1.本发明涉及计算机算法技术领域,尤其涉及基于自监督的异常检测算法。
背景技术:
2.现代工业的复杂性常常会导致对问题认识的局限性。通常会面临可以明确定义正常模式,但无法定义大量可能存在的潜在异常模式。因此,如何定义且区分目标样本成为学术界与工业界关注的热点。异常检测问题近来吸引了许多领域的目光,包括:医学检测,视频检测,欺诈检测,入侵检测等等。目前大部分学者对异常检测问题的研究专注点主要集中在深度学习方法上。例如:采用对抗生成模型,其目的是学习目标样本精确的数据分布。此外还有探讨了核方法与深度神经网络相结合的可能性,利用深层网络作为特征提取器并使用核方法作为分类器。
3.但是现有技术均是基于无监督学习背景下提出,这意味以往的的技术都会存在缺乏先验信息。
技术实现要素:
4.1.要解决的技术问题
5.本发明的目的是为了解决现有技术中均是基于无监督学习背景下提出,这意味以往的的技术都会存在缺乏先验信息的问题,而提出的基于自监督的异常检测算法。
6.2.技术方案
7.为了实现上述目的,本发明采用了如下技术方案:
8.基于自监督的异常检测算法,包括以下步骤:
9.步骤1:自监督数据准备;对原始数据集数据进行重写,原数据通过旋转90,180,270度,将数据集扩增至原始数据集的三倍,同时将原始数据集的类别标签转换成旋转角度标签;
10.步骤2:特征抽取及重构;将第一步获取的数据集传入深度卷积自编码器,由encoder编码器和decoder解码器组成,encoder表示特征抽取,decoder表示特征重构,网络骨干是wideresnet 40-4网络;
11.步骤3:基于自监督的对抗训练;对抗训练主要由gan模型完成,(2)中深度卷机自编码器表示生成器,d表示鉴别器,这里的鉴别器d与传统鉴别器只鉴别输入数据和生成数据的真假不同,d不仅需要鉴别真假生成数据,还需要鉴别伪数据以及预测分类四个角度的输入数据步骤;
12.步骤4:异常评分;异常评分模块主要由分类误差和重构误差组成,分类误差表示分类四个角度数据产生的误差;重构误差表示重构四个角度数据产生的误差。
13.优选地,所述步骤1中对原始数据集数据进行重写,原数据通过旋转0,90,180,270度,将数据集扩增至原始数据集的三倍,同时将原始数据集的类别标签转换成旋转角度标签(0,1,2,3)并且默认旋转图为正类图片,标签是0,以往的异常检测通常不会对数据进行
数据增广,采用的标签也是原数据集的类别标签。
14.优选地,所述步骤1中:
15.具体的自监督数据可表示为d
normal
={(x1,y1),(x2,y2),...,(xm,ym)},
16.伪异常生成器数据可表示为d
abnormal
={(x1,y1),(x2,y2),...,(xn,yn)},
17.m,n分别代表样本个数,x∈rd,yi={(c,r)|c∈{01,},r∈{0,1,2,3}},c表示类别标签(0表示自监督数据,即正类数据,1表示伪异常生成器数据,即异类数据),r表示旋转角度标签(0,1,2,3分别表示旋转0,90,180,270度),m>>n。
18.优选地,所述步骤2中将步骤1中获取的数据集传入生成器,利用深度卷积自编码器充当生成器,由encoder编码器和decoder解码器组成,encoder表示特征抽取,decoder表示特征重构,网络骨干wideresnet 40-4网络,生成器的损失函数主要是l1重构损;
[0019]19.表示经过解码器生成的数据。
[0020]
优选地,所述步骤3中对抗训练主要由gan模型(gan:生成对抗模型)完成,在步骤2中阐述深度卷机自编码器表示生成器,d表示鉴别器,这里的鉴别器d与传统鉴别器只鉴别输入数据和生成数据的真假不同,d不仅需要鉴别真假生成数据,还需要鉴别伪数据以及预测分类四个角度的输入数据。
[0021]
优选地,所述步骤3中模块中还加入了伪数据生成器,伪数据生成器的构造流程是随机从数据集中选取两张没有经过旋转变换的原图,进行随机patch裁剪拼接成标准尺寸后作为伪数据(标签是1)传入鉴别器;
[0022]
标准的对抗损失:
[0023]
优选地,所述步骤4中异常评分模块主要由分类误差和重构误差组成,分类误差表示分类四个角度数据产生的误差;重构误差表示重构四个角度数据产生的误差。
[0024]
优选地,还包括方案测试阶段,所述方案测试阶段不需要伪异常生成器,只需要生成器和鉴别器,将输入数据进行随机角度变换后传入生成器获得重构损失,传入鉴别器获得分类损失,将两个损失进行相加后与异常阈值进行对比,高于阈值说明是异常输入,低于阈值说明是正常输入。
[0025]
3.有益效果
[0026]
相比于现有技术,本发明的优点在于:
[0027]
(1)本发明中,首先利用自监督学习可以实现数据增广,弥补以往技术中数据稀缺的不足;其次自监督学习将以往技术学习区分图像本身的特征转换成区分图像的变换,这说明自监督学习可以更关注图像的语义特征。
[0028]
(2)本发明中,方案增加了伪异常生成器模块,该模块可以产生大量的异常图像,这就将原本无监督学习异常检测问题转换成了监督学习异常检测问题,可以有效的改善以往技术中的鉴别器不认识异常的不足。
附图说明
[0029]
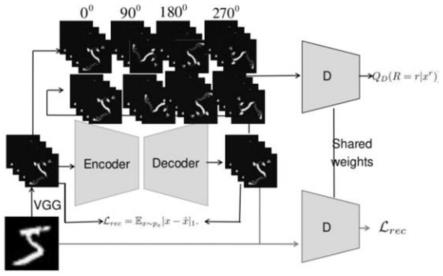
图1为本发明提出的基于自监督的异常检测算法的研究方案示意图。
具体实施方式
[0030]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0031]
实施例1:
[0032]
参照图1,基于自监督的异常检测算法,包括以下步骤:
[0033]
步骤1:自监督数据准备;对原始数据集数据进行重写,原数据通过旋转90,180,270度,将数据集扩增至原始数据集的三倍,同时将原始数据集的类别标签转换成旋转角度标签,所述步骤1中对原始数据集数据进行重写,原数据通过旋转0,90,180,270度,将数据集扩增至原始数据集的三倍,同时将原始数据集的类别标签转换成旋转角度标签(0,1,2,3)并且默认旋转图为正类图片,标签是0,以往的异常检测通常不会对数据进行数据增广,采用的标签也是原数据集的类别标签,所述步骤1中:
[0034]
具体的自监督数据可表示为d
normal
={(x1,y1),(x2,y2),...,(xm,ym)},
[0035]
伪异常生成器数据可表示为d
abnormal
={(x1,y1),(x2,y2),...,(xn,yn)},
[0036]
m,n分别代表样本个数,x∈rd,yi={(c,,)|c∈{0,1,},r∈{0,1,2,3}},c表示类别标签(0表示自监督数据,即正类数据,1表示伪异常生成器数据,即异类数据),r表示旋转角度标签(0,1,2,3分别表示旋转0,90,180,270度),m>>n;
[0037]
步骤2:特征抽取及重构;将第一步获取的数据集传入深度卷积自编码器,由encoder编码器和decoder解码器组成,encoder表示特征抽取,decoder表示特征重构,网络骨干是wideresnet 40-4网络,所述步骤2中将步骤1中获取的数据集传入生成器,利用深度卷积自编码器充当生成器,由encoder编码器和decoder解码器组成,encoder表示特征抽取,decoder表示特征重构,网络骨干wideresnet40-4网络,生成器的损失函数主要是l1重构损;
[0038]038]
表示经过解码器生成的数据;
[0039]
步骤3:基于自监督的对抗训练;对抗训练主要由gan模型完成,(2)中深度卷机自编码器表示生成器,d表示鉴别器,这里的鉴别器d与传统鉴别器只鉴别输入数据和生成数据的真假不同,d不仅需要鉴别真假生成数据,还需要鉴别伪数据以及预测分类四个角度的输入数据步骤,所述步骤3中对抗训练主要由gan模型(gan:生成对抗模型)完成,在步骤2中阐述深度卷机自编码器表示生成器,d表示鉴别器,这里的鉴别器d与传统鉴别器只鉴别输入数据和生成数据的真假不同,d不仅需要鉴别真假生成数据,还需要鉴别伪数据以及预测分类四个角度的输入数据,所述步骤3中模块中还加入了伪数据生成器,伪数据生成器的构造流程是随机从数据集中选取两张没有经过旋转变换的原图,进行随机patch裁剪拼接成标准尺寸后作为伪数据(标签是1)传入鉴别器;
[0040]
标准的对抗损失:
[0041]
步骤4:异常评分;异常评分模块主要由分类误差和重构误差组成,分类误差表示分类四个角度数据产生的误差;重构误差表示重构四个角度数据产生的误差,所述步骤4中异常评分模块主要由分类误差和重构误差组成,分类误差表示分类四个角度数据产生的误差;重构误差表示重构四个角度数据产生的误差;
[0042]
本发明中,还包括方案测试阶段,所述方案测试阶段不需要伪异常生成器,只需要
生成器和鉴别器,将输入数据进行随机角度变换后传入生成器获得重构损失,传入鉴别器获得分类损失,将两个损失进行相加后与异常阈值进行对比,高于阈值说明是异常输入,低于阈值说明是正常输入。
[0043]
本发明中,首先利用自监督学习可以实现数据增广,弥补以往技术中数据稀缺的不足;其次自监督学习将以往技术学习区分图像本身的特征转换成区分图像的变换,这说明自监督学习可以更关注图像的语义特征。
[0044]
本发明中,方案增加了伪异常生成器模块,该模块可以产生大量的异常图像,这就将原本无监督学习异常检测问题转换成了监督学习异常检测问题,可以有效的改善以往技术中的鉴别器不认识异常的不足。
[0045]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。