1.本实用新型属于电机充磁技术领域,具体涉及一种电机用磁瓦自动充磁结构。
背景技术:
2.永磁电机以永磁体提供励磁,使电动机结构较为简单,降低了加工和装配费用,且省去了容易出问题的集电环和电刷,提高了电动机运行的可靠性,磁能积高,可得到较高的气隙磁通密度,因此在容量相同时,永磁电机的体积小、重量轻,通常应用在工业、农业等领域;如图1所示,为电机壳与磁瓦的位置关系图,电机壳呈中空圆筒形,电机壳内侧壁上粘贴有两块磁瓦,在电机装配之前需要对磁瓦进行充磁操作。
3.而在现有的充磁过程中,需要工人手持工钳,挨个夹取电机壳并放置在充磁机内,充磁完成后,再由工人取下,充磁效率低,需要大量的人工投入,浪费成本;而且工人在取放电机壳的同时,要频繁的靠近充磁机,充磁机内部的磁场辐射会危害工人的身体健康,安全系数低。
技术实现要素:
4.本实用新型目的是为了克服现有技术的不足而提供一种电机用磁瓦自动充磁结构。
5.为达到上述目的,本实用新型采用的技术方案是:一种电机用磁瓦自动充磁结构,它包括:
6.输送组件,所述输送组件包括输送板、可转动地绕设在所述输送板上的输送带以及固定在所述输送带上的托盘;
7.支撑组件,所述支撑组件设置在所述输送组件的一侧,它包括可升降地设置在所述输送带上方的升降板、转动安装在所述升降板底部的翻转板、固定在所述翻转板底部且相配合使用的充磁铁芯和气动夹爪、用于带动所述升降板升降的第一驱动单元以及用于带动所述翻转板转动的第二驱动单元;
8.充磁组件,所述充磁组件设置在所述输送组件的一侧,它包括铁芯框、间隔固定在所述铁芯框内侧的封装盒、穿设在所述封装盒内的通电线圈以及与所述通电线圈相连的接线端子盒。
9.优化地,所述支撑组件还包括间隔设置的第一支撑柱、固定在所述第一支撑柱顶部的顶板、套设在所述第一支撑柱上的导向套、固定在所述翻转板底部的气动夹爪固定板以及固定在所述气动夹爪固定板底部的充磁铁芯固定板,所述升降板固定在所述导向套上,所述气动夹爪固定在所述气动夹爪固定板上,所述充磁铁芯固定在所述充磁铁芯固定板上。
10.优化地,所述充磁组件还包括多根第二支撑柱、固定在所述第二支撑柱顶部的支撑板、固定在所述支撑板顶部且位于所述封装盒之间的高度座、固定在所述高度座顶部的定位座以及固定在所述封装盒相向一侧的定位夹爪,所述铁芯框固定在所述支撑板上。
11.优化地,所述第一驱动单元为升降气缸,所述升降气缸的缸体固定在所述顶板上,所述升降气缸的导向杆连接在所述升降板上。
12.优化地,所述第二驱动单元为旋转气缸,所述旋转气缸的缸体固定在所述升降板底部,所述旋转气缸的旋转部固定在所述翻转板上。
13.优化地,所述支撑组件还包括拖链固定板、固定在所述拖链固定板上且与所述升降板相连的拖链以及固定在所述顶板上且朝向所述升降板的油压缓冲器。
14.由于上述技术方案的运用,本实用新型与现有技术相比具有下列优点:通过输送组件实现电机壳的自动传输;升降气缸带动充磁铁芯插入电机壳内,气动夹爪夹紧电机壳,在旋转气缸的带动下,旋转至充磁组件上方,升降气缸带动电机壳下降至定位座内,最后在通电线圈内部形成的磁场中完成磁瓦的充磁;整个充磁过程自动化程度高,两个工位可同时实现取放两个过程,大大提高了充磁的效率,而且整个充磁过程中,不需要人工的介入,相应的较少了人工成本,同时也避免了磁场辐射对工人身体产生的危害,安全系数高。
附图说明
15.图1为本实用新型电机壳与磁瓦的位置关系图;
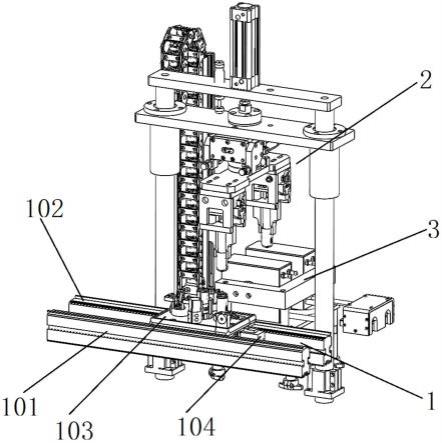
16.图2为本实用新型的结构示意图;
17.图3为本实用新型的右视图;
18.图4为本实用新型去掉输送组件后的主视图;
19.图5为本实用新型的局部结构示意图;
20.图6为本实用新型图5的主视图;
21.图7为本实用新型充磁组件的结构示意图;
22.图8为本实用新型充磁组件另一角度的结构示意图;
23.附图标记说明:
24.1、输送组件;101、输送板;102、输送带;103、托盘;104、托盘定位器;
25.2、支撑组件;201、第一支撑柱;202、导向套;203、顶板;204、升降板;205、升降气缸;206、油压缓冲器;207、拖链固定板;208、拖链;209、旋转气缸;210、翻转板;211、气动夹爪;212、气动夹爪固定板;213、充磁铁芯固定板;214、充磁铁芯;
26.3、充磁组件;301、第二支撑柱;302、支撑板;303、铁芯框;304、铁芯框支柱;305、高度座;306、定位座;307、封装盒;308、接线端子盒;309、通电线圈;310、定位夹爪。
具体实施方式
27.下面结合附图所示的实施例对本实用新型作进一步描述。
28.如图1所示,为电机壳与磁瓦的位置关系图,电机壳呈中空圆筒形,电机壳内侧壁上粘贴有两块磁瓦,主要用在永磁电机上。如图2-4所示,为本实用新型的结构示意图,它通常用于为图1所示的磁瓦充磁,它包括输送组件1、支撑组件2和充磁组件3。
29.输送组件1固定在车间的机台上,主要用于输送待充磁的磁瓦,它包括输送板101、输送带102、托盘103和托盘定位器104。输送板101有两块,它们间隔固定在机台上(输送板101的材质为不锈钢,通过螺丝紧固或者焊接的方式实现固定)。输送带102绕设在输送板101上(输送板101的两侧安装有转轴,输送带102绕设在转轴上,输送板101的侧面固定有伺
服电机,伺服电机的输出轴与转轴相连,带动转轴转的同时,带动输送带102同步转动,伺服电机未在图中示出;在本实施例中,输送带102选用塑胶输送带,因为塑胶材质的输送带102重量轻,在输送过程中无噪音)。托盘103固定在输送带102上(托盘103通过螺丝紧固的方式固定在输送带102上,且随着输送带102同步输送,托盘103上放置有电机壳,电机壳的内侧壁上粘贴有待充磁的磁瓦)。托盘定位器104固定在输送板101上,用于对输送中的托盘103定位,便于后续的夹取操作(托盘定位器104选用接触开关即可,当托盘103在输送过程中碰到接触开关,后台控制器则控制伺服电机停止动作)。
30.支撑组件2固定在机台上且位于输送组件1的一侧,用于将待充磁的电机壳夹取至充磁组件3进行充磁,与此同时,将充磁组件3处已经充磁好的电机壳夹取放置在托盘103上,它包括第一支撑柱201、导向套202、顶板203、升降板204、升降气缸205、油压缓冲器206、拖链固定板207、拖链208、旋转气缸209、翻转板210、气动夹爪211、气动夹爪固定板212、充磁铁芯固定板213和充磁铁芯214。第一支撑柱201有两根,它们固定在机台上(通过焊接的方式实现固定)。顶板203固定在两根第一支撑柱201的顶部(顶板203通过螺丝紧固的方式实现固定)。导向套202套设在第一支撑柱201上(导向套202的数量等于第一支撑柱201的数量)。升降板204固定在导向套202上,且沿着第一支撑柱201升降(升降板204是在第一驱动单元的带动下实现升降的,第一驱动单元为升降气缸205,升降气缸205的缸体固定在顶板203上,升降气缸205的导向杆连接在升降板204上,升降气缸205选用市售的dsbc-50-125型号)。油压缓冲器206固定在顶板203上且朝向升降板204(在升降板204上升的过程中,油压缓冲器206可减少震动及噪音,将升降板所产生之动能转换为热能并释放于大气中,在动作中将物体平衡有效的停止,油压缓冲器206选用市售的acj2525型号的即可)。
31.拖链固定板207固定在机台上,拖链208一端固定在拖链固定板207上,另一端固定在升降板204上(拖链固定板207通过螺丝紧固的方式固定在机台上,拖链208选用桥式拖链,用于束缚与升降气缸205相连的导线)。翻转板210可转动地设置在升降板204的底部(翻转板210是在第二驱动单元的带动下实现转动的,第二驱动单元为旋转气缸209,旋转气缸209的缸体固定在升降板204的底部,旋转气缸209的旋转部固定在翻转板210上)。翻转板210的底部固定有两组夹取机构,其中一组用于将待充磁的电机壳夹取至充磁组件3进行充磁,与此同时,另一组将充磁组件3处已经充磁好的电机壳夹取放置在托盘103上,如图5、6所示,每组夹取机构包括气动夹爪211、气动夹爪固定板212、充磁铁芯固定板213和充磁铁芯214。气动夹爪固定板212有两块,它们通过螺丝紧固的方式固定在翻转板210的下表面。气动夹爪211固定在两块气动夹爪固定板212之间(气动夹爪211用于夹取托盘103上的电机壳,选用市售的af30-50型号的即可)。充磁铁芯固定板213通过螺丝固定在两块气动夹爪固定板212的底部。充磁铁芯214固定在充磁铁芯固定板213的底部,且与气动夹爪211相配合使用(如图5、6所示,充磁铁芯214处在气动夹爪211的两个夹持臂之间;在实际情况下,输送带102与托盘103输送至支撑组件2下方时,触碰到托盘定位器104而停止运动,然后升降气缸205下降,固定在充磁铁芯固定板213底部的充磁铁芯214插入电机壳内,固定在翻转板210底部的气动夹爪211靠拢,将托盘103上的电机壳夹住,升降气缸205复位,在旋转气缸209的带动下运至充磁组件3进行充磁)。
32.如图7、8所示为充磁组件3的结构示意图,它用于对支撑组件2夹取的电机壳进行充磁,它包括第二支撑柱301、支撑板302、铁芯框303、铁芯框支柱304、高度座305、定位座
306、封装盒307、接线端子盒308、通电线圈309和定位夹爪310。第二支撑柱301有多根,它们固定在机台上,支撑板302固定在第二支撑柱301的顶部(支撑板302通过螺丝紧固的方式实现固定)。铁芯框支柱304有四根,它们固定在支撑板302的顶部,铁芯框303固定在四根铁芯框支柱304的顶部(铁芯框303呈“凹”字形)。封装盒307有两个,它们固定在支撑板302的顶部且位于“凹”字形的铁芯框303内侧(如图8所示)。高度座305固定在支撑板302上,定位座306固定在高度座305的顶部(高度座305和定位座306均位于两个封装盒307之间;在本实施例中,定位座306的顶部开设有与电机壳相配合的凹槽,用于放置气动夹爪211夹取的电机壳)。定位夹爪310有两个,它们固定在两个封装盒307的相向一侧(如图8所示,两个定位夹爪310的相向一侧开设有弧形部,两个弧形部围成一个圆,当气动夹爪211夹取待充磁的电机壳放置在定位座306上,两个定位夹爪310刚好位于电机壳的两侧,用于对电机壳进行定位)。接线端子盒308固定在支撑板302上,通电线圈309穿设在两个封装盒307内且与接线端子盒308相连(接线端子盒308与外界的电源相连,用于将外界的交流电转换为直流电,保证通电线圈309内的电流为直流电,在通电线圈309中通入恒流的直流电,使通电线圈309周围产生恒定磁场,使得放置在定位座306内的电机壳处在该磁场中,进而对电机壳内的磁瓦进行充磁)。
33.上述实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
