技术特征:
1.一种用于控制车辆的系统,所述系统包括:输入接口,所述输入接口被配置成接受所述车辆的当前状态、接近所述车辆的所述当前状态的环境的图像、以及所述车辆的目的地;存储器,所述存储器被配置成存储概率运动规划器和自适应预测控制器,其中,所述概率运动规划器被配置成接受所述车辆的当前状态、所述车辆的目的地、以及所述环境的图像,以生成关于定义所述车辆的运动规划的目标状态序列的参数概率分布序列,其中,各个参数概率分布的参数定义所述概率分布的一阶矩和至少一个高阶矩,其中,所述自适应预测控制器被配置成优化预测范围内的成本函数,以生成对所述车辆的一个或多个致动器的控制命令序列,其中,所述成本函数的优化对由所述一阶矩定义的所述目标状态序列中的不同状态变量的跟踪成本进行平衡,其中,在所述跟踪成本的平衡中,使用所述概率分布的所述高阶矩中的一个或多个高阶矩来对所述不同状态变量进行加权;处理器,所述处理器被配置成通过向所述概率运动规划器提交所述车辆的当前状态、所述车辆的目的地、以及所述环境的图像来执行所述概率运动规划器,并且所述处理器被配置成通过向所述自适应预测控制器提交由所述概率运动规划器生成的所述参数概率分布序列来执行所述自适应预测控制器,以生成所述控制命令序列;以及输出接口,所述输出接口被配置成向所述车辆的至少一个致动器输出由所述自适应预测控制器确定的至少一个控制命令。2.根据权利要求1所述的系统,其中,所述概率分布的所述高阶矩指示所述概率运动规划器关于所述车辆的所述运动规划的置信度,其中,所述自适应预测控制器随着所述置信度的增大而增大平衡优化中的所述跟踪的权重,从而允许预测的车辆状态值与所述目标状态序列的较低偏差,并且随着所述置信度的减小而减小所述平衡优化中的所述跟踪的权重,从而允许所述预测车辆状态值与所述目标状态序列的较大偏差。3.根据权利要求1所述的系统,其中,所述自适应预测控制器的执行速率大于所述概率运动规划器的执行速率,使得对于所述概率运动规划器的每次执行,所述处理器执行所述自适应预测控制器至少一次。4.根据权利要求3所述的系统,其中,所述运动规划将所述目标状态序列上的参数概率分布序列定义为大于所述预测范围的时间段的时间的函数。5.根据权利要求1所述的系统,其中,所述车辆的各个目标状态包括多个状态变量,使得每个参数概率分布是定义各个状态变量的分布的参数的多变量分布,使得所述参数概率分布的所述一阶矩是平均值,并且所述参数概率分布的所述高阶矩是具有在空间和时间上变化的值的协方差矩阵。6.根据权利要求1所述的系统,其中,所述概率运动规划器包括粒子滤波器,所述粒子滤波器在时间上传播一组粒子,以表示所述目标状态在时间实例处的一组似然,使得每个粒子包括所述目标状态在所述时间实例处的值的高斯分布,其中,所述时间实例的所述参数概率分布的所述一阶矩是所述粒子的加权平均,而所述时间实例的所述参数概率分布的所述高阶矩是所述粒子的加权协方差。7.根据权利要求1所述的系统,其中,所述自适应预测控制器是具有所述成本函数的模型预测控制器mpc,所述成本函数被公式化为时变阶段式最小二乘成本函数,所述成本函数包括利用时变正定加权矩阵加权的跟踪成本,所述时变正定加权矩阵具有从所述概率分布
的所述高阶矩导出的值。8.根据权利要求7所述的系统,其中,所述时变正定加权矩阵的所述值与由所述概率分布的所述高阶矩形成的协方差矩阵序列的值成反比。9.根据权利要求8所述的系统,其中,所述参数概率分布的所述高阶矩是针对各个控制目标单独确定的,并且mpc跟踪成本是利用时变正定对角加权矩阵来加权的,并且对角值中的每个对角值是基于与所述参数概率分布的对应的单独高阶矩中的各个高阶矩成反比的关系来计算的。10.根据权利要求9所述的系统,其中,所述自适应预测控制器在所述跟踪成本中使用时变正定加权矩阵,所述时变正定加权矩阵被计算为来自所述概率运动规划器的所述参数概率分布的所述协方差矩阵序列的阶段式缩放的逆。11.根据权利要求10所述的系统,其中,所述加权矩阵与协方差矩阵之间的逆关系包括性能特定缩放和饱和函数,所述性能特定缩放对于所述跟踪控制目标中的每个跟踪控制目标能够相对地不同,所述饱和函数将所述时变正定加权矩阵中的每个时变正定加权矩阵定界在所述跟踪成本函数中的所述控制目标中的每个控制目标的加权的下界与上界之间。12.根据权利要求11所述的系统,其中,所述处理器仅使用所述协方差矩阵的对角值,来计算所述加权矩阵的对角值,使得所述加权矩阵成为对角矩阵。13.根据权利要求1所述的系统,其中,所述成本函数的优化将跟踪由所述参数概率分布的所述一阶矩定义的所述目标状态序列的成本对照所述车辆的运动的至少一个其它度量的成本进行平衡,其中,在平衡优化中,使用所述概率分布的所述高阶矩中的一个或多个高阶矩来对所述跟踪成本的重要性进行加权。14.根据权利要求1所述的系统,其中,所述自适应预测控制器是模型预测控制器mpc,所述mpc使用经受基于控制目标选择的活动约束的受约束优化来对平衡成本函数进行优化,其中,所述自适应预测控制器向所述概率运动规划器反馈所述活动约束,所述概率运动规划器被配置成基于所述活动约束的类型和/或数量来调节所述概率分布的所述高阶矩。15.根据权利要求1所述的系统,其中,所述概率运动规划器使用一组控制函数,其中,每个控制函数被配置为基于所述控制函数的对应控制目标将所述车辆的所述当前状态转变成目标状态,其中,所述控制函数中的至少一些控制函数是概率性的并且包括用于将所述当前状态转变成所述目标状态的确定性分量和用于确定由所述确定性分量确定的所述目标状态周围的值的概率分布的概率性分量,使得概率控制函数的输出是关于所述目标状态的参数概率分布,所述参数概率分布定义了所述概率分布的一阶矩以及至少一个高阶矩。16.一种用于控制车辆的方法,其中,所述方法使用联接至存储器的处理器,所述存储器存储概率运动规划器和自适应预测控制器,其中,所述概率运动规划器被配置成接受车辆的当前状态、所述车辆的目的地、以及环境的图像,以生成关于定义所述车辆的运动规划的目标状态序列的参数概率分布序列,其中,每个参数概率分布的参数定义所述概率分布的一阶矩和至少一个高阶矩,其中,所述自适应预测控制器被配置成优化预测范围内的成本函数,以生成对所述车辆的一个或多个致动器的控制命令序列,其中,所述成本函数的优化对由所述一阶矩定义的所述目标状态序列中的不同状态变量的跟踪成本进行平衡,其中,在所述跟踪成本的平衡中,使用所述概率分布的所述高阶矩中的一个或多个高阶矩来
对所述不同状态变量进行加权,其中,所述处理器与执行所述方法的存储指令联接,其中,所述指令在由所述处理器执行时,执行所述方法的步骤,所述方法包括以下步骤:接受所述车辆的当前状态、接近所述车辆的所述当前状态的环境的图像、以及所述车辆的目的地;通过向所述概率运动规划器提交所述车辆的当前状态、所述车辆的目的地、以及所述环境的图像,来执行所述概率运动规划器;通过向所述自适应预测控制器提交由所述概率运动规划器生成的所述参数概率分布序列来执行所述自适应预测控制器,以生成所述控制命令序列;以及向所述车辆的至少一个致动器提交由所述自适应预测控制器确定的至少一个控制命令。17.根据权利要求16所述的方法,其中,所述成本函数的优化将跟踪由所述参数概率分布的所述一阶矩定义的所述目标状态序列的成本对照所述车辆的运动的至少一个其它度量的成本进行平衡,其中,在平衡优化中,使用所述概率分布的所述高阶矩中的一个或多个高阶矩来对所述跟踪成本的重要性进行加权。18.根据权利要求16所述的方法,其中,所述自适应预测控制器是具有所述成本函数的模型预测控制器mpc,所述成本函数被公式化为时变阶段式最小二乘成本函数,所述成本函数包括利用时变正定加权矩阵加权的跟踪成本,所述时变正定加权矩阵具有从所述概率分布的所述高阶矩导出的值。19.根据权利要求18所述的方法,其中,所述时变正定加权矩阵的所述值与由所述概率分布的所述高阶矩形成的协方差矩阵序列的值成反比。20.一种非暂时性计算机可读存储介质,该非暂时性计算机可读存储介质上实施程序,所述程序能够由处理器执行以执行方法,其中,所述非暂时性计算机可读存储介质存储概率运动规划器和自适应预测控制器,其中,所述概率运动规划器被配置成接受车辆的当前状态、所述车辆的目的地、以及环境的图像,以生成关于定义所述车辆的运动规划的目标状态序列的参数概率分布序列,其中,各个参数概率分布的参数定义所述概率分布的一阶矩以及至少一个高阶矩,其中,所述自适应预测控制器被配置成优化预测范围内的成本函数,以生成对所述车辆的一个或多个致动器的控制命令序列,其中,所述成本函数的优化对由所述一阶矩定义的所述目标状态序列中的不同状态变量的跟踪成本进行平衡,其中,在所述跟踪成本的平衡中,使用所述概率分布的所述高阶矩中的一个或多个高阶矩来对所述不同状态变量进行加权,所述方法包括以下步骤:接受所述车辆的当前状态、接近所述车辆的当前状态的环境的图像、以及所述车辆的目的地;通过向所述概率运动规划器提交所述车辆的当前状态、所述车辆的目的地、以及所述环境的图像,来执行所述概率运动规划器;通过向所述自适应预测控制器提交由所述概率运动规划器生成的所述参数概率分布序列来执行所述自适应预测控制器,以生成所述控制命令序列;以及向所述车辆的至少一个致动器提交由所述自适应预测控制器确定的至少一个控制命令。
技术总结
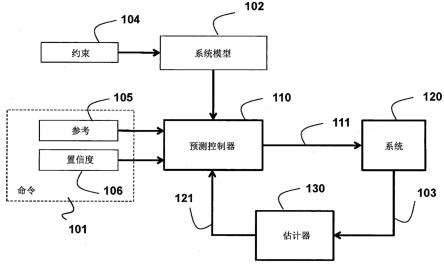
一种控制系统,该控制系统使用概率运动规划器和自适应预测控制器来控制车辆。该概率运动规划器利用定义一阶矩和高阶矩的参数,生成关于车辆的目标状态序列的参数概率分布序列。该自适应预测控制器优化预测范围内的成本函数,以生成对车辆的一个或多个致动器的控制命令序列。该成本函数对由一阶矩定义的目标状态序列中的不同状态变量的跟踪成本进行平衡。该平衡是通过使用概率分布的高阶矩中的一个或多个高阶矩对不同状态变量进行加权来执行的。多个高阶矩对不同状态变量进行加权来执行的。多个高阶矩对不同状态变量进行加权来执行的。
技术研发人员:R
受保护的技术使用者:三菱电机株式会社
技术研发日:2020.12.24
技术公布日:2022/8/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。