1.本技术涉及永磁体式旋转电机的控制装置。
背景技术:
2.永磁体式旋转电机是指将永磁体设置在转子上,将电枢绕组设置在定子上的旋转励磁形结构。该永磁体式旋转电机发挥两种功能,一种是搭载在混合动力汽车等上,接受来自发动机的机械能,作为发电机发挥功能;另一种是接受电能产生驱动力,作为电动机发挥功能。
3.通常,将搭载在车辆上的永磁体式旋转电机作为电动机驱动时的控制是通过基于由同步旋转变压器等磁极位置传感器检测出的转子的磁极位置,控制流向旋转电机的电枢绕组的电流来进行的。但是,如果由于磁极位置传感器的安装误差或位置偏差等,导致磁极位置的检测值偏离实际的磁极位置,则存在无法获得所期望转矩的问题。
4.针对该问题,目前采取的是将磁极位置传感器的检测值校正到实际的转子的磁极位置。例如,在专利文献1所公开的现有控制装置中,在永磁体式旋转电机的转子进行旋转的状态下,在将dq矢量控制中的d轴电流指令值和q轴电流指令值两者保持为零的同时,执行dq矢量控制的处理,根据在执行时求出的d轴电压指令值和q轴电压指令值,基于规定的运算式计算磁极位置校正量,校正磁极位置传感器所检测到的磁极检测位置。
5.另外,在专利文献2所示出的现有的同步电机的控制装置中,检测车辆是否即将停止,当判断车辆即将停止时,将d轴电流指令值和q轴电流指令值设为零,基于此时的d轴电压指令值和q轴电压指令值,检测与磁极位置传感器的检测相位的相位差,并基于该相位差校正检测相位。
6.另外,专利文献1和专利文献2所示的控制是dq矢量控制,d轴是磁极产生的磁通的方向(永磁体的中心轴),将与该d轴电、磁正交的轴(永磁体间的轴)设定为q轴,是在dq坐标系上进行的旋转电机的控制。现有技术文献专利文献
7.专利文献1:日本专利第3688673号公报专利文献2:日本专利第5642251号公报
技术实现要素:
发明所要解决的技术问题
8.在专利文献1和专利文献2公开的现有控制装置中,均根据d轴电压指令值和q轴电压指令值计算磁极位置校正量。d轴电压指令值以及q轴电压指令值在转换为三相电压指令后,为了使指令电压与实际电压一致,需要进行死区时间校正等,但有时由于元件偏差导致无法进行确切的校正,指令电压与实际电压之间产生误差。也就是说,当死区时间校正中包含误差时,基于该死区
时间校正计算出的磁极位置校正量也会产生误差。在这种情况下,通过专利文献1、2所记载的方法计算出的磁极位置校正量的精度变差。
9.鉴于上述现有的缺点,本技术的目的是提供一种永磁体式旋转电机的控制装置,在计算磁极位置校正量时,能减少校正量的偏差,并能高精度地进行磁极位置原点校正。用于解决技术问题的技术手段
10.本技术的永磁体式旋转电机的控制装置,其特征在于,包括:磁极位置检测单元,该磁极位置检测单元用于检测永磁体式旋转电机的磁极位置;逆变器,该逆变器基于载波对开关元件进行pwm控制并进行功率转换;中点电平判定单元,该中点电平判定单元检测连接到所述逆变器的正极侧的开关元件和连接到负极侧的开关元件之间的中点电位,对所述中点电位与基准电位进行比较,当所述中点电位大于所述基准电位时输出为hi,当所述中点电位小于所述基准电位时输出为lo;以及磁极位置原点校正量运算单元,所述磁极位置原点校正量运算单元在所述交流旋转电机进行旋转的状态下,将dq矢量控制中的d轴电流指令值和q轴电流指令值两者保持为零的同时,对所述中点电平判定单元的输出为hi的时间进行计数,并根据与所述载波的周期的比率计算占空比值,从计算出的所述占空比值和所述磁极位置转换到二轴旋转坐标系,计算出二相信号,从所述二相信号计算磁极位置原点校正量,根据计算出的所述磁极位置原点校正量,进行磁极位置原点校正。发明效果
11.根据本技术的永磁体式旋转电机的控制装置,基于从二相信号计算出的磁极位置校正量,高精度地进行磁极位置原点校正
附图说明
12.图1是示出本技术的实施方式的永磁体式旋转电机的控制装置的结构图。图2是本技术的实施方式的中点电平判定单元的结构图。图3是本技术的实施方式的中点电平判定单元的结构图。图4是本技术的实施方式的逆变器控制装置的结构图。图5是示出本技术的实施方式的用于进行磁极位置原点校正量计算的结构的框图。图6是示出到磁极位置原点校正量计算为止的流程的比较例的框图。图7是本技术的实施方式的占空比运算块的说明图。图8是本技术的实施方式的永磁体式旋转电机的控制装置的动作说明的流程图。图9是示出本技术的实施方式的实施磁极位置原点校正的条件的说明图。图10是示出本技术的实施方式的实施磁极位置原点校正的条件的说明图。图11是示出本技术的实施方式的永磁体式旋转电机的控制装置的结构图。图12是示出本技术的实施方式的控制装置的简要结构的框图。图13是示出本技术的实施方式的控制装置的简要结构的框图。
具体实施方式
13.[整体结构]
以下,使用附图说明本技术的永磁体式旋转电机的控制装置的实施方式。另外,在以下实施方式中,将永磁体式旋转电机作为电动机进行说明,并将永磁体式旋转电机的控制装置作为电动机控制装置搭载在混合动力汽车上的情况进行说明,当然电动机控制装置也可以搭载在混合动力汽车以外的车辆上。图1是示出实施方式的电动机控制装置的整体结构的结构图。
[0014]
[电源]直流电源10能进行充放电,经由逆变器20与电动机30交换电力。也可以在直流电源10与逆变器20之间设置升压转换器,并通过dc/dc转换对由直流电源10提供的直流电压进行升压。
[0015]
[电动机]电动机30被施加从逆变器20输出的交流电压,由此来控制车辆的驱动力和制动力。在电动机30的周围设置有用于检测转子的磁极位置的磁极位置检测单元31和用于检测温度的温度检测单元32。磁极位置检测单元31使用霍尔元件或编码器来构成,输出表示相对于电动机30的转子的规定基准旋转位置的磁极位置θr(q轴的旋转角度)的检测值的信号作为磁极位置的检测信号rsl。因磁极位置检测单元31的组装误差等导致由磁极位置检测单元31获得的磁极位置θr的检测值通常相对于电动机30的转子的实际磁极位置(磁极的实际旋转角度)产生误差。
[0016]
[逆变器]逆变器20包括滤波电容器11、pn电压检测单元12、多个开关元件2uh、2ul、2vh、2vl、2wh、2wl、驱动多个开关元件2uh、2ul、2vh、2vl、2wh、2wl的栅极驱动电路70、电流检测单元60、中点电平判定单元50,并在直流电源10和电动机30之间进行dc/ac功率转换。
[0017]
滤波电容器11连接在高电压侧节点p和低电压侧节点n之间,构成为对直流电压进行滤波。pn电压检测单元12测量滤波电容器11的高电压侧节点p和低电压侧节点n之间的电压,即直流电源10的电压值,并将电源电压值vpn输出到逆变器控制装置40。
[0018]
在逆变器20中,将半导体开关元件和半导体整流元件相互反向并联连接而得到的结构作为功率半导体元件的单元。此外,将功率半导体元件的串联连接体称为桥臂。这里,对逆变器20的详细结构进行说明。逆变器20内的桥臂的设置数量与所驱动的电动机30的相数对应,如图1所示,逆变器20包括u相、v相、w相三个开关臂2uh、2ul、2vh、2vl、2wh和2wl。
[0019]
逆变器20的u相开关臂2uh、2ul使用例如以si为材料的绝缘栅双极晶体管(igbt)作为半导体开关元件21a、21b,使用同样以si为材料的pin二极管作为半导体整流元件22a、22b。另外,使用其它材料也无妨。
[0020]
半导体整流元件22a的阴极电极k连接到半导体开关元件21a的集电极电极c,半导体整流元件22a的阳极电极a连接到半导体开关元件21a的发射极电极e,并且相互反向并联连接,从而成为功率半导体元件的一个单元。另外,同样地,半导体开关元件21b的集电极电极c与半导体整流元件22b的阴极电极k连接,半导体开关元件21b的发射极电极e与半导体整流元件22b的阳极电极a连接。由此,逆变器20的u相开关臂2uh、2ul通过串联连接由半导体开关元件21a和半导体整流元件22a构成的功率半导体元件与由半导体开关元件21b和半
导体整流元件22b构成的功率半导体元件来构成。
[0021]
逆变器20的v相开关臂2vh、2vl也通过串联连接由半导体开关元件21c和半导体整流元件22c构成的功率半导体元件与由半导体开关元件21d和半导体整流元件22d构成的功率半导体元件来构成,逆变器20的w相开关臂2wh、2wl也通过串联连接由半导体开关元件21e和半导体整流元件22e构成的功率半导体元件与由半导体开关元件21f和半导体整流元件22f构成的功率半导体元件来构成。
[0022]
另外,逆变器控制装置40控制逆变器20中包括的上臂侧功率半导体元件2uh、2vh、2wh以及下臂侧功率半导体元件2ul、2vl、2wl的半导体开关元件的开关动作,调整与电动机30的连接节点uac、vac、wac的电位,从而控制流过电动机30的电流量。
[0023]
栅极驱动电路70根据来自逆变器控制装置40的导通/关断信号(pwm指令),使包括在逆变器20中的开关臂的上臂侧功率半导体元件2uh、2vh、2wh和下臂侧功率半导体元件2ul、2vl、2wl内的半导体开关元件21a至21f进行导通/关断动作。
[0024]
电流检测单元60检测流过电动机30的各相线圈的电流(相电流)iu,iv、iw,并将其输出到逆变器控制装置40。
[0025]
中点电平判定单元50将检测到的各个中点电压值vu、vv、vw与基准电位分别进行比较,并将比较结果作为hi或lo输出到逆变器控制装置40。
[0026]
图2示出了实施方式的中点电平判定单元50的结构和波形图。其中,波形图仅记载了u相。对中点电压值vu与基准电位进行比较,当中点电压值vu大于基准电位时输出为hi的比较结果vu_level,当中点电压值vu低于基准电位时输出为lo的比较结果vu_level。即,将检测到的电压转换为二值电平信号。对于v相、w相也同样进行。在图2中示出了使用比较器的结构,但是作为其他结构,例如也可以使用ad转换器的结构。此外,可以采用在中点电压值与基准电位的比较时设置延迟的形式。
[0027]
进而,如图3所示,也可以构成为基于由pn电压检测单元12检测出的电源电压值vpn来对基准电位进行运算(例如,将vpn[v]
×
50[%]作为基准电位)。通过采用图3的结构,即使在电源电压值vpn发生变动的情况下,也能够确切地进行hi和lo的判定。
[0028]
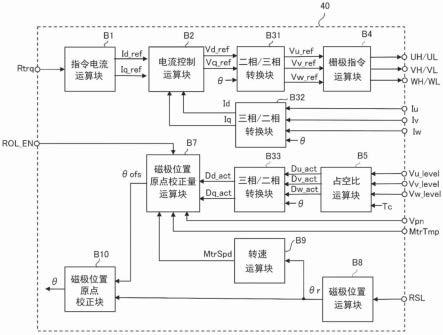
[控制装置]如图4所示,逆变器控制装置40包括指令电流运算块b1、电流控制运算块b2、二相/三相转换块b31、三相/二相转换块b32、b33、栅极指令运算块b4、磁极位置原点校正量运算块b7、磁极位置原点校正块b10、占空比运算块b5、磁极位置运算块b8、转速运算块b9。
[0029]
逆变器控制装置40通过dq矢量控制来控制电动机30。该逆变器控制装置40中的指令电流运算块b1根据电动机30中产生的转矩的指令值即转矩指令值rtrq(从逆变器控制装置40的外部提供)运算d轴电流指令值id_ref和q轴电流指令值iq_ref,并将其输出到电流控制运算块b2。
[0030]
电流控制运算块b2接受来自指令电流运算块b1的d轴电流指令值id_ref及q轴电流指令值iq_ref和来自三相/二相转换块b32的d轴电流值id及q轴电流值iq,运算d轴电压指令值vd_ref及q轴电压指令值vq_ref,以使d轴电流值id及q轴电流值iq之间的偏差为“0”,并将运算结果输出到二相/三相转换块b31。
[0031]
二相/三相转换块b31基于来自磁极位置原点校正块b10的磁极位置θ,将d轴电压指令值vd_ref和q轴电压指令值vq_ref转换为三相交流电压指令值vu_ref、vv_ref、vw_
ref。
[0032]
栅极指令运算块b4基于三相交流电压指令值vu_ref、vv_ref、vw_ref和载波(carrier)生成提供给开关元件的导通/关断信号,并将其输出到栅极驱动电路70进行pwm控制。
[0033]
转速运算块b9基于来自磁极位置运算块b8的输出θr运算转速mtrspd。
[0034]
[核心内容]接着,对磁极位置原点校正处理(rol:resolver offset learning,以下称为rol)进行说明。在磁极位置原点校正中,首先在电动机30旋转的状态下,将dq轴矢量控制中的d轴电流指令值id_ref和q轴电流指令值iq_ref设为0[a](id_ref=0[a],iq_ref=0[a])。
[0035]
在id_ref=0[a]、iq_ref=0[a]的状态下,进行图5所示流程的运算,根据检测到的相电压值vu、vv、vw计算磁极位置原点校正量θofs。如图5所示,在中点电平判定单元50、占空比运算块b5、三相/二相转换块b33以及磁极位置原点校正量运算块b7中进行运算。
[0036]
首先,在中点电平判定单元50中,将相电压值vu、vv、vw转换为二值电平信号vu_level、vv_level、vw_level。接下来,在占空比运算块b5中,计算各相的实际占空比值du_act、dv_act、dw_act。
[0037]
然后,在三相/二相转换块b33中,基于实际占空比值du_act、dv_act、dw_act和来自磁极位置原点校正块b10的输出的磁极位置θ的值,进行二轴旋转坐标系转换,并计算二相信号dd_act、dq_act。使用上述二相信号dd_act、dq_act,磁极位置原点校正量运算块b7运算并输出磁极位置原点校正量θofs。
[0038]
这里,作为比较例,说明与本技术不同的计算方法。图6是表示直到由检测到的相电压值vu、vv、vw计算实际相电压波形vu_act、vv_act、vw_act,由实际d轴电压vd_act、实际q轴电压vq_act运算磁极位置原点校正量θofs并输出为止的流程的框图。
[0039]
这里,包括中点电平判定单元50、占空比运算块b5、相电压运算块b50、三相/二相转换块b33以及磁极位置原点校正量运算块b7,构成为基于实际占空比值du_act、dv_act、dw_act和电源电压值vpn,从实际d轴电压vd_act和实际q轴电压vq_act运算并输出磁极位置原点校正量θofs。
[0040]
在该比较例中,由于使用了电源电压值vpn,因此,如果假设电源电压值不稳定的情况,则对使用施加了限制,与此相对,根据本技术的实施方式,具有放宽使用条件的优点。
[0041]
由于检测出的相电压值vu、vv、vw为脉冲波形,因此即使直接进行三相/二相转换,也无法计算出正确的实际d轴电压、实际q轴电压。因此,按照图6所示的流程进行运算,从脉冲波形转换为正弦波。
[0042]
这里,中点电平判定单元50设为图2的结构,基准电位例如为逆变器20进行功率转换时的直流电源10的最低电压(逆变器20的动作下限电压)与0[v]之间的任意值。
[0043]
当u相上侧开关元件2uh为导通(u相下侧开关元件2ul为关断)时,由于连接到高电压侧节点p,因此u相的相电压值vu与直流电源10的电压值基本一致,达到基准电位以上,中点电平判定单元50的输出vu_level为hi。
[0044]
另一方面,当u相上侧开关元件2uh为关断(u相下侧开关元件2ul为导通)时,由于
连接到低电压侧节点n,因此u相的相电压值vu变为0[v],小于基准电位,并且中点电平判定单元50的输出vu_level变为lo。v相及w相也是同样。
[0045]
另外,在本实施方式中,示出了将中点电平判定单元50设置在逆变器控制装置40之外的情况,也可以将检测出的相电压值vu、vv、vw输入到逆变器控制装置40,通过逆变器控制装置40内的运算进行与中点电平判定单元50同样的处理。
[0046]
在占空比运算块b5中,如图7所示,将中点电平判定单元50的输出vu_level、vv_level、vw_level为hi的时间分别计为导通时间ton_u、ton_v、ton_w。
[0047]
然后,通过下面的式(1),从载波的周期(载波周期)tc和导通时间ton_u、ton_v、ton_w,计算每个载波周期内开关元件的导通时间即占空比值。[数学式1]
※
x=u,v,w
[0048]
通过这种方式,能测量开关元件实际导通的时间,即使由于元件特性的偏差等导致指令的占空比值与实际的占空比值不一致时,也能计算各相的实际占空比值du_act、dv_act、dw_act。
[0049]
在三相/二相转换块b33中,基于实际占空比值du_act、dv_act、dw_act和来自磁极位置原点校正块b10的输出的磁极位置θ的值,进行二轴旋转坐标系转换,并计算二相信号dd_act、dq_act。[数学式2]
[0050]
磁极位置原点校正量运算块b7使用二相信号dd_act、dq_act,基于下面的式(3)进行运算,并将磁极位置原点校正量θofs输出到磁极位置原点校正块b10。[数学式3]
[0051]
以下,对能够通过式(3)计算磁极位置原点校正量θofs的理由进行说明。
[0052]
如以下式(4)所示,能利用d轴电压和q轴电压通过反正切计算磁极位置原点校正量θofs。这里,vd_act和vq_act表示实际d轴电压和实际q轴电压。[数学式4]
[0053]
能基于实际相电压vu_act、vv_act、vw_act和磁极位置θ通过三相/二相转换求出实际d轴电压vd_act、实际q轴电压vq_act。从实际相电压vu_act、vv_act、vw_act到实际d轴电压vd_act、实际q轴电压vq_act
的三相/二相转换如下式(5)所示。[数学式5]
[0054]
另一方面,能利用下面的式(6),基于由式(1)计算出的实际占空比du_act、dv_act、dw_act以及pn电压检测单元12的检测值vpn来计算实际相电压vu_act、vv_act、vw_act。[数学式6]vx_act=(dx_act-0.5)
×
vpn
…
(6)
※
x=u,v,w
[0055]
将式(6)应用于式(5),则得到式(7)。[数学式7]
[0056]
并且,如果在这里将式(2)应用于式(7),则能变形成式(8)那样。[数学式8]
[0057]
式(4)能从式(8)如下面那样变形。[数学式9]因此,能通过式(3)计算磁极位置原点校正量。
[0058]
磁极位置原点校正块b10存储并保持来自磁极位置原点校正量运算块b7的磁极位置校正量θofs,根据存储并保持的磁极位置校正量θofs和来自磁极位置检测块mb的磁极位置θr,基于运算式θ=θr-θofs计算实际磁极位置θ,并将其输出到二相/三相转换块b31和三相/二相转换块b32。
[0059]
[磁极位置原点校正处理(rol)]如图8的流程图所示那样执行上述rol。首先,在步骤s100中开始处理,在步骤s101中,获取发动机的动作状态。如果发动机处于启动前的状态,则转移到步骤s108,如果发动机没有处于启动前的状态,则转移到步
骤s102。
[0060]
在步骤s108中,当已经执行rol并设定了磁极位置校正量θofs时,再次转移到步骤s101并重复上述动作。在未设定磁极位置校正量θofs时,在步骤s109中,磁极位置校正量θofs保存初始值。该初始值优选为基于磁极位置检测单元31的公差或安装精度的值。
[0061]
在步骤s102中,获取发动机的动作状态,如果发动机处于启动中的状态,则处理转移到步骤s101,并重复上述动作。在发动机处于启动中的状态下,磁极位置校正量θofs被设定为初始值,因此有时无法产生最佳的转矩,但能获得发动机启动所需的转矩。在没有处于启动中的状态时(启动后),转移到步骤s103。
[0062]
也就是说,在从发动机启动前到启动后的期间,发动机的转速如图9所示那样进行变化。在发动机启动前,发动机的转速当然为零,在发动机启动中,转速达到规定转速以上,并进入稳定状态,在发动机启动后,处于转速在稳定范围内脉动的状态。根据该发动机的转速,例如,发动机的转速在erth1~erth2范围内的状态持续规定时间后,实施磁极位置原点校正量的运算。也就是说,通过在永磁体式旋转电机的转速恒定的状态下进行磁极位置原点校正,从而能避开会导致运算精度变差的条件,能高精度地进行磁极位置原点校正。
[0063]
在步骤s103中,判断是否满足实施rol的条件,在满足的情况下,转移到步骤s104。在无法满足时,转移至上述步骤s101,重复上述动作。
[0064]
在步骤s104中,将d轴电流指令值id_ref和q轴电流指令值iq_ref设定为零。结果,流过电动机30的u、v、w各相的电枢电流被控制为基本为零。
[0065]
在步骤s105中,等待预先确定的时间,直到电动机30的各相的电枢电流充分收敛到零附近,然后计算磁极位置校正量θofs,并转移到步骤s106。或者,在等待预先确定的时间之后,在d轴电流id和q轴电流iq恒定的情况下,转移到步骤s106,在没有收敛到恒定的情况下,结束处理。通过在d轴电流和q轴电流处于恒定状态时进行磁极位置原点校正,从而能避开会导致运算精度变差的条件,能高精度地进行磁极位置原点校正。
[0066]
在步骤s106中,在磁极位置原点校正块b10中存储并保持在磁极位置原点校正量运算块b7中计算出的磁极位置校正量θofs,并通过步骤s107结束rol处理。这里,可以限制磁极位置校正量θofs,使得磁极位置校正量θofs在预先确定的阈值的范围内。在该步骤s106中,将存储并保持在磁极位置原点校正块b10中的磁极位置校正量θofs与磁极位置θr一同运算,计算实际磁极位置θ。
[0067]
在以上说明的rol的处理中,基于逆变器的中点电压计算磁极位置校正量θofs,从而能够正确地校正磁极位置,减小功率因数和效率的降低。
[0068]
另外,中点电平判定单元50也可以采用图3所示的结构,基于由pn电压检测单元12检测到的pn电压vpn计算基准电位。
[0069]
基准电位只能是p侧电位和n侧电位之间的值(直流电源10的电压范围内),否则中点电平判定单元的输出无法恰当地输出。例如,在基准电位为大于p侧电位的值的情况下,中点电平判定单元的输出始终为lo。如图3所示,如果采用基于pn电压vpn决定基准电位的结构,则在直流电源被更换为电压不同的电源时,即使不变更基准电位也能自动调整,能够适当地判定hi和lo。
[0070]
步骤s103中的rol的实施条件可以设为当图1所示的偏移校正允许信号rol_en为允许时,实施rol。由此,通过基于允许信号进行磁极位置原点校正,能防止在进入原点位置
的计算处理时发生意料之外的转矩变动。
[0071]
另外,rol实施的条件可以设定为:由图1的磁极位置检测单元31检测到的电动机30的转速在预先设定的阈值的范围内,或者由图1的pn电压检测单元12检测到的滤波电容器11的高电压侧节点p和低电压侧节点n之间的电压值vpn在预先设定的阈值的范围内。
[0072]
图10示出了电动机30的转速与电压值vpn之间的关系在预先确定的阈值的范围内的情况的一个示例。
[0073]
由于电动机30中,感应电压与转速成比例地产生,因此当电动机30处于高转速时,电动机30的感应电压有时会超过直流电源的电压。在这种情况下,需要将d轴电流控制为负值,d轴电流和q轴电流不会变为0[a]。式(3)和式(4)在d轴电流和q轴电流均为0[a]时,可以得到正确的运算结果,因此在d轴电流和q轴电流均不为0[a]时,无法正确地运算。
[0074]
预先基于电压值vpn和电动机转速设定允许计算磁极位置校正量的条件(图10所示的rol区域的范围),将进入rol区域的状态持续规定时间为开始条件来进行磁极位置校正量的运算,从而能避开会导致运算精度变差的条件,高精度地计算磁极位置校正量。
[0075]
另外,实施rol的条件可以是从图1所示的磁极位置检测单元31计算出的电动机30的转速恒定的条件。
[0076]
此外,当根据由图1中的温度检测单元32检测到的电动机30的温度或磁体的温度来改变上述电动机30的转速的阈值时,能避开会导致运算精度变差的条件,能高精确地校正磁极位置原点。
[0077]
另外,以由图1的pn电压检测单元12检测到的电压vpn恒定作为条件,可以仅在基本恒定的情况下计算磁极位置校正量并执行控制。另外,当电压值vpn变动且不稳定时,占空比输出和电压输出无法恰当地输出,d轴电流和q轴电流也难以控制为0[a],磁极位置校正量无法高精确地计算。这样,只有在直流电源的电压基本恒定的情况下进行磁极位置原点校正,才能避开会导致运算精度变差的条件,能高精度地进行磁极位置原点校正。
[0078]
另外,在上述实施方式中,将永磁体式旋转电机作为电动机进行了说明,针对将永磁体式旋转电机的控制装置作为电动机控制装置搭载在混合动力汽车上的情况进行了说明,如图11所示,在搭载在混合动力汽车上的情况下,电动机30与发动机301的输出轴(驱动轴)连结,并且通过电动机的启动来使发动机启动。此外,处于通过发动机301使电动机30旋转的状态。
[0079]
在这种情况下,在逆变器控制装置40中设置有临时校正值(第一校正值)已被设定的启动时控制单元,在由电动机30启动发动机301规定时间之后,基于中点电位检测进行磁极位置原点校正,从而能够进行适当的电动机30的控制。
[0080]
也就是说,直到电动机30的旋转达到预先确定的状态为止,使用第一校正值来控制电动机,当电动机30的旋转达到规定状态时,基于中点电位检测来进行磁极位置原点校正。即使在磁极位置原点校正之前,为了使发动机301能够被电动机30启动,发动机301的这种启动也是需要的。
[0081]
此外,在图4所示的逆变器控制装置40中,将磁极位置原点校正量运算块b7的输出的磁极位置校正量θofs直接提供给磁极位置原点校正块b10,然而,当该校正量由于某种原因变得极大时,作为其应对措施,如图12所示,对磁极位置原点校正量运算块b7的输出设置
校正量限制块lb,从而能够应对磁极位置校正量θofs变为意料之外的值的情况。
[0082]
如果在中点电平判定单元50等中产生缺陷时,计算出的校正量可能较大地偏离需要的值。在这种情况下,转矩的误差反而变得比进行校正之前更大。因此,例如,可以基于磁极位置检测单元31的公差或安装位置的精度等来确定阈值,在发生输出值超过阈值的情况下,使用校正前的值来继续控制,并进行故障显示。
[0083]
图1和图4所示的逆变器控制装置由图13所示的硬件实现。即,包括:处理器200、存储程序和数据的存储器201、输入输出设备202、以及连接它们的数据总线203。虽然存储器201的内容未图示,但具备随机存取储存器等易失性存储装置、闪存等非易失性的辅助存储装置。另外,也可以具备硬盘这样的辅助存储装置以代替闪存。处理器200执行从存储器201输入的程序。该情况下,程序从辅助存储装置经由易失性存储装置输入到处理器200。另外,处理器200可以将运算结果等数据输出至存储器201的易失性存储装置,也可以经由易失性存储装置将数据保存至辅助存储装置。
[0084]
本技术记载了例示性的实施方式,但实施方式所记载的各种特征、方式及功能并不限于特定的实施方式的适用,能单独或以各种组合适用于实施方式。因此,可以认为未例示的无数变形例也包含在本技术说明书所公开的技术范围内。例如,设为包含有对至少一个结构要素进行变形的情况、追加的情况或省略的情况。标号说明
[0085]
10直流电源,11滤波电容器,12pn电压检测单元,20逆变器,30电动机,31磁极位置检测单元,32温度检测单元,40逆变器控制装置,50中点电平判定单元,60电流检测单元,70栅极驱动电路,200处理器,201存储器,202输入输出设备,203数据总线,301发动机,b1指令电流运算块,b2电流控制运算块,b31二相/三相转换块,b32三相/二相转换块,b33三相/二相转换块,b4栅极指令运算块,b5占空比运算块,b7磁极位置原点校正量运算块,b8磁极位置运算块,b9转速运算块,b10磁极位置原点校正块,b50相电压运算块,lb校正量限制块。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
