1.本发明涉及油气勘探技术领域,特别涉及一种古地貌恢复方法和装置。
背景技术:
2.古地貌是风化、剥蚀、岩溶作用与多种地质条件综合作用的结果,不同地貌形态对储层的发育有较大的影响。因此,有必要提供一种古地貌恢复方法,以准确有效地划分储层有利相带。
3.目前,主要采用残余厚度法、印模法进行古地貌恢复。其中,残余厚度法是用侵蚀面至其下伏的水平基准面的残余厚度来反应古地貌;印模法是用侵蚀面至其上覆的水平基准面的厚度来反应古地貌。
4.但是上述两种方法均没有考虑内部层序是否发生变化以及地层剥蚀的影响,不能准确地对古地貌进行恢复。
技术实现要素:
5.本发明实施例提供了一种古地貌恢复方法和装置,能够克服上述技术问题。所述技术方案如下:
6.一方面,提供了一种古地貌恢复方法,所述古地貌恢复方法包括:
7.建立目标区域的层序地层框架,对所述层序地层框架进行精细层序划分;
8.分别利用印模厚度法和残余地层厚度法对所述目标区域的目的层进行初始古地貌恢复;
9.当所述目的层含有异常沉积体时,若所述印模厚度法对应的初始古地貌恢复趋势与所述残余地层厚度法对应的初始古地貌恢复趋势一致,则采用如下公式确定所述目的层的相对古地貌恢复值:
10.h=(h
1max-h1 h2 h
q2
)/3,
11.若不一致时,则采用如下公式获取所述目的层的相对古地貌恢复值:
12.h=(h
1max-h1 h
q1
h2 h
q2
)/4
13.式中:
14.h—所述目的层的相对古地貌恢复值,m;
15.h
1max
—所述目的层的上覆地层沉积最大厚度值,m;
16.h1—所述目的层中待恢复位置的上覆地层沉积厚度值,m;
17.h2—所述目的层的下伏地层沉积厚度,m;
18.h
q1
—目的层上覆异常沉积体的沉积厚度,m;
19.h
q2
—目的层下伏异常沉积体的沉积厚度,m;
20.将所述相对古地貌恢复值与所述印模厚度法对应的初始古地貌恢复值相加,确定所述目的层的最终古地貌恢复值,进行古地貌恢复。
21.可选的,所述建立目的层的层序地层框架,包括:
22.根据所述目标区域的地震剖面资料,建立所述目标区域的三维地层模型;
23.基于所述三维地层模型,拾取所述目标区域的所有地层面,并提取等时层序地层信息,建立所述层序地层框架。
24.可选的,所述对所述层序地层框架进行精细层序划分,包括:
25.采用小波分析法以及时频分析方法,对所述层序地层框架进行精细层序划分。
26.可选的,所述利用印模厚度法对所述目标区域的目的层进行初始古地貌恢复,包括:
27.选取所述目的层所对应的上覆地层顶界,并获取所述上覆地层顶界与所述目的层顶界之间的厚度;
28.根据所述厚度,对所述目的层进行初始古地貌恢复。
29.可选的,所述利用残余地层厚度法对所述目标区域的目的层进行初始古地貌恢复,包括:
30.确定所述目的层的下伏基准面,并获取所述下伏基准面与所述目的层顶界之间的厚度;
31.根据所述厚度,对所述目的层进行初始古地貌恢复。
32.可选的,所述异常沉积体包括前积体、退积体中的至少一种。
33.可选的,所述方法还包括:
34.利用钻井资料对所述最终古地貌恢复值进行校准。
35.另一方面,还提供了一种古地貌恢复装置,所述古地貌恢复装置包括:
36.划分模块,用于建立目标区域的层序地层框架,对所述层序地层框架进行精细层序划分;
37.初始古地貌恢复模块,用于分别利用印模厚度法和残余地层厚度法对所述目标区域的目的层进行初始古地貌恢复;
38.第一确定模块,用于当所述目的层含有异常沉积体时,若所述印模厚度法对应的初始古地貌恢复趋势与所述残余地层厚度法对应的初始古地貌恢复趋势一致,则采用如下公式确定所述目的层的相对古地貌恢复值:
39.h=(h
1max-h1 h2 h
q2
)/3,
40.若不一致时,则采用如下公式获取所述目的层的相对古地貌恢复值:
41.h=(h
1max-h1 h
q1
h2 h
q2
)/4
42.式中:
43.h—所述目的层的相对古地貌恢复值,m;
44.h
1max
—所述目的层的上覆地层沉积最大厚度值,m;
45.h1—所述目的层中待恢复位置的上覆地层沉积厚度值,m;
46.h2—所述目的层的下伏地层沉积厚度,m;
47.h
q1
—目的层上覆异常沉积体的沉积厚度,m;
48.h
q2
—目的层下伏异常沉积体的沉积厚度,m;
49.第二确定模块,用于将所述相对古地貌恢复值与所述印模厚度法对应的初始古地貌恢复值相加,确定所述目的层的最终古地貌恢复值,进行古地貌恢复。
50.可选的,所述划分模块,用于:
51.根据所述目标区域的地震剖面资料,建立所述目标区域的三维地层模型;
52.基于所述三维地层模型,拾取所述目标区域的所有地层面,并提取等时层序地层信息,建立所述层序地层框架。
53.可选的,所述划分模块,用于:
54.采用小波分析法以及时频分析方法,对所述层序地层框架进行精细层序划分。
55.本发明实施例提供的技术方案带来的有益效果是:
56.本发明实施例所提供的古地貌恢复方法,通过识别目标区域目的层内是否含有异常沉积体,来考虑内部层序是否发生变化以及地层剥蚀的影响,并同时结合印模厚度法和残余地层厚度法,对目的层的古地貌进行准确恢复,弥补了现有技术所存在的技术问题,使得恢复结果精度高,降低了结果的多解性,实现过程工作量小,可推广性强。
附图说明
57.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
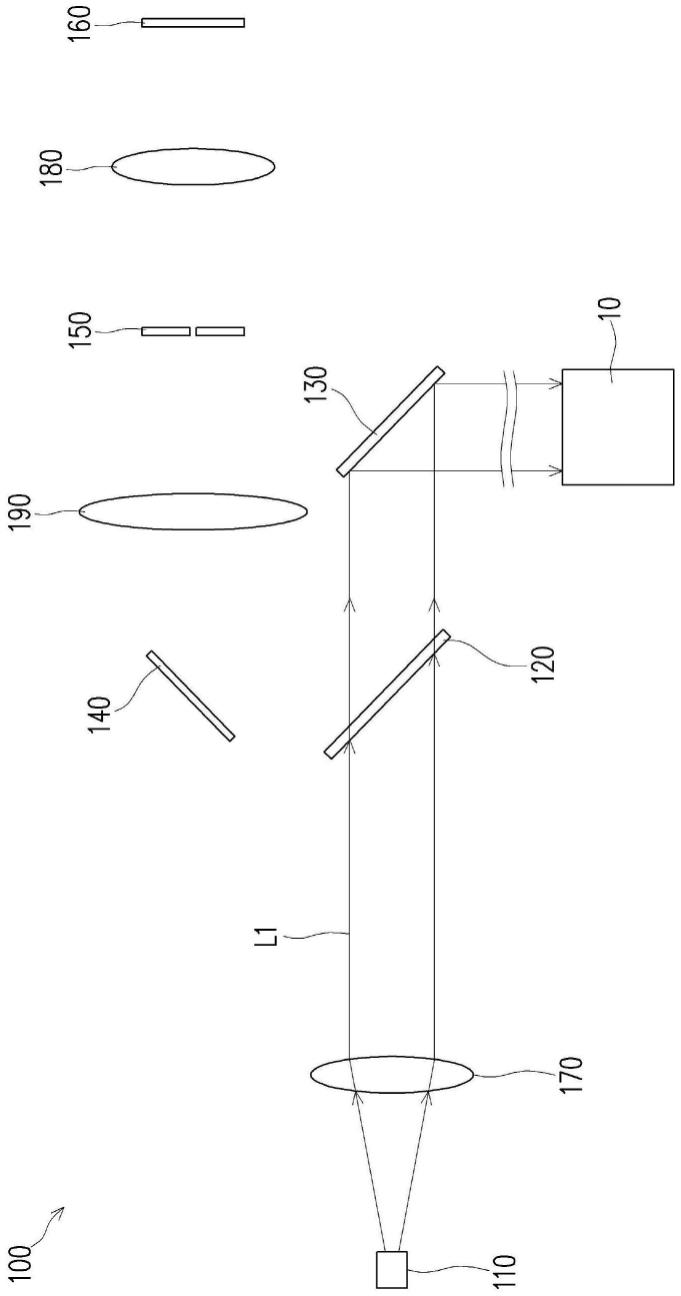
58.图1是本发明实施例提供的一种目的层古地貌的求取原理示意图;
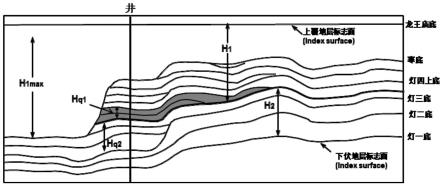
59.图2是本发明实施例提供的一种利用印膜厚度法形成的灯四段沉积前古地貌的示意图;
60.图3是本发明实施例提供的一种利用残余地层厚度法形成的灯四段沉积前古地貌的示意图;
61.图4是本发明实施例提供的一种利用残余地层厚度法形成的灯三段沉积前古地貌的示意图;
62.图5是本发明实施例提供的一种利用残余地层厚度法形成的灯一、灯二段沉积前古地貌的示意图;
63.图6是本发明实施例提供的一种利用残余地层厚度法形成的灯一、灯二、灯三段沉积前古地貌的示意图;
64.图7是本发明实施例提供的一种灯四段内部的沉积体的厚度分布示意图;
65.图8是本发明实施例提供的一种灯四段沉积前的最终古地貌恢复示意图;
66.图9是本发明实施例提供的一种古地貌恢复装置的结构示意图;
67.图10是本发明实施例提供的一种古地貌恢复装置的结构示意图。
具体实施方式
68.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地详细描述。
69.本发明实施例提供了一种古地貌恢复方法,该古地貌恢复方法包括:
70.步骤s1、建立目标区域的层序地层框架,对层序地层框架进行精细层序划分。
71.步骤s2、分别利用印模厚度法、残余地层厚度法对目标区域的目的层进行古地貌恢复。
72.步骤s3、当所述目的层含有异常沉积体时,若印模厚度法对应的古地貌恢复趋势与残余地层厚度法对应的古地貌恢复趋势一致时,采用如下公式确定目的层的相对古地貌恢复值:
73.h=(h
1max-h1 h2 h
q2
)/3,
74.若印模厚度法对应的古地貌恢复趋势与残余地层厚度法对应的古地貌恢复趋势不一致时,采用如下公式确定目的层的相对古地貌恢复值:
75.h=(h
1max-h1 h
q1
h3 h
q2
)/4
76.式中:
77.h—目的层的相对古地貌恢复值,m;
78.h
1max
—目的层的上覆地层沉积最大厚度值,m;
79.h1—目的层中待恢复位置的上覆地层沉积厚度值,m;
80.h2—目的层的下伏地层沉积厚度,m;
81.h
q1
—目的层上覆异常沉积体的沉积厚度,m;
82.h
q2
—目的层下伏异常沉积体的沉积厚度,m;
83.步骤s4、将相对古地貌恢复值与印模厚度法对应的初始古地貌恢复值相加,确定目的层的最终古地貌恢复值,进行古地貌恢复。
84.其中,上述各个参数之间的关系,可以参见附图1。需要说明的是,利用印模厚度法对目的层的古地貌恢复趋势与利用残余地层厚度法对目的层的古地貌恢复趋势一致是指,针对于目的层同一位置要么均是高势区,要么均是低势区。
85.可见,本发明实施例所提供的古地貌恢复方法,通过识别目标区域目的层内是否含有异常沉积体,来考虑内部层序是否发生变化以及地层剥蚀的影响,并同时结合印模厚度法和残余地层厚度法,对目的层的古地貌进行准确恢复,弥补了现有技术所存在的技术问题,使得恢复结果精度高,降低了结果的多解性,实现过程工作量小,可推广性强。
86.下面就本发明实施例所提供的古地貌恢复方法的各个步骤进行描述:
87.针对于步骤s1,主要是通过层序地层框架的高分辨率层序地层学理论对目的层进行精细层序划分,以对目的层的层序结构进行精确描述,达到能准确判断目的层中是否具有异常沉积体的目的。
88.需要说明的是,所谓“高分辨率”的实质是指对不同级次地层基准面旋回进行划分和等时对比的高精度时间辨率,即高分辨率的时间—地层单元划分。
89.其中,可通过如下方法可建立目标区域的层序地层框架:
90.步骤101、根据目标区域的地震剖面资料,建立目标区域的三维地层模型。
91.具体为,获取目标区域的地震资料,并根据地震资料中的地震剖面,查找目标区域的已有层位以及断层,进而通过全局等时层序构建方法建立目标区域的三维地层模型。
92.步骤102、基于三维地层模型,拾取目标区域的所有层序界面以及异常体的等时层序地层信息,从而能够精准建立层序地层框架。
93.其中,层序地层框架还可以称为等时地层框架。
94.该步骤可以具体为:在三维地层模型的全三维数据体中拾取目的层的所有层序界面,以及在三维地层模型的地震数据体中提取等时层序地层信息(包括解释不整合面,断层和主要的层位信息),对其进行曲线参数化处理,建立参数空间域(uvt)变换,关联三维地层
模型空间域中每一个(x,y,z)点到上述空间域(uvt)中的一个(u,v,t)点。
95.其中,全三维数据体是包含层序地层信息的地震数据体,通过全局等时层序构建方法,拾取目标区域层序界面信息后,建立三位地层模型,便可以提取目标层序信息。
96.其中,地震数据体包含振幅、频率和波形等地震波反射的基本信息。
97.之后,为了提高层序划分的精度,采用小波分析法以及时频分析方法,对所述目标区域进行精细层序划分。
98.具体为:根据目标区域的地震数据以及地震解释数据,对目标区域的地震剖面进行时频分析,并根据目标区域的测井资料,进行小波变换,待小波变换之后,将小波变换的结果对时频分析划分层序的结果进行标定和修正,实现层序的精细划分。
99.其中,地震资料(即包括地震数据与地震解释数据)在横向上具有良好的连续性,能反映沉积特征的特点,但纵向分辨率差;测井资料具有较强的纵向分辨率,但是与地震剖面的吻合程度差。基于地震资料与测井资料的特点,本发明实施例采用小波变换与时频分析相结合的方法进行层序划分,不仅可提高与地震剖面的吻合程度,也达到了对层序进行精细划分的目的。
100.针对于步骤s2,分别利用印模厚度法、残余地层厚度法对目标区域的目的层进行初始古地貌恢复。
101.其中,利用印模厚度法对目标区域的目的层进行初始古地貌恢复,包括:
102.步骤s21、选取目的层所对应的上覆地层顶界,并获取上覆地层顶界与目的层顶界之间的厚度(即附图1所示的h1)。
103.其中,上覆地层顶界的选取需要满足以下几个条件:能够全区对比追踪、等时性强且沉积前没有大的构造运动。
104.步骤s22、根据厚度,对目的层进行古地貌形态描述。
105.其中,通过上覆地层顶界与目的层顶界之间厚度的镜像关系来表征古地貌形态,厚度小的区域代表古地貌高势区,厚度大的区域代表古地貌低势区。
106.另外,利用残余地层厚度法对目标区域的目的层进行初始古地貌恢复,包括:
107.步骤s23、确定目的层的下伏基准面,并获取下伏基准面与目的层顶界之间的厚度(即附图1所示的h2、h3)。
108.其中,下伏基准面可以为目的层底界未遭受大量剥蚀且未经历剧烈的构造运动的可全区对比追踪的界面。
109.步骤s24、根据厚度,对目的层进行古地貌形态描述。
110.具体为,通过下伏基准面与目的层顶界之间的厚度,来表征古地貌形态,厚度小的区域代表古地貌高势区,厚度大的区域代表古地貌低势区。
111.其中,目的层的下伏地层厚度变化对目的层沉积前古地貌存在一定的继承性。因此,可结合上一步印模法古地貌恢复结果来分析其与下伏地层厚度之间趋势的差异和吻合之处。
112.针对于步骤s3而言,异常沉积体包括前积体、退积体中的至少一种。其中,尽管在一个时期的古地貌上局部前积或退积形成的沉积体在后期会因地质构造运动而使得地形发生变化直至演化成现今的构造,但是其上的沉积体依然会保留有其在沉积时期基本一致的分布或形态。换句话说,在现今地震剖面上发现的异常沉积体(参见附图1),如前积体,它
的分布范围和厚度变化受该沉积时期的古地貌影响较大,因此有必要考虑这些异常沉积体对目的层的古地貌恢复的影响。
113.针对于步骤s4而言,可具体为,利用对目的层的古地貌影响较大的下伏地层厚度和异常沉积体厚度变化趋势对目的层的初始古地貌进行约束,即直接将印模厚度法对应的初始古地貌恢复值加上相对古地貌恢复值,确定目的层的最终古地貌恢复值。
114.进一步地,为了保证目的层的古地貌恢复值的精度,本发明实施例中,还利用钻井资料对目的层的最终古地貌恢复值进行校准。具体为,利用钻井资料对目的层的古地貌进行恢复,然后将该恢复结果与本发明实施例所获取的恢复结果进行比对,若这两者的恢复趋势不一致的话,重新执行步骤s1至步骤s3,直至这两者恢复趋势一致。
115.综上所述,本发明实施例所提供古地貌恢复方法,一方面,同时考虑了上覆地层厚度和下伏地层厚度对目的层沉积的影响;另一方面将目的层的地震地层接触关系、厚度变化、沉积间断等地质信息从层序地层框架中加以量化,对局部不整合沉积体系进行雕刻成像,将其厚度变化趋势对前期结果进行约束,避免了仅仅利用残余地层厚度法和印模厚度法进行古地貌恢复无法兼顾地层内沉积变化的缺点。
116.本发明实施例以高石梯-磨溪地区灯影组为例,并利用上述所提供的古地貌恢复方法进行古地貌恢复。
117.其中,该地区的深层(埋藏深度5000~6000m)古老白云岩岩溶且存在地层剥蚀,且该地区目的层局部还存在前积体的异常沉积体。该高石梯-磨溪地区根据目前的地层划分方案,震旦系灯影组可划分为4段,自下而上分别为:灯影组一段、灯影组二段、灯影组三段、灯影组四段。其中,灯影组四段(以下简称灯四段)储集层是丘滩相白云岩受桐湾ⅱ幕大气淡水岩溶改造而成,且相控岩溶作用是优质储集层形成的关键,故将灯四段作为目的层,进行古地貌恢复。
118.首先,建立高石梯-磨溪地区的三维地层模型,并拾取区域的所有地层层面信息以及等时层序地层信息,建立层序地层框架,对层序地层框架进行精细层序划分。
119.其次,利用印模厚度法进行初始古地貌恢复,其恢复结构参见附图2。其中,首先优选合理的上覆地层顶界,具体为,在震旦系灯影组上覆的寒武系筇竹寺组—沧浪铺组沉积时期为一个完整的海侵—海退旋回,主要为补偿沉积,对震旦系灯影组受剥蚀古地貌基本填平补齐,并且筇竹寺组—沧浪铺组沉积晚期乐山—龙女寺古隆起区构造运动相对稳定;而震旦系灯影组沉积时期随着海平面的下降,台地边界整体向东迁移,虽然盆地西部遭受了强烈剥蚀,并且不同位置剥蚀量有差异,但总的来看表层剥蚀厚度基本在0~50m之间,而灯四段残余地层厚度在270~340m之间,因此,震旦系灯四段底—沧浪铺组顶(即龙王庙底)的印模厚度能基本反映灯四段沉积前的古地貌特征,但是精确度不够。加之该地区内高品质地震资料三维连片面覆盖,因此,选取沧浪铺组顶界作为上覆地层顶界,与灯四段底界的印模厚度趋势来表征灯四段沉积前的古地貌是可行的。
120.然后,形成灯三段、灯一、二、三段和灯一、二段的残余地层厚度图(参见附图3、附图4、附图5、附图6)。由于灯四段下伏地层灯一、二段沉积较稳定,后期遭受剥蚀量较小,地层厚度较大,普遍在400m以上;而灯三段是离灯四段最近的下伏地层,沉积较稳定,后期遭受剥蚀量较小,该层厚度小,普遍在20-80m之间。同时,灯三段与灯四段之间剥蚀程度低,灯四段沉积受其下伏地层古地貌影响较大。因此,灯四段下伏地层厚度变化对灯四段沉积前
古地貌存在一定的继承性。结合上一步印模法古地貌恢复结果来分析其与下伏地层厚度之间趋势的差异和吻合之处。
121.其次,在三维地层模型的基础上识别出灯四段内部存在的前积沉积层,其识别结果如附图6所示,刻画其分布范围并形成前积层厚度图。这些前积沉积体在磨溪地区灯四段内部普遍存在由西向东的超覆现象(参见附图1),主要是在沉积期受海水进退和古地貌影响形成的进积层,前积沉积层的结构、分布范围和厚度变化直接反应了沉积期的地貌差异。
122.另外,研究该地区古地貌对古岩溶分布的控制作用较明显,岩溶斜坡为最有利于古岩溶发育的部位,这些部位水动力较强,交替活跃,致使水平和垂直形态的岩溶普遍发育,形成叠加的多套水平溶洞层相。岩心分析显示,灯四段大量发育溶蚀孔洞,在镜下薄片上也见到粒间溶蚀孔洞,该地区在古地貌斜坡区域取心段溶洞所占比例大同时洞密度多大于30个/m。本区钻井资料较丰富,完钻井已超过70口,在大量实测数据面前,可以反向刻画岩溶古地貌发育的基本规律。
123.最后,在以上条件建立之后,当印模法与残余地层厚度法古地貌恢复结果趋势变化一致时,则用公式一恢复古地貌;在印模厚度与灯四段残余地层厚度变化趋势背离时,则重点参考异常沉积体厚度变化趋势和实测岩溶分布规律,运用公式二对符合这一规律的结果进行加权。最后以完钻井古地貌恢复值(参见表1)对恢复结果进行标定,获得最终古地貌恢复值(参见附图8)。
124.表1该区完钻井古地貌恢复值统计表
125.井名上覆沉积层厚度值(m)古地貌恢复值(m)mx8353.13246.87mx9358.28241.72mx10464.84135.16gs18427.04172.96gs19341.60258.40gs21231.01368.99gs101325.33274.67gs103331.58268.42gs105334.94265.06gs109442.89157.11gs111296.76303.24
………
126.其中,表1中第二列是钻井古地貌的厚度值,第三列为最终古地貌恢复值。
127.可见,本发明实施例提供的方法,便于地质研究,将灯四沉积前古地貌划分为古地貌高地、古地貌陡坡、古地貌缓坡和古地貌洼地(参见附图8),分析灯四沉积前后古地貌与灯四段岩溶储集层发育分布的关系,预测出古地貌缓坡为岩溶储层发育优势区,解决了深层古老碳酸盐岩岩溶储层有利储集区划分的一大难题。同时该成果可指导高石梯-磨溪地区的开发井位部署工作,操作人员在有利于岩溶储层发育的古地貌分布区(古地貌缓坡区)部署4口开发井,经过实钻均位于古地貌缓坡区,同时经过测试其无阻流量均超过100
×
104m3/d,实现了开发井高产的目标。因此通过该本发明实施例得到的灯四段沉积前后古地
貌成果,为研究该区储层分布及岩溶分布创造了有利条件,同时也为研究区气田井位部署和增储上产提供了重要的参考依据。
128.本实施例还提供了一种古地貌恢复装置,如图9所示,所述古地貌恢复装置包括:
129.划分模块910,用于建立目标区域的层序地层框架,对所述层序地层框架进行精细层序划分;
130.初始古地貌恢复模块920,用于分别利用印模厚度法和残余地层厚度法对所述目标区域的目的层进行初始古地貌恢复;
131.第一确定模块930,用于当所述目的层含有异常沉积体时,若所述印模厚度法对应的初始古地貌恢复趋势与所述残余地层厚度法对应的初始古地貌恢复趋势一致,则采用如下公式确定所述目的层的相对古地貌恢复值:
132.h=(h
1max-h1 h2 h
q2
)/3,
133.若不一致时,则采用如下公式获取所述目的层的相对古地貌恢复值:
134.h=(h
1max-h1 h
q1
h2 h
q2
)/4
135.式中:
136.h—所述目的层的相对古地貌恢复值,m;
137.h
1max
—所述目的层的上覆地层沉积最大厚度值,m;
138.h1—所述目的层中待恢复位置的上覆地层沉积厚度值,m;
139.h2—所述目的层的下伏地层沉积厚度,m;
140.h
q1
—目的层上覆异常沉积体的沉积厚度,m;
141.h
q2
—目的层下伏异常沉积体的沉积厚度,m;
142.第二确定模块940,用于将所述相对古地貌恢复值与所述印模厚度法对应的初始古地貌恢复值相加,确定所述目的层的最终古地貌恢复值,进行古地貌恢复。
143.可选的,所述划分模块910,用于:
144.根据所述目标区域的地震剖面资料,建立所述目标区域的三维地层模型;
145.基于所述三维地层模型,拾取所述目标区域的所有地层面,并提取等时层序地层信息,建立所述层序地层框架。
146.可选的,所述划分模块910,用于:
147.采用小波分析法以及时频分析方法,对所述层序地层框架进行精细层序划分。
148.可选的,所述初始古地貌恢复模块920,用于:
149.选取所述目的层所对应的上覆地层顶界,并获取所述上覆地层顶界与所述目的层顶界之间的厚度;
150.根据所述厚度,对所述目的层进行初始古地貌恢复。
151.可选的,所述初始古地貌恢复模块920,用于:
152.确定所述目的层的下伏基准面,并获取所述下伏基准面与所述目的层顶界之间的厚度;
153.根据所述厚度,对所述目的层进行初始古地貌恢复。
154.可选的,所述异常沉积体包括前积体、退积体中的至少一种。
155.可选的,如图10所示,所述装置还包括校准模块950,用于利用钻井资料对所述最终古地貌恢复值进行校准。
156.需要说明的是:上述实施例提供的古地貌恢复装置在古地貌恢复时,仅以上述各功能模块的划分进行举例说明,实际应用中,可以根据需要而将上述功能分配由不同的功能模块完成,即将装置的内部结构划分成不同的功能模块,以完成以上描述的全部或者部分功能。另外,上述实施例提供的古地貌恢复装置与古地貌恢复方法实施例属于同一构思,其具体实现过程详见方法实施例,这里不再赘述。
157.上述所有可选技术方案,可以采用任意结合形成本公开的可选实施例,在此不再一一赘述。
158.以上所述仅为本发明的一种实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。