技术特征:
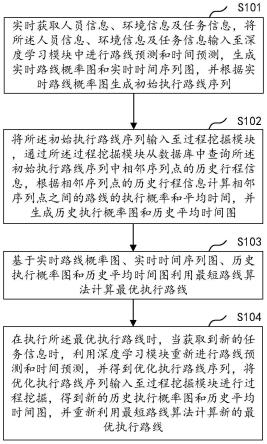
1.一种便民服务任务路线规划方法,其特征在于,包括:实时获取人员信息、环境信息及任务信息,将所述人员信息、环境信息及任务信息输入至深度学习模块中进行路线预测和时间预测,生成实时路线概率图和实时时间序列图,并根据实时路线概率图生成初始执行路线序列;将所述初始执行路线序列输入至过程挖掘模块,通过所述过程挖掘模块从数据库中查询所述初始执行路线序列中相邻序列点的历史行程信息,根据相邻序列点的历史行程信息计算相邻序列点之间的路线的执行概率和平均时间,并生成历史执行概率图和历史平均时间图;基于实时路线概率图、实时时间序列图、历史执行概率图和历史平均时间图利用最短路线算法计算最优执行路线;在执行所述最优执行路线时,当获取到新的任务信息时,利用深度学习模块重新进行路线预测和时间预测,并得到优化执行路线序列,将优化执行路线序列输入至过程挖掘模块进行过程挖掘,得到新的历史执行概率图和历史平均时间图,并重新利用最短路线算法计算新的最优执行路线。2.根据权利要求1所述的便民服务任务路线规划方法,其特征在于,所述将所述人员信息、环境信息及任务信息输入至深度学习模块中进行路线预测和时间预测,生成实时路线概率图和实时时间序列图,包括:将服务人员的人员信息、环境信息及任务信息输入至fdnet框架的路线预测模块进行路线预测,得到每个序列点之间的路线的执行概率;将每个序列点之间的路线的执行概率输入至fdnet框架的时间预测模块进行时间预测,得到每个序列点之间的路线对应的时间;根据每个序列点之间的路线的执行概率和每个序列点之间的路线对应的时间生成实时路线概率图和实时时间序列图。3.根据权利要求1所述的便民服务任务路线规划方法,其特征在于,所述通过所述过程挖掘模块从数据库中查询所述初始执行路线序列中相邻序列点的历史行程信息,根据相邻序列点的历史行程信息计算相邻序列点之间的路线的执行概率和平均时间,并生成历史执行概率图和历史平均时间图,包括:获取一段时间内相邻序列点之间的历史服务人员行驶信息条目,并根据历史服务人员行驶信息条目中的行驶日志或轨迹,计算相邻序列点之间的路线对应的执行概率和平均时间,并生成历史执行概率图和历史平均时间图。4.根据权利要求3所述的便民服务任务路线规划方法,其特征在于,所述根据历史服务人员行驶信息条目中的行驶日志或轨迹,计算相邻序列点之间的路线对应的执行概率和平均时间,包括:按下式计算执行概率:其中,k为循环迭代的变量,k∈(1,2,3
…
m),m是查询结果的数量,td
{i,j}
(t)表示t时刻
从l
i
到l
j
的概率,l
i
和l
j
为两个相邻的序列点,nxn表示图矩阵维度。5.根据权利要求1所述的便民服务任务路线规划方法,其特征在于,所述基于实时路线概率图、实时时间序列图、历史执行概率图和历史平均时间图利用最短路线算法计算最优执行路线,包括:将实时路线概率图、实时时间序列图、历史执行概率图和历史平均时间图按照预设的分组规则进行分组,并根据预定义的信息素图对每一组进行初始化,得到多组初始化序列;按照预设的概率规则选择每一组初始化序列的路线,并对每一组初始化序列的路线进行迭代处理,得到最优执行路线。6.根据权利要求5所述的便民服务任务路线规划方法,其特征在于,所述按照预设的概率规则选择每一组初始化序列的路线,包括:利用以下公式计算每两个序列点之间的路线概率:其中[τ
{i,j}
]为位置i和位置j之间已存在的路线轨迹,[η
{i,j}
]为位置i和j之间可用的启发信息,所述启发信息为实时时间序列图或历史平均时间图或其两者中选择的2个序列点之间的时间,是k在i点可以到达的点集,k∈(1,2,3
…
m),m是查询结果的数量,α和β分别是控制路线轨迹和启发信息相对影响的参数。7.根据权利要求5所述的便民服务任务路线规划方法,其特征在于,所述对每一组初始化序列的路线进行迭代处理,得到最优执行路线,包括:按照以下公式进行迭代计算:其中,ρ是挥发率,范围为(0,1],τ
{i,j}
是当前路线经过次数,表示对于任意2点(i,j)。8.一种便民服务任务路线规划系统,其特征在于,包括:深度学习模块预测单元,用于实时获取人员信息、环境信息及任务信息,将所述人员信息、环境信息及任务信息输入至深度学习模块中进行路线预测和时间预测,生成实时路线概率图和实时时间序列图,并根据实时路线概率图生成初始执行路线序列;历史行程信息查询单元,用于将所述初始执行路线序列输入至过程挖掘模块,通过所述过程挖掘模块从数据库中查询所述初始执行路线序列中相邻序列点的历史行程信息,根据相邻序列点的历史行程信息计算相邻序列点之间的路线的执行概率和平均时间,并生成历史执行概率图和历史平均时间图;最优执行路线计算单元,用于基于实时路线概率图、实时时间序列图、历史执行概率图和历史平均时间图利用最短路线算法计算最优执行路线;最优执行路线更新单元,用于在执行所述最优执行路线时,当获取到新的任务信息时,利用深度学习模块重新进行路线预测和时间预测,并得到优化执行路线序列,将优化执行路线序列输入至过程挖掘模块进行过程挖掘,得到新的历史执行概率图和历史平均时间
图,并重新利用最短路线算法计算新的最优执行路线。9.一种计算机设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述的便民服务任务路线规划方法。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序当被处理器执行时使所述处理器执行如权利要求1至7任一项所述的便民服务任务路线规划方法。
技术总结
本发明公开了一种便民服务任务路线规划方法、系统及其相关组件,该方法包括:实时获取人员信息、环境信息及任务信息并输入至深度学习模块中进行预测,生成实时路线概率图、实时时间序列图以及初始执行路线序列;将初始执行路线序列输入至过程挖掘模块计算相邻序列点之间的路线的执行概率和平均时间,生成历史执行概率图和历史平均时间图;利用最短路线算法计算最优执行路线;并在获取到新的任务信息时重新计算新的最优执行路线。本发明通过深度学习模块和过程挖掘模块获取实时数据和历史数据,基于实时数据和历史数据计算最优执行路线并进行实时更新,解决了服务人员在增加新任务后无法快速更新最优执行路线的问题,提高了服务人员的服务效率。务人员的服务效率。务人员的服务效率。
技术研发人员:起亚
受保护的技术使用者:深圳市万物云科技有限公司
技术研发日:2022.04.28
技术公布日:2022/8/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。