止或者减速是困难的,因此阈值距离被设定得较大。在具有较小上限速度的低速模式下,突然停止或者减速是容易的,因此阈值距离被设定得较小。以这种方式,可以根据上限速度来改变阈值距离。操作处理单元11可以根据运送物体信息或者环境信息改变上限速度等。主机管理设备10根据环境或者条件从机器人控制参数中选择上限速度以及阈值距离。当上限速度以及阈值距离被更新时,主机管理设备10将更新后的数据发送到相应的移动机器人20。
97.可以根据情况来更新机器人控制参数122。机器人控制参数122可以包括指示存储单元291的容纳空间的可用性状况的信息。机器人控制参数122可以包括可运送物体以及不可运送物体的信息。在机器人控制参数122中,各种类型的信息与相应的移动机器人20相关联。
98.机器人控制参数122可以包括用于发送通过预约信号等的参数。用于发送通过预约信号等的参数的示例包括用于移动到安全门800所需的距离以及时间。例如,当移动机器人20沿着通过安全门800的路径移动以及到安全门800的移动距离等于或者小于预定距离时,移动机器人20发送通过预约信号。可选地,当到安全门800的移动时间等于或者小于预定时间时,移动机器人20发送通过预约信号等。机器人控制参数122可以包括关于预定距离或者预定时间的数据。移动时间或者移动距离的预定值(阈值)在多个移动机器人20之间可以不同,或者在多个移动机器人20之间可以是共同的。
99.路径规划信息125包括由路径规划单元115创建的规划的路径规划信息。路径规划信息125包括例如指示运送任务的信息。路径规划信息125可以包括这样的信息,诸如已分配任务的移动机器人20的id、出发地点、运送物体的详细信息、运送目的地、运送源、计划到达运送目的地的时间、计划到达运送源的时间以及到达截止时间。在路径规划信息125中,可以针对每个运送任务关联各种类型的信息。路径规划信息125可以包括从用户u1输入的运送请求信息的至少一部分。
100.路径规划信息125可以包括用于每个移动机器人20或者每个运送任务的通过点的信息。例如,路径规划信息125可以包括指示每个移动机器人20通过通过点的顺序的信息。路径规划信息125可以包括楼层地图121中的通过点的坐标或者指示相应移动机器人是否已经通过通过点的信息。
101.运送物体信息126是关于已经为其发送运送请求的运送物体的信息。例如,运送物
体信息126包括诸如运送物体的详细信息(种类)、运送源和运送目的地等信息。运送物体信息126可以包括负责所述运送的移动机器人20的id。运送物体信息126可以包括指示诸如携带、携带前(装载前)或者携带等状态的信息。在运送物体信息126中,这种信息对于每个运送物体是相关的。稍后将描述运送物体信息126。
102.路径规划单元115参考存储在存储单元12中的各种类型的信息来创建路径规划。例如,路径规划单元115基于楼层地图121、机器人信息123、机器人控制参数122以及路径规划信息125来确定执行任务的移动机器人20。路径规划单元115参考楼层地图121等来设定到运送目的地的通过点以及通过顺序。在楼层地图121中,预先登记了通过点的候选。路径规划单元115基于拥堵状况等设定通过点。当任务被连续处理等时,路径规划单元115可以将运送源以及运送目的地设定为通过点。
103.一个运送任务可以分配给两个或者多个移动机器人20。例如,当运送物体的容量大于一个移动机器人20的可运送容量时,一个运送物体被分成两部分并装载到两个移动机器人20。可选地,当运送物体具有的重量大于一个移动机器人20的可运送重量时,将一个运送物体分成两部分并装载到两个移动机器人20上。以这种方式,一个运送任务可以通过分配给两个或者多个移动机器人20来执行。当具有不同尺寸的移动机器人20被控制时,可以创建路径规划,使得能够运送运送物体的移动机器人20接收运送物体。
104.一个移动机器人20可以并行执行两个或者更多个运送任务。例如,一个移动机器人20可以同时装载两个或者更多个运送物体并且将两个或者更多个运送物体依次运送到不同的运送目的地。可选地,移动机器人20可以在运送一个运送物体的同时接收另一运送物体。不同地点装载的运送物体的运送目的地可以相同,也可以不同。结果,可以有效地执行任务。
105.在这种情况下,可以更新指示每个移动机器人20的容纳空间的可用性状况的容纳信息。也即,主机管理设备10可以管理指示可用性状况的容纳信息并控制移动机器人20。例如,当完成了装载或接收运送物体时,更新容纳信息。当输入运送任务时,主机管理设备10参考容纳信息使具有可装载运送物体的可用空间的移动机器人20移动以接收运送物体。结果,一个移动机器人20能够同时执行多个运送任务,或者两个或多个移动机器人20能够一起执行运送任务。例如,可以在每个移动机器人20的容纳空间中设置传感器并检测其可用性状况。可以预先登记每个运送物体的容量或者重量。
106.门管理数据129存储用于在用户以及移动机器人20通过安全门800时进行认证的数据或者参数。在门管理数据129中,分配给每个用户以及每个移动机器人20的认证数据被存储为注册数据。也即,用户id或者机器人id与注册数据相关联。主机管理设备10将与注册数据对应的认证数据发送给每个移动机器人20。从主机管理设备10发送的认证数据存储在每个移动机器人20中。系统的管理员能够管理注册数据或者认证数据。门管理数据129可以包括这样的数据,诸如每个用户或者每个移动机器人20通过安全门800的通过频率或者通过时间。
107.门管理数据129可以不存储认证数据。例如,可以为每个用户id或者每个机器人id分配可通过的门以及不可通过的门。门管理数据129的至少一部分可以存储在安全门800中。也即,安全门800可以包括存储门管理数据129的存储器。
108.缓存存储器13是存储在由操作处理单元11执行的处理中产生的中间信息的存储
器。通信单元14是与设置在系统1所使用的设施中的多个环境相机300以及至少一个移动机器人20通信的通信接口。通信单元14能够执行有线通信以及无线通信二者。例如,通信单元14向相应的移动机器人20发送控制每个移动机器人20所需的控制信号。通信单元14接收移动机器人20或者环境相机300收集的信息。
109.通信单元14从每个移动机器人20等接收通过预约信号、通过开始信号、通过完成信号等。通信单元14向相应的移动机器人20发送通过许可信号。通信单元14向安全门800发送开闭信号。
110.每个移动机器人20包括操作处理单元21、存储单元22、通信单元23、接近传感器(例如,距离传感器组24)、相机25、驱动单元26、显示单元27以及操作接收单元28。图2中仅示出了移动机器人20中设置的代表性处理块,但是移动机器人20包括未示出的其他处理块。
111.通信单元23是与主机管理设备10的通信单元14进行通信的通信接口。通信单元23例如使用无线电信号与通信单元14进行通信。距离传感器组24例如是接近传感器,输出指示到移动机器人20附近的物体或者人的距离的附近物体距离信息。例如,相机25捕获用于确定移动机器人20的周围状况的图像。例如,相机25可以对设置在设施天花板上的位置标记进行成像。可以使用位置标记使移动机器人20确定其位置。
112.通信单元23向主机管理设备10发送通过预约信号、通过开始信号、通过完成信号等。通信单元23从主机管理设备10接收通过许可信号。
113.驱动单元26驱动设置在移动机器人20中的驱动轮。驱动单元26可以包括检测驱动轮或者其驱动电机的旋转数的编码器等。可以基于编码器的输出来估计位置(当前位置)。移动机器人20检测当前位置并将检测到的当前位置发送到主机管理设备10。
114.显示单元27以及操作接收单元28由触摸面板显示器实现。显示单元27显示用作操作接收单元28的用户界面屏幕。指示移动机器人20的目的地或者移动机器人20的状态的信息可以显示在显示单元27上。操作接收单元28接收来自用户的操作。除了显示在显示单元27上的用户界面屏幕之外,操作接收单元28还包括设置在移动机器人20中的各种开关。
115.操作处理单元21执行用于控制移动机器人20的操作。操作处理单元21可以被安装为例如能够执行程序的设备,诸如计算机的中央处理单元(cpu)。各种功能可以通过程序实现。操作处理单元21包括移动命令提取单元211以及驱动控制单元212。在图2中,仅示出了操作处理单元21中设置的代表性处理块,但未示出的其他处理块也可以设置在操作处理单元21中。操作处理单元21可以搜索通过点之间的路径。
116.移动命令提取单元211从主机管理设备10发送的控制信号中提取移动命令。例如,移动命令包括关于下一个通过点的信息。例如,控制信号可以包括关于通过点的坐标以及通过通过点的顺序的信息。移动命令提取单元211提取这些信息作为移动命令。
117.移动命令可以包括指示移动到下一个通过点是可能的信息。在宽度较小的通道中,移动机器人20可能无法相互通过。移动机器人可能暂时无法通过通道。在这种情况下,控制信号包括用于在移动机器人必须停止的地点前面的通过点停止移动机器人20的命令。在另一移动机器人20已经通过通过点之后或者在通过通道成为可能之后,主机管理设备10向移动机器人20输出指示移动已经成为可能的控制信号。因此,暂时停止的移动机器人20重新开始其移动。
118.驱动控制单元212控制驱动单元26,使得移动机器人20基于从移动命令提取单元211给出的移动命令而移动。例如,驱动单元26包括驱动轮,驱动轮基于来自驱动控制单元212的控制命令值而旋转。移动命令提取单元211提取移动命令,使得移动机器人20移动到从主机管理设备10接收的通过点。驱动单元26旋转地驱动驱动轮。移动机器人20自主移动到下一个通过点。以此方式,移动机器人20依次通过通过点而到达运送目的地。移动机器人20可以估计其位置,以及将指示它已经通过通过点的信号发送到主机管理设备10。因此,主机管理设备10可以管理每个移动机器人20的当前位置或者运送状态。
119.信号生成单元219生成用于允许移动机器人通过安全门800的处理所需的信号。例如,信号生成单元219生成通过预约信号、通过开始信号、通过完成信号等。信号生成单元219使用移动机器人20的当前位置、楼层地图221、机器人控制参数222、门管理数据229等生成各种信号。信号生成单元219可以向生成的信号添加认证数据、机器人id等。当存在多个安全门800时,信号生成单元219可以将要通过的安全门800的门id、位置信息等添加到生成的信号中。由信号生成单元219生成的各种信号从通信单元23发送到主机管理设备10或者安全门800。
120.存储单元22存储楼层地图221、机器人控制参数222、运送物体信息226以及门管理数据229。存储在存储单元22中的信息的一部分在图2中示出,所述信息包括图2所示的楼层地图221、机器人控制参数222以及运送物体信息226以外的信息。楼层地图221是移动机器人20移动的设施的地图信息。例如,通过下载主机管理设备10的楼层地图121来获取楼层地图221。可以预先准备楼层地图221。楼层地图221可以不是整个设施的地图信息,而可以是包括移动机器人计划移动的区域的部分的地图信息。
121.安全门800的位置信息设定在楼层地图221中。也即,楼层地图221包括关于安全门800的信息。楼层地图221可以包括关于发送通过预约信号的发送点或者发送区域的信息。
122.机器人控制参数222包括用于操作移动机器人20的参数。机器人控制参数222包括例如距附近物体的阈值距离。机器人控制参数222还包括移动机器人20的上限速度。当移动机器人20从主机管理设备10接收到更新的机器人控制参数122时,更新机器人控制参数222的数据。
123.机器人控制参数122可以包括用于发送通过预约信号等的参数。如上所述,用于发送通过预约信号等的参数包括到安全门800的移动距离或者移动时间。也即,作为机器人控制参数122,可以设定到安全门800的移动距离或者移动时间的阈值。
124.门管理数据229包括用于在安全门800中进行认证的认证数据。认证数据是每个移动机器人20特有的数据。如上所述,与从主机管理设备10发送的注册数据对应的数据是门管理数据229。在通过安全门800时,移动机器人20向主机管理设备10或者安全门800发送包括认证数据的通过预约信号。门管理单元119通过将来自移动机器人20的认证数据与登记在门管理数据129中的注册数据比较来执行认证处理。
125.在移动机器人移动时,可以执行控制以使得阈值距离根据移动速度逐步改变。例如,当移动机器人20加速并达到高速时,阈值距离增加。也即,当移动机器人20的速度高于速度阈值时,阈值距离增加。当移动机器人20高速移动时,制动距离增加,因此优选增加阈值距离,即边界距离。因此,当移动机器人20在速度低于速度阈值的低速模式下移动时,以及当移动机器人20在速度等于或者高于速度阈值的高速模式下移动时,阈值距离可以改
变。阈值距离可以分为三个或者更多个级别。例如,可以将移动模式设定为三个级别,即高速模式、中速模式以及低速模式,可以为移动模式设定不同的阈值距离。随着速度变高,阈值距离变大。也即,最低速度模式下的阈值距离是最小的。
126.运送物体信息226包括与运送物体信息126类似的关于运送物体的信息。运送物体信息226包括诸如运送物体的细节(类型)、运送源以及运送目的地等的信息。运送物体信息226可以包括指示诸如携带、携带前(装载前)或者携带等状态的信息。在运送物体信息226中,这种信息对于每个运送物体是相关的。稍后将描述运送物体信息226。运送物体信息226只要包括由移动机器人20运送的运送物体的信息即可。因此,运送物体信息226是运送物体信息126的一部分。也即,运送物体信息226可以不包括由另一移动机器人20运送的运送物体的信息。
127.当从距离传感器组24获取的距离信息所指示的距离小于参考机器人控制参数222的阈值距离时,驱动控制单元212停止其操作或者使移动机器人减速。驱动控制单元212控制驱动单元26使得移动机器人以等于或者低于上限速度的速度行走。驱动控制单元212限制驱动轮的转速,使得移动机器人20不以等于或者高于上限速度的速度移动。
128.移动机器人20的配置
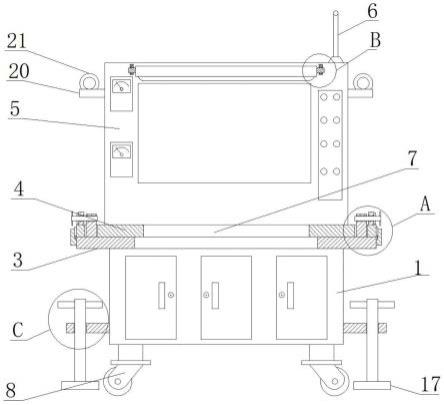
129.下面将描述移动机器人20的外观。图3是示意性地示出移动机器人20的图。图3示出的移动机器人20是移动机器人20的示例,可以具有另一种形状。在图3中,x方向定义了移动机器人20的前进方向以及后退方向,y方向定义了移动机器人20的横向,z方向定义了移动机器人20的高度方向。
130.移动机器人20包括主体单元290以及转向架单元260。主体单元290安装在转向架单元260上。主体单元290以及转向架单元260均具有长方体形状的壳体,其组成部分安装在壳体中。例如,驱动单元26容纳在转向架单元260中。
131.用作容纳空间的存储单元291以及密封存储单元291的门292设置在主体单元290中。多层架子设置在存储单元291中并且针对每层架子管理其可用性。例如,通过在每层设置各种传感器,例如重量传感器,可以更新可用性。移动机器人20通过自主移动将容纳在存储单元291中的运送物体运送到从主机管理设备10指示的目的地。主体单元290可以具有未在其壳体中示出的控制箱。门292能够用电子钥匙等锁定。当移动机器人20到达运送目的地时,用户u2用电子钥匙打开门292。可选地,当移动机器人20到达运送目的地时,门292可以自动解锁。
132.如图3所示,纵向距离传感器241以及横向距离传感器242作为距离传感器组24设置在移动机器人20的外表面上。移动机器人20使用纵向距离传感器241测量在移动机器人20的纵向上与附近物体的距离。移动机器人20使用横向距离传感器242测量在移动机器人20的横向上与附近物体的距离。
133.例如,纵向距离传感器241设置在主体单元290的壳体的前表面以及后表面上。横向距离传感器242设置在主体单元290的壳体的右侧表面以及左侧表面上。纵向距离传感器241以及横向距离传感器242例如是超声波距离传感器或者激光测距仪。纵向距离传感器241以及横向距离传感器242检测与附近物体的距离。当纵向距离传感器241或者横向距离传感器242检测到的与附近物体的距离等于或者小于阈值距离时,移动机器人20减速或者停止。
134.驱动轮261以及脚轮262设置在驱动单元26中。驱动轮261是用于使移动机器人20纵向以及横向移动的轮子。脚轮262是未施加驱动力且随驱动轮261滚动的从动轮。驱动单元26包括未示出的驱动电机并驱动驱动轮261。
135.例如,驱动单元26支撑壳体中的与地板表面接触的两个驱动轮261以及两个脚轮262。两个驱动轮261布置成使得其旋转轴彼此匹配。驱动轮261由未图示的电机独立旋转驱动。驱动轮261根据来自图2所示的驱动控制单元212的控制命令值而旋转。脚轮262为从动轮,其中从驱动单元26沿竖直方向延伸的转动轴与从动轮的旋转轴分开并且轴向支撑所述从动轮,并且其在驱动单元26的移动方向上跟随所述驱动轮。
136.例如,移动机器人20在两个驱动轮261以相同的转速向同一方向旋转时直线移动,当两个驱动轮261以相同的转速沿相反方向旋转时,移动机器人20绕几乎穿过两个驱动轮261的中心的垂直轴转弯。通过使两个驱动轮261以不同转速沿相同方向旋转,移动机器人20能够在左右转向的同时行走。例如,通过将左驱动轮261的转速设定为高于右驱动轮261的转速,移动机器人20能够向右转向。另一方面,通过将右驱动轮261的转速设定为高于左驱动轮261的转速,移动机器人20能够向左转向。也即,通过控制两个驱动轮261的旋转方向以及转速,移动机器人20能够执行任意方向的平移、转弯、向左或向右转向等。
137.在移动机器人20中,显示单元27以及操作界面281设置在主体单元290的上表面上。操作界面281显示在显示单元27上。当用户触摸显示单元27上显示的操作界面281时,操作接收单元28能够接收来自用户的命令输入。显示单元27上方设置有紧急停止按钮282。紧急停止按钮282以及操作界面281作为操作接收单元28。
138.显示单元27例如是液晶显示器,并且将人物的面部作为图示进行显示或者将关于移动机器人20的信息呈现为文本或者图标。当人物的面部被显示在显示单元27上时,显示单元27以伪面部给附近的观察者留下印象。安装在移动机器人20中的显示单元27等也可以用作用户终端400。
139.相机25设置在主体单元290的前表面上。此处,两个相机25用作立体相机。也即,具有相同视角的两个相机25在水平方向上分开布置。每个相机25输出由其捕获的图像作为图像数据。能够基于来自两个相机25的图像数据计算到对象的距离或者对象的大小。操作处理单元21通过分析来自相机25的图像能够检测在移动方向前方的人、障碍物等。当在行走方向前方存在人、障碍物等时,移动机器人20在避开其的同时沿着路径移动。来自相机25的图像数据被发送到主机管理设备10。
140.移动机器人20通过分析从相机25输出的图像数据或者从纵向距离传感器241以及横向距离传感器242输出的检测信号,来认识附近物体或者识别其位置。相机25捕捉移动机器人20的行走方向前方的图像。移动机器人20将设置有照相机25的一侧设定为其前侧,如图所示。也即,移动机器人20的前侧是其正常移动时箭头所示的行走侧。
141.安全门800的开闭操作
142.开闭操作示例1
143.下面将描述允许移动机器人20通过安全门800的控制操作。图4是示出移动机器人20、主机管理设备10以及安全门800之间的信号发送以及接收的时序图。图5至图8是示意性地示出允许移动机器人20通过安全门800的控制操作的图。图5至图8是示意性示出安全门800周围的俯视图。
144.在图5至图8中,两个移动机器人20被示为移动机器人20a和20b。在以下描述中,假设移动机器人20a以及移动机器人20b连续通过安全门800。如图5等所示,移动机器人20a以及移动机器人20b沿着共同路径r在相同方向上移动。例如,移动机器人20b按照通过点m1、m2以及m3的顺序沿着路径r移动。移动机器人20a在移动机器人20b前面行走。移动机器人20a按照通过点m2以及m3的顺序沿着路径r移动。
145.安全门800安装在通过点m2以及通过点m3之间。在安全门800之前定义了非限制区a1,在安全门800之后定义了限制区a2。安全门800安装在连接非限制区a1以及限制区a2的通道中。对通过安全门800的用户或者移动机器人20成像的环境相机300布置在安全门800附近。
146.安全门800包括门801以及主体单元802。主体单元802包括打开以及关闭门801的电机或者机构。用户放卡的读卡器可以设置在主体单元802中。主体单元802可以包括控制门801的开闭的处理器或者控制电路。
147.首先,在图5所示的阶段中,移动机器人20a向主机管理设备10发送通过预约信号(s401)。例如,当移动机器人20a的当前位置到安全门800的移动距离等于或者小于预定距离时,移动机器人20a的信号生成单元219生成通过预约信号。通信单元23向主机管理设备10发送通过预约信号。因此,移动机器人20a能够预约通过安全门800。通过预约信号可以包括移动机器人20a的机器人id、计划通过时间、运送物体信息或者认证数据。当从移动机器人20a接收到通过预约信号时,主机管理设备10向移动机器人20a发送通过许可信号(s402)。
148.移动机器人20a以及移动机器人20b移动到安全门800。当移动机器人20a到达安全门800时,移动机器人20a向主机管理设备10发送通过开始信号(s403)。当接收到通过开始信号时,主机管理设备10向安全门800发送打开信号(s404)。因此,如图6所示,安全门800打开门801(s405)。
149.当移动机器人20a和20b进一步移动时,移动机器人20b向主机管理设备10发送通过预约信号(s406)。当移动机器人20b的当前位置到安全门800的移动距离等于或者小于预定距离时,移动机器人20b的信号生成单元219生成通过预约信号。然后,通信单元23向主机管理设备10发送通过预约信号。因此,移动机器人20b能够预约通过安全门800。当从移动机器人20b接收到通过预约信号时,主机管理设备10向移动机器人20b发送通过许可信号(s407)。
150.然后,当移动机器人20a如图7所示通过安全门800时,移动机器人20a向主机管理设备10发送通过完成信号(s408)。此时,由于接收到来自移动机器人20b的通过预约信号,主机管理设备10不生成关闭信号。因此,安全门800的门保持打开。
151.然后,当移动机器人20b到达安全门800时,移动机器人20b向主机管理设备10发送通过开始信号(s409)。当移动机器人20a和20b进一步移动时,移动机器人20b通过安全门800。当移动机器人20b通过安全门800时,移动机器人20b向主机管理设备10发送通过完成信号(s410)。当主机管理设备10从移动机器人20b接收到通过完成信号时,主机管理设备10向安全门800发送关闭信号(s411)。因此,如图8所示,安全门800关闭门801(s412)。
152.以这种方式,主机管理设备10在从所有已发送通过预约信号的移动机器人20a和20b接收到通过完成信号之后,发送用于安全门800的关闭信号。因此,在预约通过的两个移
动机器人20a和20b的通过完成之前,门801不关闭。在移动机器人20a和20b正通过安全门800时,安全门800不关闭门801。因此,移动机器人20b等待打开以及关闭门的等待时间被节省。由于移动机器人20b能够快速通过安全门800,所以能够提高运送效率。
153.当主机管理设备10接收到来自多个移动机器人的通过预约信号时,可以在门801被打开一次的同时使多个移动机器人20连续地通过门801。因此,两个或者更多个移动机器人20能够连续地通过安全门800。能够提高运送效率。能够减少移动机器人20的等待时间。连续通过安全门800的移动机器人20的数量可以是三个或者更多。
154.在以上描述中,移动机器人20a和20b在到安全门800的移动距离达到预定距离的时刻发送通过预约信号。可选地,移动机器人20a和20b可以在到安全门800的移动时间达到预定时间的时刻发送通过预约信号。例如,每个移动机器人20可以基于到安全门800的移动距离及其移动速度来估计移动时间。在估计的移动时间变得等于或者小于预定阈值的时刻,移动机器人20可以发送通过预约信号。主机管理设备10可以根据设施中的拥堵程度或者状况来改变移动距离或者移动时间的阈值。
155.移动机器人20b发送通过预约信号的位置或者时刻可以与移动机器人20a发送通过预约信号的位置或者时刻相同或者不同。例如,发送位置可以根据移动机器人20a和20b的类型、运送物体或者移动速度而改变。例如,对于具有高移动速度的移动机器人20,移动距离或者移动时间的阈值可以设定得更大。可以在移动机器人20的机器人控制参数中设定用于移动距离或者移动时间的多个阈值。阈值可以分级设定,以及主机管理设备10可以基于设施中的拥堵程度或者移动速度而改变所述阈值。
156.可以预先在楼层地图121中关联发送通过预约信号的发送点或者发送区。例如,当在安全门800附近提供移动机器人20的等候区时,等候区可被设定为发送区。当移动机器人20进入发送区时,移动机器人20可以发送通过预约信号。
157.移动机器人20a和20b中的每个的信号生成单元219能够在适当的时刻生成通过预约信号、通过开始信号以及通过完成信号。例如,当移动机器人20a和20b中的每个检测到其当前位置时,能够基于当前位置生成通过预约信号、通过开始信号以及通过完成信号。在当前位置到达楼层地图221上的预定发送点或者预定发送区的时间点,移动机器人20a和20b能够向主机管理设备10发送各种信号。
158.发送所述通过开始信号或者通过完成信号的位置或者时刻能够基于移动机器人20相对于安全门800的位置或者到安全门800的距离来确定。例如,距离传感器组24可以检测到安全门800的距离,当检测到的距离达到预定值时移动机器人20可以发送信号。可选地,可以在移动机器人20中设置诸如射频识别器(rfid)标签或者近场通信(nfc)标签等的无线电标签。移动机器人20可以在标签能够被设置在安全门800中或其附近的标签读取器读取的时刻,发送通过开始信号。
159.通过预约信号、通过开始信号以及通过完成信号中的至少一个可以由移动机器人20以外的设备产生。移动机器人20可以发送指示其当前位置的信息给主机管理设备10,主机管理设备10可以基于该当前位置生成各种信号。
160.可选地,安全门800或者环境相机300可以生成通过预约信号、通过开始信号以及通过完成信号。可以基于从安全门800或者环境相机300获取的信息来检测移动机器人20的当前位置。可以从环境相机300捕获的图像中检测移动机器人的当前位置。可选地,无线电
标签可以设置在移动机器人20中,无线电标签阅读器可以附接到安全门800或其附近。当无线电标签阅读器从无线电标签接收到无线电波时,可以检测到当前位置。可以结合这些方法来检测当前位置。
161.安全门800或者主机管理设备10可以确定移动机器人20是否已经按照通过预约信号已经被接收到的顺序通过安全门800。也即,主机管理设备10可以确定接收通过预约信号的顺序与通过顺序是否相互匹配。例如,假设移动机器人20b在移动机器人20a已经发送通过预约信号之后发送通过预约信号。在这种情况下,在移动机器人20a已经通过安全门800之后,确定移动机器人20b是否已经通过安全门800。
162.当通过顺序以及信号发送顺序彼此匹配时,确定出移动机器人20的操作被适当地控制。当通过顺序与信号发送顺序不匹配时,确定出移动机器人20的操作没有被适当地控制。例如,可以认为在移动机器人20a中发生了错误。因此,由于可以快速解决错误,所以能够提高运送效率。
163.开闭操作示例2
164.下面将参照图9至图15描述开闭操作示例2。在开闭操作示例2中,安全门800在移动机器人20a的通过时刻以及移动机器人20b的通过时刻之间关闭。图9是示出各种设备之间的信号发送以及接收的时序图。图10至图15是示意性地示出允许移动机器人20通过安全门800的控制操作的图。具体地,图10至图15是示意性示出安全门800周围的俯视图。
165.在图10至图15中,两个移动机器人20a和20b通过安全门800。在开闭操作示例2中,与图5等所示的开闭操作示例1相比,移动机器人20b与移动机器人20a分离得更远。在移动机器人20a已经通过安全门800之后移动机器人20b移动到安全门800之前,安全门800关闭门801。开闭操作示例2中的其他配置与开闭操作示例1相同,因此将适当地省略其描述。
166.首先,在图10所示的阶段中,移动机器人20a向主机管理设备10发送通过预约信号(s901)。例如,当移动机器人20a的当前位置到安全门800的移动距离等于或者小于预定距离时,移动机器人20a的信号生成单元219生成通过预约信号。通信单元23向主机管理设备10发送通过预约信号。因此,移动机器人20a能够预约通过安全门800。通过预约信号可以包括移动机器人20a的机器人id、计划通过时间、运送物体信息或者认证数据。当从移动机器人20a接收到通过预约信号时,主机管理设备10向移动机器人20a发送通过许可信号(s902)。
167.移动机器人20a以及移动机器人20b移动到安全门800。当移动机器人20a到达安全门800时,移动机器人20a向主机管理设备10发送通过开始信号(s903))。主机管理设备10向安全门800发送打开信号(s904)。因此,如图11所示,安全门800打开门801(s905)。
168.然后,当移动机器人20a和20b进一步移动时,移动机器人20a通过安全门800。因此,移动机器人20a向主机管理设备10发送通过完成信号(s906)。此时,由于没有接收到来自移动机器人20b的通过预约信号,主机管理设备10发送用于安全门800的关闭信号(s907)。因此,如图12所示,安全门800关闭门801(s908)。
169.当移动机器人20b移动到图13所示的位置时,移动机器人20b向主机管理设备10发送通过预约信号(s909)。当移动机器人20b的当前位置到安全门800的移动距离等于或者小于预定距离时,移动机器人20b的信号生成单元219生成通过预约信号。然后,通信单元23向主机管理设备10发送通过预约信号。因此,移动机器人20b能够预约通过安全门800。当接收
到来自移动机器人20b的通过预约信号时,主机管理设备10向移动机器人20b发送通过许可信号(s910)。
170.当移动机器人20b到达安全门800时,移动机器人20b向主机管理设备10发送通过开始信号(s911)。因此,主机管理设备10向安全门800发送打开信号(s912)。因此,如图14所示,安全门800打开门801(s913)。在图14中,移动机器人20a移动到图的外部,因此未示出。
171.然后,当移动机器人20b移动时,移动机器人20b通过安全门800。当移动机器人20b通过安全门800时,移动机器人20b向主机管理设备10发送通过完成信号(s914)。当主机管理设备10从移动机器人20b接收到通过完成信号时,主机管理设备10向安全门800发送关闭信号(s915)。因此,如图15所示,安全门800关闭门801(s916)。
172.以这种方式,当两个移动机器人20a和20b分别移动时,安全门800在移动机器人20a的通过时刻以及移动机器人20b的通过时刻之间关闭门801。可以防止通过安全门800的人未经许可而通过安全门800。因此,可以提高安全性。特别地,在诸如医院等的医疗以及福利设施中,不仅工作人员或者患者移动,诸如患者及其访客等的一般用户也在移动。限制一般用户进入限制区a2。因此,可以防止一般用户错误地通过安全门800。
173.变形示例1
174.在变形示例1中,基于预定优先级确定移动机器人20a和20b的通过顺序。例如,优先级是基于运送物体信息或者路径规划确定的。下面将参考图16至图19描述变形示例1。通过预约信号、通过开始信号、以及通过完成信号的发送过程与上述相同,因此省略说明。
175.在图16至图19中,移动机器人20a以及移动机器人20b的移动方向彼此相反。具体地,移动机器人20a从限制区a2移动到非限制区a1。移动机器人20b从非限制区a1移动到限制区a2。具体地,移动机器人20a按照通过点m11、m12以及m13的顺序沿着路径ra移动。移动机器人20b按照通过点m21以及m22的顺序沿着路径rb移动。
176.在图16中,移动机器人20a比移动机器人20b移动得更靠近安全门800。也即,移动机器人20a到安全门800的距离小于移动机器人20b到安全门800的距离。在图16所示的阶段中,移动机器人20a以及移动机器人20b都已经发送了通过预约信号。
177.此处,主机管理设备10执行控制以使得移动机器人20b比移动机器人20a更早地通过安全门800。例如,当接收到两个或者更多个通过预约信号时,主机管理设备10基于运送物体信息或者路径规划确定通过顺序。用于确定通过顺序的信息可以包括在通过预约信号中。可选地,可以基于存储在存储单元12中的各种类型的信息来确定通过的优先级。
178.主机管理设备10执行使移动机器人20b提前通过的调停(mediation)。例如,主机管理设备10可以不向移动机器人20a发送通过许可信号。可选地,主机管理设备10可以在通过许可信号已被发送到移动机器人20a之后发送用于取消许可的取消信号。也即,主机管理设备10在已经确定通过顺序后,通知第一移动机器人20b以外的移动机器人20a取消通过许可。例如,门管理单元119执行用于确定通过顺序以及生成取消信号的处理。
179.当已经接收到取消信号或者当没有接收到通过许可信号时,移动机器人20a在安全门800前等待,如图17所示。此时,移动机器人20a在不妨碍另一移动机器人20b通过的位置处等待。在图17中,移动机器人20a从路径ra向左侧移位。也即,移动机器人20a在靠近主体单元802处等待。即使当移动机器人20a移动到安全门800的前面,移动机器人20a也不发送通过开始信号。
180.当移动机器人20b进一步移动并到达安全门800时,移动机器人20b发送通过开始信号。因此,如图18所示,安全门800打开门801。同时,移动机器人20a在等待位置等待并且不移动。
181.然后,当移动机器人20b通过安全门800时,移动机器人20b向主机管理设备10发送通过完成信号。当接收到来自具有高优先级的移动机器人20b的通过完成信号时,主机管理设备10发送通过许可信号至移动机器人20a。因此,如图19所示,移动机器人20a开始通过安全门800。移动机器人20a向主机管理设备10发送通过开始信号。因此,移动机器人20a返回路径ra。
182.当移动机器人20a和20b进一步移动时,移动机器人20a通过安全门800。当移动机器人20a向主机管理设备10发送通过完成信号时,安全门800关闭门801,如图20所示。在变形示例1中,主机管理设备10能够确定通过顺序。因此,能够执行适合状况的最佳运送。
183.此处,移动机器人20a和20b向主机管理设备10发送通过预约信号。在移动机器人20a以及移动机器人20b完全通过安全门800之前,两个通过预约信号由主机管理设备10接收到。因此,当安全门800打开门801一次时,移动机器人20a和20b可以连续地通过安全门800。因此,可以有效地运送物体。
184.主机管理设备10向移动机器人20发送通过许可信号或者其取消信号。因此,可以容易地改变移动机器人20的通过顺序。例如,主机管理设备10向通过顺序中优先级低的移动机器人发送取消通过许可的取消信号。在已经发送取消信号的移动机器人20通过安全门800的时刻,主机管理设备10重新发送通过许可信号。因此,可以容易地调整通过顺序。主机管理设备10可以向通过许可信号添加指示通过顺序的信息。在这种情况下,移动机器人20以其通过顺序开始通过。也即,当通过顺序中的前一个移动机器人已经完全通过安全门800时,移动机器人20开始通过。
185.在变形示例1中,三个或者更多个移动机器人20可以在门801被打开一次的同时连续地通过安全门800。也即,移动机器人20a之后的移动机器人可以在安全门800关闭门801之前通过安全门800。在这种情况下,也可以任意改变通过顺序。
186.用于确定通过的优先级的方法没有特别限制。例如,主机管理设备10可以基于运送物体信息或者计划使用时间的细节来确定优先级。可选地,主机管理设备10可以基于从安全门800到目的地或者通过点的距离来确定优先级。因此,门管理单元119能够参考运送物体信息126或者路径规划信息125来确定通过顺序。
187.主机管理设备10可以估计设施中的拥堵程度并且基于估计的结果确定优先级。主机管理设备10能够根据环境相机300、机器人相机等的图像来估计目的地附近或者移动路径中的拥堵程度。由于通过高度拥堵的区域需要时间,因此主机管理设备10提高相应移动机器人20的通过优先级。可选地,主机管理设备10可以延迟相应移动机器人20的通过优先级,使得移动机器人20在拥堵解决后移动。
188.当移动机器人20登上电梯时,主机管理设备10可以基于电梯的拥堵程度或者运行情况确定通过顺序。
189.在上述描述中,主机管理设备10控制安全门800以及多个移动机器人20,但是移动机器人20以及安全门800可以由不同的控制设备控制。例如,控制移动机器人20的设备以及控制安全门800的设备可以在物理上彼此不同。
190.主机管理设备10的至少一些功能可以由安全门800执行。并入安全门800的主体单元802中的处理器或者控制电路可以用作控制设备或者控制系统。因此,根据本实施例的控制系统可以由单个设备构成,或者可以分布并布置在多个设备中。
191.通过预约信号以及通过开始信号也可以合并为一个信号。例如,可以将关于通过开始时间的信息添加到通过预约信号。安全门800在对应于通过开始时间的时刻被打开。在这种情况下,不需要通过开始信号。
192.在上述描述中,认证数据被分配给每个移动机器人20,但是认证数据可以不分配给每个移动机器人20。也即,对于已经发送通过预约状况的移动机器人20可以跳过认证过程。可以适当地组合上述实施例的操作示例1、2以及变形示例1。
193.由主机管理设备10、安全门800、移动机器人20等执行的一些或者全部处理可以被实现为计算机程序。这样的程序可以存储在各种类型的非暂时性计算机可读介质中并且被提供给计算机。非暂时性计算机可读介质包括各种类型的有形记录介质。非暂时性计算机可读介质的示例包括磁记录介质(例如,软盘、磁性类型或者硬盘驱动器)、磁光记录介质(例如,磁光盘)、光盘只读存储器(cd-rom)、cd-r、cd-r/w以及半导体存储器(例如,掩模rom、可编程rom(prom)、可擦除prom(eprom)、闪存rom、随机存取存储器(ram))。可以使用各种类型的暂时性计算机可读介质将程序提供给计算机。暂时性计算机可读介质的示例包括电信号、光信号以及电磁波。暂时性计算机可读介质可以经由诸如电线或者光纤的有线通信线路或者无线通信线路向计算机提供程序。
194.本发明不限于上述实施例,可以在不脱离本发明的主旨的情况下进行适当修改。例如,在上述实施例中描述了运送机器人在医院自主移动的系统,但是所述系统可以将预定物体作为行李运送到旅馆、餐厅、办公楼、活动大厅或者综合设施中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。