1.本发明涉及一种电机转子位置检测方法。特别是涉及一种高频信号注入搜索线圈的电机转子位置检测系统及方法。
背景技术:
2.无刷直流电机因结构简单、运行可靠、效率高等优点,已广泛应用于航空航天、轨道交通、医疗器械和家用电器等领域。实现无刷直流电机的正常运行必须有转子的位置信息,位置传感器在高温、潮湿、污浊、高干扰等一些恶劣的运行条件难以保证可靠运行,位置传感器增加了电机的体积,其安装精度会直接影响到电机的可靠运行。因此实现无刷直流电机无位置传感器控制是非常有必要的,这已经成为一个研究热点。
3.当电机以较高的速度运行时,利用反电势与电机转子之间的位置关系,通过检测电枢绕组中的反电势来检测转子位置,此类方法发展得相对成熟,得到了较为广泛的运用。但反电势幅值的大小受电机转速的影响,当电机以较低的速度运行时,反电势幅值较小,检测起来较为困难,会产生较大的误差,因此当电机低速运行时反电势法不适用。
4.受电机凸极效应的影响,电机绕组电感变化特性与转子位置密切相关,其电感值不受电机转速的影响,因此通过电感法检测转子位置适用于电机低速运行状况。已有的电感法需要向电机绕组注入脉冲电压矢量,根据响应电流的大小来比较电感值的差异,但该响应电流较大,会产生不必要的电磁转矩,会对电机的正常运行产生较大的干扰。通过独立的高频信号源产生低压高频信号直接耦合注入至电枢绕组虽可以在检测出电感差异的同时减小不必要的电磁转矩,但当逆变器工作时,高频信号会流经逆变器被逆变器前侧电容或者电源短接,难以耦合注入至电枢绕组中,该方法实现起来较为困难。
技术实现要素:
5.本发明所要解决的技术问题是,为克服现有技术的不足,提供一种能够实现电枢绕组和低压高频信号回路强弱电之间的电气隔离,实现无刷直流电机的无位置传感器控制的高频信号注入搜索线圈的电机转子位置检测系统及方法。
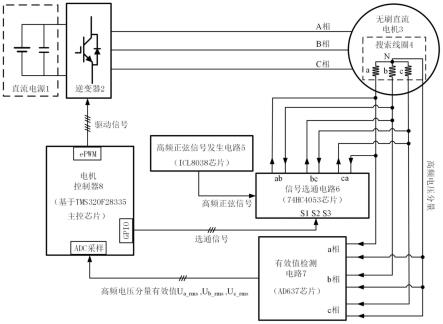
6.本发明所采用的技术方案是:一种高频信号注入搜索线圈的电机转子位置检测系统,包括有无刷直流电机,通过逆变器向无刷直流电机提供电源的直流电源,以及与逆变器相连用于控制逆变器工作的电机控制器,所述的无刷直流电机上设置有用于获取无刷直流电机转子位置并通过电感信号进行体现的搜索线圈,所述搜索线圈的引出端连接信号选通电路,并通过所述的信号选通电路获取与信号选通电路相连的高频正弦信号发生电路所发出的高频正弦信号,所述搜索线圈的引出端还连接有效值检测电路,用于将所述的电感信号与所述的高频正弦信号耦合后的信号送入有效值检测电路,所述有效值检测电路的输出端连接电机控制器,用于将检测到的搜索线圈每相绕组的高频电压分量有效值送入电机控制器,所述电机控制器根据所述的搜索线圈每相绕组的高频电压分量有效值控制逆变器的输出,所述电机控制器还连接所述的信号选通电路,用于控制所述信号选通电路不同输出
信号的选通。
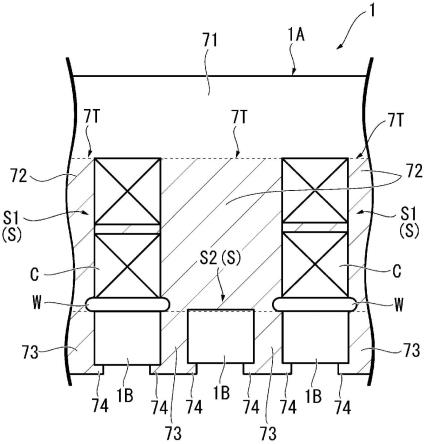
7.所述的搜索线圈包括有a相、b相和c相三相线圈,每一相线圈是以缠绕在电机定子对应相的一个齿上的布局方式嵌入在无刷直流电机内部结构中,三相线圈采用星型接法,每一相的引出端以及搜索线圈中性点引出端均引出至电机外部,所述的搜索线圈与电机电枢绕组之间互相绝缘,没有直接的电气连接。
8.一种高频信号注入搜索线圈的电机转子位置检测系统的检测方法,包括如下步骤:
9.1)对无刷直流电机的电枢绕组施加设定的电压矢量,对无刷直流电机进行初始预定位,使得电机转子n极处于0
°
至180
°
电角度区间,或处于180
°
至360
°
电角度区间;
10.2)电机控制器控制选通电路工作,高频正弦信号流经信号选通电路,依次注入搜索线圈的ab两相、bc两相和ca两相;
11.3)高频正弦信号注入搜索线圈的ab两相时,有效值检测电路将得到的a相和b相的高频正弦电压分别转换成有效值u
a_rms
和u
b_rms
;由于电感值越大,分得的高频电压越大,转化的有效值则越大,因此电机控制器通过采样有效值检测电路输出的有效值比较出a相电感la与b相电感lb的大小;同理,高频正弦信号注入搜索线圈的bc两相时,有效值检测电路将得到的b相和c相的高频正弦电压分别转换成有效值u
b_rms
和u
c_rms
,通过检测u
b_rms
和u
c_rms
比较出b相电感lb与c相电感lc的大小;同理,高频正弦信号注入搜索线圈的ca两相时,有效值检测电路将得到的c相和a相的高频正弦电压分别转换成有效值u
c_rms
和u
a_rms
,通过检测u
c_rms
和u
a_rms
比较出c相电感lc与a相电感la的大小;最后得出搜索线圈的三相电感la、lb和lc三者之间的大小关系;
12.4)根据搜索线圈的三相电感la、lb和lc三者之间的大小关系,以及步骤1)的初始预定位区间,确定电机转子n极所处精确的电角度区间;
13.5)电机控制器根据电机转子n极所处精确的电角度区间向逆变器施加相应的开关信号对无刷直流电机进行驱动;
14.6)返回步骤2)继续循环,实现无刷直流电机的无位置传感器控制下的连续运转。
15.步骤4)包括:
16.在l
a》
l
c≥
lb时,初步判断电机转子n极位于0
°
至30
°
或者180
°
至210
°
两个电角度区间;当电机转子n极初始预定位处于0
°
至180
°
电角度大区间时,判断电机转子n极处于0
°
至30
°
电角度小区间内;当电机转子n极初始预定位处于180
°
至360
°
电角度大区间时,判断电机转子n极处于180
°
至210
°
电角度小区间内;
17.在l
c≥
l
a》
lb时,初步判断电机转子n极位于30
°
至60
°
或者210
°
至240
°
两个电角度区间;当电机转子n极初始预定位处于0
°
至180
°
电角度大区间时,判断电机转子n极处于30
°
至60
°
电角度小区间内;当电机转子n极初始预定位处于180
°
至360
°
电角度大区间时,判断电机转子n极处于210
°
至240
°
电角度小区间内;
18.在l
c》
l
b≥
la时,初步判断电机转子n极位于60
°
至90
°
或者240
°
至270
°
两个电角度区间;当电机转子n极初始预定位处于0
°
至180
°
电角度大区间时,判断电机转子n极处于60
°
至90
°
电角度小区间内;当电机转子n极初始预定位处于180
°
至360
°
电角度大区间时,判断电机转子n极处于240
°
至270
°
电角度小区间内;
19.在l
b≥
l
c》
la时,初步判断电机转子n极位于90
°
至120
°
或者270
°
至300
°
两个电角度
区间;当电机转子n极初始预定位处于0
°
至180
°
电角度大区间时,判断电机转子n极处于90
°
至120
°
电角度小区间内;当电机转子n极初始预定位处于180
°
至360
°
电角度大区间时,判断电机转子n极处于270
°
至300
°
电角度小区间内;
20.在l
b》
l
a≥
lc时,初步判断电机转子n极位于120
°
至150
°
或者300
°
至330
°
两个电角度区间;当电机转子n极初始预定位处于0
°
至180
°
电角度大区间时,判断电机转子n极处于120
°
至150
°
电角度小区间内;当电机转子n极初始预定位处于180
°
至360
°
电角度大区间时,判断电机转子n极处于300
°
至330
°
电角度小区间内;
21.当l
a≥
l
b》
lc时,初步判断电机转子n极位于150
°
至180
°
或者330
°
至360
°
两个电角度区间;当电机转子n极初始预定位处于0
°
至180
°
电角度大区间时,判断电机转子n极处于150
°
至180
°
电角度小区间内;当电机转子n极初始预定位处于180
°
至360
°
电角度大区间时,判断电机转子n极处于330
°
至360
°
电角度小区间内。
22.本发明的高频信号注入搜索线圈的电机转子位置检测系统及方法,实现电机在低速运行时转子位置检测,解决电机在无位置传感器运行的条件下高频信号注入的难题,实现电枢绕组和低压高频信号回路强弱电之间的电气隔离。本发明的有益效果是:
23.1、本发明解决了反电势法在电机静止或低速运行时反电势幅值较小导致位置检测失效的问题,在电机静止或低速运行状态下仍可检测出转子位置。
24.2、本发明将高频正弦信号注入搜索线圈中,通过有效值检测电路得到搜索线圈每相绕组分得的电压大小从而比较出每相绕组之间的电感大小关系,实时检测出转子所处的电角度区间,便于无刷直流电机的换相控制。
25.3、本发明的搜索线圈与电机电枢绕组之间互相绝缘,没有直接的电气连接,避免电枢绕组中的强电对低压高频信号回路的影响,解决了电机运行时高频信号会被逆变器前侧电容或直流电源短接造成高频正弦信号难以注入的问题。
26.4、本发明实现了电枢绕组回路和低压高频信号回路强弱电之间的电气隔离。
附图说明
27.图1是本发明中搜索线圈的电感值的大小与转子位置之间的变化示意图;
28.图2是本发明的高频信号注入搜索线圈的电机转子位置检测系统构成示意图;
29.图3是搜索线圈的a相、b相和c相在电机中的布置示意图;
30.图4a是高频信号注入搜索线圈ab相与高频电压分量有效值检测等效电路示意图;
31.图4b是高频信号注入搜索线圈bc相与高频电压分量有效值检测等效电路示意图;
32.图4c是高频信号注入搜索线圈ca相与高频电压分量有效值检测等效电路示意图。
33.图中
34.1:直流电源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2:逆变器
35.3:无刷直流电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4:搜索线圈
36.5:高频正弦信号发生电路
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6:信号选通电路
37.7:有效值检测电路
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8:电机控制器
具体实施方式
38.下面结合实施例和附图对本发明的高频信号注入搜索线圈的电机转子位置检测
系统及方法做出详细说明。
39.如图2所示,本发明的高频信号注入搜索线圈的电机转子位置检测系统,包括有无刷直流电机3,通过逆变器2向无刷直流电机3提供电源的直流电源1,以及与逆变器2相连用于控制逆变器2工作的电机控制器8,所述的无刷直流电机3上设置有用于获取无刷直流电机3转子位置并通过电感信号进行体现的搜索线圈4,所述搜索线圈4的引出端连接信号选通电路6,并通过所述的信号选通电路6获取与信号选通电路6相连的高频正弦信号发生电路5所发出的高频正弦信号,所述搜索线圈4的引出端还连接有效值检测电路7,用于将所述的电感信号与所述的高频正弦信号耦合后的信号送入有效值检测电路7,所述有效值检测电路7的输出端连接电机控制器8,用于将检测到的搜索线圈4每相绕组的高频电压分量有效值送入电机控制器8,所述电机控制器8根据所述的搜索线圈4每相绕组的高频电压分量有效值控制逆变器2的输出,所述电机控制器8还连接所述的信号选通电路6,用于控制所述信号选通电路6不同输出信号的选通。
40.所述的搜索线圈4的电感值受电机转子凸极效应的影响而呈现出周期性的正弦规律变化,其电感值的大小与转子位置之间的变化规律如图1所示。搜索线圈4的三相绕组电感值的差异变化特性与电枢绕组a相、b相和c相电感值的差异变化特性有类似的变化规律。
41.搜索线圈4可以采用多种形态以及布局方式嵌入无刷直流电机内部结构中,搜索线圈可以绕制在电机定子齿上,三相搜索线圈采用星型接法,依次组合成a相、b相和c相线圈。
42.如图3所示,所述的搜索线圈4包括有a相、b相和c相三相线圈,每一相线圈是以缠绕在电机定子对应相的一个齿上的布局方式嵌入在无刷直流电机内部结构中,三相线圈采用星型接法,每一相的引出端以及搜索线圈中性点引出端均引出至电机外部,所述的搜索线圈4与电机电枢绕组之间互相绝缘,使搜索线圈4与电机电枢绕组之间没有直接的电气连接,高频信号回路与电机电枢绕组回路实现了强弱电之间的电气隔离。从而避免电枢绕组中的强电对低压高频信号回路的影响,解决了电机运行时高频信号会被逆变器前侧电容或直流电源短接造成高频正弦信号难以注入的问题。
43.在本发明的实施例中:
44.电机控制器8基于ti公司的tms320f28335主控芯片,具有adc采样功能,epwm模块发出的脉冲信号用于控制驱动逆变器开关管,其丰富的gpio口输出高低电平信号可用于控制外部电路。
45.高频正弦信号发生电路5所产生的高频信号是由信号源芯片icl8038发出,其发出的信号频率、幅值大小皆可灵活调节。
46.信号选通电路6采用模拟开关电路芯片74hc4053,所述74hc4053的s1,s2,s3引脚输入信号受电机控制器8的gpio输出信号控制,gpio口输出相应的高低电平控制74hc4053有选择性的通过高频信号,高频信号通过74hc4053依次注入至搜索线圈的ab相,bc相,ca相中,实现不同相的信号注入。
47.有效值检测电路7主要由有效值检测芯片ad637以及带宽中心频率与高频信号频率一致的带通滤波器构成,滤波器滤除电机运行时在搜索线圈中感应产生的低频噪声,提取出高频信号输入至ad637芯片,ad637芯片输出高频信号的有效值,有效值传送至电机控制器8的adc采样端口,电机控制器8将采样到的搜索线圈a相、b相、c相绕组分压得的高频信
号有效值进行处理。
48.本发明所述的高频信号注入搜索线圈的电机转子位置检测系统的检测方法,将高频信号源产生的低压高频正弦信号通过信号选通电路6分别注入到无刷直流电机搜索线圈4的ab相,bc相,ca相,有效值检测电路7提取每相绕组分得的高频电压有效值大小并将其传输至电机控制器8比较出每相绕组电感大小关系并根据搜索线圈4电感值随转子位置的变化特性来判断出电机转子所处的电角度区间,实现无刷直流电机的无位置传感器控制。具体包括如下步骤:
49.1)对无刷直流电机3的电枢绕组施加设定的电压矢量,对无刷直流电机3进行初始预定位,使得电机转子n极处于0
°
至180
°
电角度区间,或处于180
°
至360
°
电角度区间;
50.2)电机控制器8控制选通电路6工作,高频正弦信号流经信号选通电路6,依次注入搜索线圈4的ab两相、bc两相和ca两相;
51.3)高频正弦信号注入搜索线圈4的ab两相时,有效值检测电路7将得到的a相和b相的高频正弦电压分别转换成有效值(直流量)u
a_rms
和u
b_rms
,等效电路如图4a所示;由于电感值越大,分得的高频电压越大,转化的有效值则越大,因此电机控制器8通过采样有效值检测电路7输出的有效值比较出a相电感la与b相电感lb的大小;同理,高频正弦信号注入搜索线圈4的bc两相时,有效值检测电路7将得到的b相和c相的高频正弦电压分别转换成有效值u
b_rms
和u
c_rms
,通过检测u
b_rms
和u
c_rms
比较出b相电感lb与c相电感lc的大小,等效电路如图4b所示;同理,高频正弦信号注入搜索线圈4的ca两相时,有效值检测电路7将得到的c相和a相的高频正弦电压分别转换成有效值u
c_rms
和u
a_rms
,通过检测u
c_rms
和u
a_rms
比较出c相电感lc与a相电感la的大小,等效电路如图4c所示;最后得出搜索线圈4的三相电感la、lb和lc三者之间的大小关系;
52.4)根据搜索线圈4的三相电感la、lb和lc三者之间的大小关系,结合图1所示的电感分布特性以及步骤1)电机预定位区间,确定电机转子n极所处精确的电角度区间;包括:
53.在l
a》
l
c≥
lb时,初步判断电机转子n极位于0
°
至30
°
或者180
°
至210
°
两个电角度区间;当电机转子n极初始预定位处于0
°
至180
°
电角度大区间时,判断电机转子n极处于0
°
至30
°
电角度小区间内;当电机转子n极初始预定位处于180
°
至360
°
电角度大区间时,判断电机转子n极处于180
°
至210
°
电角度小区间内;
54.在l
c≥
l
a》
lb时,初步判断电机转子n极位于30
°
至60
°
或者210
°
至240
°
两个电角度区间;当电机转子n极初始预定位处于0
°
至180
°
电角度大区间时,判断电机转子n极处于30
°
至60
°
电角度小区间内;当电机转子n极初始预定位处于180
°
至360
°
电角度大区间时,判断电机转子n极处于210
°
至240
°
电角度小区间内;
55.在l
c》
l
b≥
la时,初步判断电机转子n极位于60
°
至90
°
或者240
°
至270
°
两个电角度区间;当电机转子n极初始预定位处于0
°
至180
°
电角度大区间时,判断电机转子n极处于60
°
至90
°
电角度小区间内;当电机转子n极初始预定位处于180
°
至360
°
电角度大区间时,判断电机转子n极处于240
°
至270
°
电角度小区间内;
56.在l
b≥
l
c》
la时,初步判断电机转子n极位于90
°
至120
°
或者270
°
至300
°
两个电角度区间;当电机转子n极初始预定位处于0
°
至180
°
电角度大区间时,判断电机转子n极处于90
°
至120
°
电角度小区间内;当电机转子n极初始预定位处于180
°
至360
°
电角度大区间时,判断电机转子n极处于270
°
至300
°
电角度小区间内;
57.在l
b》
l
a≥
lc时,初步判断电机转子n极位于120
°
至150
°
或者300
°
至330
°
两个电角度区间;当电机转子n极初始预定位处于0
°
至180
°
电角度大区间时,判断电机转子n极处于120
°
至150
°
电角度小区间内;当电机转子n极初始预定位处于180
°
至360
°
电角度大区间时,判断电机转子n极处于300
°
至330
°
电角度小区间内;
58.当l
a≥
l
b》
lc时,初步判断电机转子n极位于150
°
至180
°
或者330
°
至360
°
两个电角度区间;当电机转子n极初始预定位处于0
°
至180
°
电角度大区间时,判断电机转子n极处于150
°
至180
°
电角度小区间内;当电机转子n极初始预定位处于180
°
至360
°
电角度大区间时,判断电机转子n极处于330
°
至360
°
电角度小区间内。
59.5)电机控制器8根据电机转子n极所处精确的电角度区间向逆变器2施加相应的开关信号对无刷直流电机3进行驱动;
60.6)返回步骤2)继续循环,实现无刷直流电机的无位置传感器控制下的连续运转。
61.搜索线圈4三相电感大小关系与电机转子n极所处的电角度区间对应关系如表1所示。
62.表1搜索线圈三相电感大小与电机转子n极电角度区间对照
63.
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。