1.本发明涉及遥感影像质量评价领域,具体涉及一种面向可用性的遥感影像质量评价方法。
背景技术:
2.遥感影像质量评价是设计和评估遥感卫星数据传输系统的有效工具,遥感影像质量的优劣直接影响其后续产品生产及其质量。然而由于复杂的成像环境和噪声的影响,初始的遥感影像都不可避免地存在失真和各种程度的退化,遥感影像是否可用、可用性程度如何对于后续的处理和应用产生了很大的影响。
3.目前,遥感影像质量评价通常针对从图像本身进行质量评价,如均方差、峰值信噪比等基于误差统计量的评价方法,以及基于hvs特性的评价方法,这些质量评价方法所使用的评价指标、评价算法很难将其与遥感影像可用性需求建立起有效联系,服务与遥感影像可用性的质量评价方法亟需建立。
技术实现要素:
4.针对当前遥感影像可用性质量评价方法缺失问题,本发明提出一种面向可用性的遥感影像质量评价方法,通过构建影像可用性质量指标,建立影像可用性质量分数计算方法和等级评定方法,实现对遥感影像可用性的定量和定性的质量评价。
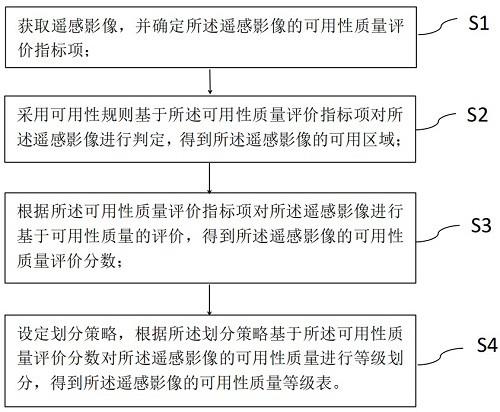
5.本发明提供一种面向可用性的遥感影像质量评价方法,所述方法包括:s1获取遥感影像,并确定所述遥感影像的可用性质量评价指标项;s2采用可用性规则基于所述可用性质量评价指标项对所述遥感影像进行判定,得到所述遥感影像的可用区域;s3根据所述可用性质量评价指标项对所述遥感影像进行基于可用性质量的评价,得到所述遥感影像的可用性质量评价分数;s4设定划分策略,根据所述划分策略基于所述可用性质量评价分数对所述遥感影像的可用性质量进行等级划分,得到所述遥感影像的可用性质量等级表。
6.于本发明一具体实施例中,所述可用性质量评价指标项包括原始文件损失、原始文件缺失、云量、阴影、条带异常、空值、高曝光、直方图异常、波段一致性、波段匹配性、侧视角、内部错位畸变和光谱错位。
7.于本发明一具体实施例中,步骤s2包括:s21将所述可用性质量评价指标项分为第一类指标项、第二类指标项、第三类指标项和第四类指标项;其中,所述第一类指标项包括所述原始文件损失、所述原始文件缺失、所述直方图异常、所述波段一致性、所述波段匹配性、所述内部错位畸变,所述第二类指标项包括所述侧视角,所述第三类指标项包括所述光谱错位,所述第四类指标项包括所述云量、所述阴影、所述条带异常、所述高曝光和所述空值;
s22针对所述第一类指标项、第二类指标项、第三类指标项和第四类指标项分别设定第一类规则、第二类规则、第三类规则和第四类规则,其中,第一类规则、第二类规则、第三类规则和第四类规则组成所述可用性规则;s23基于所述可用性质量评价指标项对所述遥感影像的区域进行判定:根据所述第一类规则对所述遥感影像进行所述第一类指标项的可用性判定,得到各个第一类指标项的可用区域,所述第一类指标项的可用区域为0或所述遥感影像的全部区域;根据所述第二类规则对所述遥感影像进行所述第二类指标项的可用性判定,得到各个第二类指标项的可用区域,所述第二类指标项的可用区域为0或所述遥感影像的全部区域;根据所述第三类规则对所述遥感影像进行所述第三类指标项的可用性判定,得到各个第三类指标项的可用区域,所述第三类指标项的可用区域为所述遥感影像的全部区域;根据所述第四类规则对所述遥感影像进行所述第四类指标项的可用性判定,得到各个第四类指标项的可用区域,所述第四类指标项的可用区域为所述遥感影像中的一个或多个可用影像块;其中,所述第一类指标项的可用区域、所述第二类指标项的可用区域、所述第三类指标项的可用区域和所述第四类指标项的可用区域组成指标项可用区域;s24对所述指标项可用区域求交集得到所述遥感影像的可用区域;对应的,步骤s3包括:s31对所有的所述可用性质量评价指标项进行评价,得到指标项可用性质量评价分数;s32综合计算多个所述指标项可用性质量评价分数,得到遥感影像的可用性质量评价分数。
8.于本发明一具体实施例中,步骤s23包括:s231所述第一类规则的判定过程为:设定可用性条件,若所述第一类指标项达到所述可用性条件,则所述第一类指标项的可用区域为所述遥感影像的全部区域;若所述第一类指标项未达到所述可用性条件,则所述第一类指标项的可用区域为0;s232所述第二类规则的判定过程为:设置指标阈值,当所述第二类指标项达到所述指标阈值,则所述第二类指标项的可用区域为0;当所述第二类指标项未达到所述指标阈值,则所述第二类指标项的可用区域为所述遥感影像的全部区域;s233所述第三类规则的判定过程为:所述第三类指标项的可用区域为所述遥感影像的全部区域;s234所述第四类规则的判定过程为:根据所述第四类指标项的检测方法对所述遥感影像进行检测,得到所述第四类指
标项的占比区域,所述遥感影像的全部区域与所述第四类指标项的占比区域之间的区域差为所述第四类指标项的可用区域,其中,所述区域差为一个或多个可用影像块。
9.于本发明一具体实施例中,步骤s31包括:s311对所述第一类指标项进行评价,得到所述第一类指标项的评价分数,所述第一类指标项的评价分数包括0和100两项;s312对所述第二类指标项进行评价,得到所述第二类指标项的评价分数,所述第二类指标项的评价分数为第一数值,所述第一数值的范围为[0,100],所述第二类指标项的评价分数通过对应的第二类指标项的检测方法进行检测并计算得到;s313对所述第三类指标项进行评价,得到所述第三类指标项的评价分数,所述第三类指标项的评价分数为第二数值,所述第二数值的范围为[0,100],所述第三类指标项的评价分数通过对应的第三类指标项的检测方法进行检测并计算得到;s314对所述第四类指标项进行评价,得到所述第四类指标项的评价分数,所述第四类指标项的评价分数为第三数值,所述第三数值的范围为[0,100],所述第四类指标项的评价分数通过对应的第四类指标项的检测方法进行检测并计算得到;其中,所述第一类指标项的评价分数、所述第二类指标项的评价分数、所述第三类指标项的评价分数和所述第四类指标项的评价分数组成所述指标项可用性质量评价分数。
[0010]
于本发明一具体实施例中,步骤s32包括:s321若任一所述指标项可用性质量评价分数为0,则所述遥感影像的可用性质量评价分数为0;s322设定面积阈值,若任一所述指标项可用区域的面积小于面积阈值,则所述遥感影像的可用性质量评价分数为0;s323若任一所述指标项可用性质量评价分数大于0,同时任一所述指标项可用区域的面积大于面积阈值,对所述指标项可用性质量评价分数进行整体计算,得到所述遥感影像的可用性质量评价分数。
[0011]
于本发明一具体实施例中,步骤323中,所述对所述指标项可用性质量评价分数进行整体计算,得到所述遥感影像的可用性质量评价分数包括:对所述可用性质量评价指标项建立主观权重系数,所有的所述可用性质量评价指标项的权重系数之和为1,所述主观权重系数的建立方法包括delphi法、ahp法和专家评分法;将所述指标项可用性质量评价分数和对应的权重系数相乘后求和,得到所述遥感影像的可用性质量评价分数。
[0012]
于本发明一具体实施例中,所述划分策略为:设置多个预设阈值,将所述多个预设阈值按照从大到小排序,每两个阈值之间形成阈值区间,并对每个所述阈值区间设置质量等级;将所述遥感影像的可用性质量评价分数与所述阈值区间进行比对,对所述遥感影像的可用性质量评价分数进行质量等级的评定。
[0013]
于本发明一具体实施例中,步骤s313包括:通过计算所述遥感影像的特征点匹配率,选择最小的所述特征点匹配率,将所述特征点匹配率换算为0到100,得到所述光谱错位的评价分数,即所述第三类指标项的评价
分数。
[0014]
于本发明一具体实施例中,步骤s314包括:将所述云量、所述阴影、所述条带异常、所述高曝光、所述空值的面积,同所述遥感影像的面积相比,分别获取所述云量、所述阴影、所述条带异常、所述高曝光、所述空值的影像占比数值,将所述影像占比数值换算为0到100,分别得到所述云量、所述阴影、所述条带异常、所述高曝光、所述空值的评价分数,所述云量、所述阴影、所述条带异常、所述高曝光、所述空值的评价分数组成所述第四类指标项的评价分数。
[0015]
本发明的有益效果为:本发明面向遥感影像的可用性质量检测,给出可用于遥感影像可用性质检的质量指标以及各质量指标的可用性质量数值和可用域计算方法,设计了遥感影像可用性质量评价分数的计算方法,不仅明确了遥感影像的可用性区域,同时给出遥感影像可用性质量分数,从而可对遥感影像的可用性质量进行定性和定量评估,服务于遥感影像高质量应用。
附图说明
[0016]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0017]
图1为本发明提供的一种面向可用性的遥感影像质量评价方法的流程图。
具体实施方式
[0018]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
[0019]
图1所示为本发明提供的一种面向可用性的遥感影像质量评价方法的流程图,相对于目前遥感影像质量评价方法主要针对图像本身的信息熵、信噪比等物理质量以及基于视觉感知的图像质量方法,本发明专利针对遥感影像可用性来构建遥感影像可用性质量评价方法,具体包括如下步骤:s1获取遥感影像,并确定所述遥感影像的可用性质量评价指标项。
[0020]
遥感影像是指记录各种地物电磁波大小的胶片或照片,主要分为航空遥感影像和航天遥感影像。根据搭载的传感器不同,遥感影像可分为光学遥感影像、高光谱遥感影像、sar遥感影像;根据处理情况,遥感影像分为原始遥感影像、遥感影像产品。本实例中,选定光学原始遥感影像作为获取的遥感影像。
[0021]
在本发明一实施例中,遥感影像可用性质量评价指标项可以包括原始文件损失、原始文件缺失、云量、阴影、条带异常、空值、高曝光、直方图异常、波段一致性、波段匹配性、侧视角、内部错位畸变和光谱错位。
[0022]
s2采用可用性规则基于所述可用性质量评价指标项对所述遥感影像进行判定,得到所述遥感影像的可用区域。
[0023]
具体地:s21将所述可用性质量评价指标项分为第一类指标项、第二类指标项、第三类指标项和第四类指标项。
[0024]
所述第一类指标项包括所述原始文件损失、所述原始文件缺失、所述直方图异常、所述波段一致性、所述波段匹配性、所述内部错位畸变。
[0025]
所述第二类指标项包括所述侧视角。
[0026]
所述第三类指标项包括所述光谱错位。
[0027]
所述第四类指标项包括所述云量、所述阴影、所述条带异常、所述高曝光和所述空值。
[0028]
s22针对所述第一类指标项、第二类指标项、第三类指标项和第四类指标项分别设定第一类规则、第二类规则、第三类规则和第四类规则,其中,第一类规则、第二类规则、第三类规则和第四类规则组成所述可用性规则。
[0029]
s23基于所述可用性质量评价指标项对所述遥感影像的区域进行判定:根据所述第一类规则对所述遥感影像进行所述第一类指标项的可用性判定,得到各个第一类指标项的可用区域,所述第一类指标项的可用区域为0或所述遥感影像的全部区域;根据所述第二类规则对所述遥感影像进行所述第二类指标项的可用性判定,得到各个第二类指标项的可用区域,所述第二类指标项的可用区域为0或所述遥感影像的全部区域;根据所述第三类规则对所述遥感影像进行所述第三类指标项的可用性判定,得到各个第三类指标项的可用区域,所述第三类指标项的可用区域为所述遥感影像的全部区域;根据所述第四类规则对所述遥感影像进行所述第四类指标项的可用性判定,得到各个第四类指标项的可用区域,所述第四类指标项的可用区域为所述遥感影像中的一个或多个可用影像块;其中,所述第一类指标项的可用区域、所述第二类指标项的可用区域、所述第三类指标项的可用区域和所述第四类指标项的可用区域组成指标项可用区域。
[0030]
具体地,在本发明一实施例中,步骤s23包括:s231所述第一类规则的判定过程为:设定可用性条件,若所述第一类指标项达到所述可用性条件,则所述第一类指标项的可用区域为所述遥感影像的全部区域;若所述第一类指标项未达到所述可用性条件,则所述第一类指标项的可用区域为0。
[0031]
具体地,所述第一类指标项包括所述原始文件损失、所述原始文件缺失、所述直方图异常、所述波段一致性、所述波段匹配性、所述内部错位畸变。
[0032]
以具体实施例进行说明:所述原始文件损失中,所述可用性条件为各原始文件可打开、文件属性和文件命名无误,若所述原始文件损失在进行可用性判定时,达到所述可用性条件,则所述原始文件损失的可用区域为所述遥感影像的全部区域,否则,所述原始文件损失的可用区域为0。
[0033]
所述原始文件缺失中,所述可用性条件为文件结构校验、文件组成校验全通过,若所述原始文件缺失在进行可用性判定时,达到所述可用性条件,则所述原始文件缺失的可用区域为所述遥感影像的全部区域,否则,所述原始文件缺失的可用区域为0。
[0034]
所述直方图异常中,所述可用性条件为所述遥感影像的直方图检测结果为各个波段的标准差均小于对应的均值,若所述直方图异常在进行可用性判定时,达到所述可用性条件,则所述直方图异常的可用区域为所述遥感影像的全部区域,否则,所述直方图异常的可用区域为0。
[0035]
所述波段一致性中,所述可用性条件为所述遥感影像的各波段的重合程度达到重合要求,若所述波段一致性在进行可用性判定时,达到所述可用性条件,则所述波段一致性的可用区域为所述遥感影像的全部区域,否则,所述波段一致性的可用区域为0。
[0036]
所述波段匹配性中,所述可用性条件为所述遥感影像的波段数量符合波段要求,若所述波段匹配性在进行可用性判定时,达到所述可用性条件,则所述波段匹配性的可用区域为所述遥感影像的全部区域,否则,所述波段匹配性的可用区域为0。
[0037]
所述内部错位畸变中,所述可用性条件为所述遥感影像的畸变值小于或等于畸变阈值,若所述内部错位畸变在进行可用性判定时,达到所述可用性条件,则所述内部错位畸变的可用区域为所述遥感影像的全部区域,否则,所述内部错位畸变的可用区域为0。
[0038]
s232所述第二类规则的判定过程为:设置指标阈值,当所述第二类指标项达到所述指标阈值,则所述第二类指标项的可用区域为0;当所述第二类指标项未达到所述指标阈值,则所述第二类指标项的可用区域为所述遥感影像的全部区域。
[0039]
具体地,所述第二类指标项包括所述侧视角。
[0040]
以具体实施例进行说明:所述侧视角利用指标阈值在[0
°
,90
°
]范围划分为多个侧视角数值域,每一个所述侧视角数值域对应一个侧视角指标分数f,当所述侧视角达到所述指标阈值时,所述侧视角指标分数f为0,所述侧视角的可用区域为0;当所述第二类指标项未达到所述指标阈值,所述侧视角指标分数f大于0,所述侧视角的可用区域为所述遥感影像的全部区域。
[0041]
例如,所述指标阈值为α
t
,所述侧视角在[0
°
,90
°
]范围划分为[0
°
,α
t
/2)、[α
t
/2,α
t
)、[α
t
,90
°
],每个范围对应的侧视角指标分数f为100、70、0。
[0042]
当所述侧视角θ≥α
t
,侧视角指标分数f为0,所述侧视角的可用区域为0。
[0043]
当所述侧视角θ《α
t
,侧视角指标分数f大于0,所述侧视角的可用区域为所述遥感影像的全部区域。
[0044]
s233所述第三类规则的判定过程为:所述第三类指标项的可用区域为所述遥感影像的全部区域。
[0045]
具体地,所述第三类指标项包括所述光谱错位。即在检测所述遥感影像的光谱错位时,对应的光谱错位的可用区域为所述遥感影像的全部区域。
[0046]
s234所述第四类规则的判定过程为:根据所述第四类指标项的检测方法对所述遥感影像进行检测,得到所述第四类指标项的占比区域,所述遥感影像的全部区域与所述第四类指标项的占比区域之间的区域差
为所述第四类指标项的可用区域,其中,所述区域差为一个或多个可用影像块。
[0047]
具体地,所述第四类指标项包括所述云量、所述阴影、所述条带异常、所述高曝光和所述空值。
[0048]
以具体实施例进行说明:一、云量的可用区域首先,提取遥感影像中的厚云和薄云。可以采用传统机器学习和深度学习方法对遥感影像中的厚云和薄云进行提取。本实施例中采用深度学习的语义分割模型dlinknet进行厚云和薄云提取。
[0049]
然后,进行云量的可用区域的提取。在遥感影像上,去除掉提取的厚云和薄云,得到云量的可用区域,所述云量的可用区域可以是一个或者多个可用影像块。
[0050]
进一步的,可以对所述云量的可用区域进行滤波、小空洞填充等后处理,得到优化的所述云量的可用区域。
[0051]
二、阴影的可用区域首先,通过阴影检测的方法提取得到遥感影像中的阴影部分。所述阴影检测的方法可以是基于模型的方法、基于特征的方法或阴影指数方法等。
[0052]
然后,在所述遥感影像上,去除提取的阴影部分,得到阴影的可用区域,所述阴影的可用区域可以是一个或者多个可用影像块。
[0053]
进一步的,对所述阴影的可用区域进行滤波、小空洞填充等后处理,得到优化的所述阴影的可用区域。
[0054]
三、条带异常的可用区域首先,利用条带检测的方法对所述遥感影像进行条带检测,得到条带异常区域。条带检测的方法可以是基于滤波器的方法。
[0055]
然后,在所述遥感影像上,去除条带异常的区域,得到条带异常的可用区域,所述条带异常的可用区域可以是一个或者多个可用影像块。
[0056]
四、高曝光的可用区域通过滑动窗口的方式在所述遥感影像上进行检测,计算每个所述滑动窗口的亮度值,从所述滑动窗口中筛选所有亮度值大于第一阈值的像素块,作为像素集,所述像素集为高曝光部分。
[0057]
在所述遥感影像上,去除高曝光的区域,得到高曝光的可用区域,所述高曝光的可用区域可以是一个或者多个可用影像块。
[0058]
五、空值的可用区域首先,利用空值检测的方法对所述遥感影像进行空值检测,得到空值检测的缺陷区域。所述空值检测的方法可以是像元亮度检测法。
[0059]
然后,在所述遥感影像上,去除所述空值检测的缺陷区域,得到空值的可用区域,所述空值的可用区域可以是一个或者多个可用影像块。
[0060]
需要说明的是,上述所述的原始文件损失的可用区域、原始文件缺失的可用区域、直方图异常的可用区域、波段一致性的可用区域、波段匹配性的可用区域、内部错位畸变的可用区域包含于所述第一类指标项的可用区域;上述所述的侧视角的可用区域包含于所述第二类指标项的可用区域;上述所述的光谱错位的可用区域和高曝光的可用区域包含于所
述第三类指标项的可用区域;上述所述的云量的可用区域、阴影的可用区域、条带异常的可用区域、空值的可用区域包含于所述第四类指标项的可用区域。
[0061]
需要明确的是,上述所述的所述第一类指标项的可用区域、所述第二类指标项的可用区域、所述第三类指标项的可用区域和所述第四类指标项的可用区域组成指标项可用区域,指的是,原始文件损失的可用区域、原始文件缺失的可用区域、直方图异常的可用区域、波段一致性的可用区域、波段匹配性的可用区域、内部错位畸变的可用区域、侧视角的可用区域、光谱错位的可用区域、高曝光的可用区域、云量的可用区域、阴影的可用区域、条带异常的可用区域、空值的可用区域包含于所述指标项可用区域。
[0062]
s24对所述指标项可用区域求交集得到所述遥感影像的可用区域。
[0063]
具体地,本发明一实施例中指的是对所有的指标项的可用区域求交集,即对原始文件损失的可用区域、原始文件缺失的可用区域、直方图异常的可用区域、波段一致性的可用区域、波段匹配性的可用区域、内部错位畸变的可用区域、侧视角的可用区域、光谱错位的可用区域、高曝光的可用区域、云量的可用区域、阴影的可用区域、条带异常的可用区域、空值的可用区域全部求交集,得到的最后的可用区域即为所述遥感影像的可用区域。
[0064]
s3:根据所述可用性质量评价指标项对所述遥感影像进行基于可用性质量的评价,得到所述遥感影像的可用性质量评价分数。
[0065]
具体地:s31对所有的所述可用性质量评价指标项进行评价,得到指标项可用性质量评价分数。
[0066]
在本发明一实施例中,步骤s31具体包括:s311对所述第一类指标项进行评价,得到所述第一类指标项的评价分数,所述第一类指标项的评价分数包括0和100两项。
[0067]
具体地,所述第一类指标项包括所述原始文件损失、所述原始文件缺失、所述直方图异常、所述波段一致性、所述波段匹配性、所述内部错位畸变。以具体实施例进行说明:(1)原始文件损失检测包括原始数据损坏检测、多光谱/全色数据损坏检测、rpc文件损坏检测、xml文件损坏检测。若出现文件无法打开、文件属性和文件命名有误,则原始文件损失,原始文件损失的评价分数为0。若各原始文件可打开、文件属性和文件命名无误,则原始文件无损失,原始文件损失的评价分数为100。
[0068]
(2)原始文件缺失检测包括文件结构校验、文件组成校验,对原始数据、多光谱/全色数据文件、rpc文件、xml文件是否缺失、文件结构是满足标准要求进行检测。若文件结构校验、文件组成校验任何一项未通过,则原始文件缺失,原始文件缺失的评价分数为0。若文件结构校验、文件组成校验全通过,则原始文件无缺失,原始文件缺失的评价分数为100。
[0069]
(3)对所述遥感影像进行预处理,得到预处理后的遥感影像。计算所述预处理后遥感影像的蓝波段的标准差sd(b)和均值m(b)、绿波段的标准差sd(g)和均值m(g)、红波段的标准差sd(r)和均值m(r)、近红外波段的标准差sd(nr)和均值m(nr)。如果sd(b)小于均值m(b)、且sd(g)小于均值m(g)、且sd(r)小于均值m(r)、且sd(nr)小于均值m(nr),则直方图异常的评价分数为100,否则直方图异常的评价分数为0。
[0070]
(4)波段一致性是指为各波段的重合程度。计算其评价分数的一具体实施例如下:计算所述遥感影像的全色波段影像和多光谱波段影像的交并比:
其中,i
bd
为遥感影像的全色波段影像和多光谱波段影像的交并比,s1∩s2为全色影像面积和多光谱影像面积的交集,s1∪s2为全色影像面积和多光谱影像面积的交集。
[0071]
若i
bd
小于或等于数值r
bd
,则波段一致性的可用性质量评价分数为100;若i
bd
大于数值r
bd
,则波段一致性的可用性质量评价分数为0。本实施例中,r
bd
取值0.1。
[0072]
(5)波段匹配性指的是遥感影像的波段数量是否符合要求、是否有缺失。计算其评价分数的一具体实施例如下:读取所述遥感影像的全色光谱波段个数n1和多光谱波段个数n2;如果n1《1,n2《4,波段匹配的评价分数为100;如果n1=1,n2=4,则波段匹配的评价分数为0。
[0073]
(6)计算内部错位畸变的评价分数的一具体实施例如下:根据时间和分辨率,获得所述遥感影像i1的无偏差的标准遥感影像i2。
[0074]
在i1和i2上分别提取特征点,并通过均匀化选择得到i1的特征点集合st1、i2的特征点集合st2。
[0075]
对st1和st2进行特定点匹配匹配,得到匹配点对。
[0076]
利用匹配点对建立仿射变换模型,利用所述变换模型将st1进行仿射变换得到仿射特征点st
12
。
[0077]
利用欧式距离计算st
12
和st2所有同名特征点的距离,并将最大距离作为i1的畸变值。
[0078]
根据经验设定一阈值,若所述畸变值大于该阈值,则内部错位畸变的可用性质量评价分数为0;若所述畸变值小于或等于该阈值,则内部错位畸变的可用性质量评价分数为100。
[0079]
s312对所述第二类指标项进行评价,得到所述第二类指标项的评价分数,所述第二类指标项的评价分数为第一数值,所述第一数值的范围为[0,100],所述第二类指标项的评价分数通过对应的第二类指标项的检测方法进行检测并计算得到。
[0080]
具体地,所述第二类指标项包括所述侧视角。以具体实施例进行说明:为了缩短卫星影像在地面的覆盖周期、提高卫星数据获取能力,目前在轨运行的高分辨率卫星都具有侧视成像的能力。侧视成像在提高卫星成像能力的同时,也降低卫星影像的质量,包括空间分辨率的退化、定位能力降低等现象,特别是随着侧视角增加会使地形起伏引起的像点误差增大,因此侧视角对遥感影像的可用性有着直接影响。
[0081]
侧视角的可用性质量评价分数计算方法为:计算测试角,所述侧视角利用多个所述指标阈值在[0
°
,90
°
]范围划分为多个侧视角数值域,每一个所述侧视角数值域对应一个侧视角指标分数f。
[0082]
a. 计算所述遥感影像的侧视角:其中,θ为侧视角,(xa、ya)为摄影中心和像点连线在三维空间(x-y-z)中z=0平面上的交点a的坐标,(xa′
、ya′
) 为摄影中心和像点连线在三维空间(x-y-z)中z=500平面上的交
点a
′
的坐标。(xa、ya)和(xa′
、ya′
)可基于有理函数模型(rpc)利用利用像点的像方坐标和对应高程值计算得到。
[0083]
b. 设置指标阈值α
t
,将[0
°
,90
°
]范围划分为[0
°
,α
t
/2)、[α
t
/2,α
t
)、[α
t
,90
°
],每个范围对应的侧视角指标分数f为100、70、0:如果θ≥α
t
,则侧视角的评价分数为0;如果θ《α
t
,侧视角的评价分数为:其中,ic是侧视角的评价分数。
[0084]
s313对所述第三类指标项进行评价,得到所述第三类指标项的评价分数,所述第三类指标项的评价分数为第二数值,所述第二数值的范围为[0,100],所述第三类指标项的评价分数通过对应的第三类指标项的检测方法进行检测并计算得到。
[0085]
具体地,所述第三类指标项包括所述光谱错位。以具体实施例进行说明:光谱错位通过计算各光谱影像的特征点匹配率,选择最小的所述特征点匹配率,将所述特征点匹配率换算为0到100,得到所述光谱错位的评价分数。
[0086]
下述步骤为光谱错位的评价分数计算的一具体实施例:a、采用特征提取算法,如surf算法分别在遥感影像的全色影像和多光谱影像上获取分布均匀且数量足够的特征点。
[0087]
得到全色影像和多光谱影像中每个像素点的hessian矩阵;计算全色影像中每个像素点的hessian矩阵行列式;特征点初步提取:当hessian矩阵行列式取得极大值时,认为当前点为候选特征点:将经过hessian矩阵处理过的每个像素点与其3维领域的26个点进行大小比较,如果它是这26个点中的最大值或者最小值,则保留下来作为候选特征点;特征点精提取:初步定位出候选特征点后,经过滤除能量比较弱的关键点以及错误定位的关键点,筛选出最终的稳定的特征点。
[0088]
b、对获取的特征点进行特征点匹配,得到第三候选特匹配点集。
[0089]
提取每个全色特征点的最短欧式距离对应的多光谱特征点,得到第一候选匹配点集;提取每个多光谱特征点的最短欧式距离对应的全色特征点,得到第二候选特匹配点集;提取距离互为最短的全色特征点和多光谱特征点,得到第三候选特匹配点集。
[0090]
c、判断两个特征点的hessian矩阵迹正负号,并将第三候选特匹配点集中hessian矩阵迹正负号相反的匹配点对剔除,得到匹配点对集合,其中,矩阵迹为矩阵特征值的和。
[0091]
d、计算全色影像和多光谱影像的匹配率:其中,α为全色影像和多光谱影像的匹配率,m为全色影像中特征点个数,n为多光谱影像中特征点个数,2k为匹配点个数,k为匹配点对的个数。
[0092]
e、将α换算为0到100,得到所述光谱错位的评价分数。
[0093]
s314对所述第四类指标项进行评价,得到所述第四类指标项的评价分数,所述第四类指标项的评价分数为第三数值,所述第三数值的范围为[0,100],所述第四类指标项的评价分数通过对应的第四类指标项的检测方法进行检测并计算得到。
[0094]
具体地,所述第四类指标项包括所述云量、所述阴影、所述条带异常和所述空值。以具体实施例进行说明:
①
、云量定义为遥感影像中云区域占整幅遥感影像的比例。然而在云量的评价分数的计算上,不仅要考虑云量占比,同时要考虑去云后的云量的可用区域的破碎度,即由于云分布的面积和地理位置导致的云量的可用区域内所包括的可用影像块的大小和数量,将直接影响遥感影像的可用性,本实施例中通过对云量的可用区域内的最大可用影像块的面积要求来衡量云量的可用区域的破碎度。
[0095]
本实施例中,云量的评价分数的具体计算过程如下:1)设定一个面积阈值r,若云量的可用区域的最大可用影像块面积小于r,则所述云量的评价分数为0,同时所述云量的可用区域也将调整为0。
[0096]
2)若云量的可用区域的最大可用影像块面积大于或等于r:可选的:首先,利用多个云量阈值将云量范围[0%,90%]划分为多个云量数值域,每一个数值区间对应一个云量指标分数。本实施例中设置了[0,5%]、(5%,10% ]、(10%,30% ]、(30%,50%]、(50%,70%]、(70%,100% ]这6个云量数值域,每个云量数值域对应的云量指标分数为100、90、75、60、50、30。
[0097]
然后,将提取的厚云和薄云面积除以所述遥感影像的面积,得到所述遥感影像的云量比值y,本实施例中y=12%,则所述云量的评价分数为90。
[0098]
可选的:将云量比值y直接换算为云量的评价分数:100-y
×
100,于本实施例中,所述云量的评价分数为88。
[0099]
②
、阴影定义为由于云层遮蔽,高层建筑物,数目,桥梁或高耸的塔楼产生的阴影。这些阴影会遮挡部分遥感信息,影响遥感影像的可用性,因此需要对阴影信息进行检测。
[0100]
阴影的评价分数计算步骤如下:阴影检测和获取本实施例选择阴影指数方法进行阴影检测:第一步:对遥感影像的蓝波段、绿波段和红波段的波段值进行归一化处理,使每个波段的波段值均在0-1之间,归一化计算具体见公式(5):其中,band_v表示波段的归一化结果值,value表示波段值,max(
·
)表示取最大值。
[0101]
第二步:利用归一化的波段值对图斑的阴影指数进行计算,阴影指数计算见公式(6):其中,usi表示表示阴影指数,band_v(b)、band_v(g)、band_v(r)分别表示蓝波段、
绿波段和红波段归一化后的波段值,abs(
·
)表示取绝对值。
[0102]
第三步:利用灰度阈值对阴影指数进行二值化,使得二值化后的阴影指数只有0和1;第四步:提取所有阴影指数为1的像素,获得阴影图斑s1,并将阴影图斑总面积除以整幅遥感总面积得到阴影检测的面积分数is:其中,is为阴影检测的面积分数,
ʃ
s1为阴影指数为1的阴影图斑总面积,s为遥感影像总面积。
[0103]
可选的:首先,利用多个阴影阈值将阴影比值范围[0%,90%]划分为多个阴影数值域,每一个阴影数值域对应一个阴影指标分数。本实施例中设置[0,5%]、(5%,20%]、(20%,40% ]、(40%,60%]、(60%,80%]、(80%,100%]这5个阴影数值域,每个阴影数值域对应的阴影指标分数为95、85、75、60、40、20。
[0104]
然后,将is对应到各个阴影数值域上,得到对应阴影数值域的阴影指标分数。本实施例中is=5%,则所述云量的评价分数为95。
[0105]
可选的:将is直接换算为云量的评价分数:100-is×
100,于本实施例中,所述云量的评价分数为95。
[0106]
③
、条带视觉上表现出一定的条带状,定义为行或列像素灰度值明显高于地域相邻位置的非条带像素灰度值。条带检测包含行条带检测和列条带检测,用于对条带异常信息进行输入。条带检测包括行条带检测方法和列条带检测方法,本实施例使用行条带检测方法进行条带检测:第一步:统计所述遥感影像所有波段的行均值:其中,vi为第i(i=1,2,...,nrows)行的像元亮度均值,x
(i,j)
为第i行,第j列的dn(像元亮度)值,nrows、ncols为影像的行数和列数。
[0107]
第二步:根据行均值vi绘制行均值-行数折线图,计算行均值梯度:其中,gradi为第i(i=1,2,...,nrows-1)行和第i 1行之间的均值梯度。
[0108]
第三步:将行均值梯度gradi做如下处理:a.当行均值梯度满足gradi≤t,表示该行无条带质量问题;b.当行均值梯度满足gradi》t,表示该行有条带质量问题,其位置信息为该行所对应的区域,记为r;条带异常分数为rii,其公式为:其中,rii是条带检测的条带异常分数,gradi(max)是行均值梯度最大值,gradi是
行均值梯度。本实例中,gradi=150,gradi(max)=200,那么此时rii=25。
[0109]
可选的:计算所有条带异常分数rii的平均值mrii,将所述平均值mrii作为条带异常的评价分数。
[0110]
可选的:计算所有条带异常分数的中位数merii,将所述中位数merii作为条带异常的评价分数。
[0111]
④
、高曝光为某像素或区域通常表现为亮度明显高于其他区域的情况。高曝光的评价分数的计算方法为:将上述所述像素集的面积求和后除以所述遥感影像的面积,得到所有遥感影像的高曝光比值,将所述高曝光比值换算为0到100,得到所述第四类指标项中所述高曝光的评价分数。
[0112]
下述步骤为高曝光的评价分数的计算方法的一具体实施例:使用12
×
12滑动窗口检测遥感影像的每个区域;计算每个区域的亮度均值:其中,v是滑动窗口内的亮度均值,x
(i,j)
是滑动窗口每个像素块的亮度值。
[0113]
对于v》200的像素块区域,保留这个12
×
12的像素块区域,从保留的区域中筛选出亮度值x
(i,j)
》250的像素块,并将其像素坐标归入像素坐标点集,得到像素集sb。其中,250为本实施例中所述第一阈值的取值。
[0114]
计算像素集的总面积占整幅遥感影像的总面积的比值:其中,ib为像素集的总面积占整幅遥感影像的总面积的比值,
ʃ
sb为像素集的总面积,s为遥感影像的总面积。
[0115]
将ib直接换算为高曝光的评价分数:100-ib×
100。
[0116]
⑤
、本实施例中使用像元亮度检测法,对所述遥感影像进行空值检测。
[0117]
第一步:获得遥感影像的蓝波段value(b)、绿波段value(g)和红波段value(r)的波段值。
[0118]
第二步:当value(b),value(g)、value(r)同时等于z0,认为该像素为空值,将空值像素点对应归入像素坐标点集,得到空值检测的缺陷区域sz={(x
4i
,y
4i
)},其中(x
zi
,y
zi
)代表第i个空值的位置信息,x
zi
上标z代表空值指标项。
[0119]
第三步:设定一个面积阈值rz,若空值的可用区域的最大可用影像块的面积小于rz,则所述空值的评价分数为0,同时所述空值的可用区域也将调整为0。
[0120]
若所述空值的可用区域的最大可用影像块的面积大于或等于rz:可选的:首先,在[0%,90%]划分为多个空值数值域,每一个空值数值域对应一个空值指标
分数。本实例中设置了[0,1%]、(1%,5% ]、(5%,10% ]、(10%,20%]、(20%,30%]、(30%,40% ]、(40%,50% ]、(50%,60% ]、(60%,80% ]、(80%,100% ]这10个空值数值域,每个空值数值域对应的空值指标分数为100、95、90、85、80、75、65、50、30、0。
[0121]
计算空值像素点总面积占整幅遥感影像总面积的比值:其中,iz为比值,
ʃ
sz为空值像素总面积,s为遥感影像总面积。
[0122]
将iz对应到空值数值域中,得到对应的空值的评价分数。
[0123]
可选的:将iz直接换算为空值的评价分数:100-iz×
100。
[0124]
具体地,所述第一类指标项的评价分数、所述第二类指标项的评价分数、所述第三类指标项的评价分数和所述第四类指标项的评价分数组成所述指标项可用性质量评价分数。
[0125]
需要说明的是,上述所述的原始文件损失的评价分数、原始文件缺失的评价分数、直方图异常的评价分数、波段一致性的评价分数、波段匹配性的评价分数、内部错位畸变的评价分数包含于所述第一类指标项的评价分数;上述所述的侧视角的评价分数包含于所述第二类指标项的评价分数;上述所述的光谱错位的评价分数包含于所述第三类指标项的评价分数;上述所述的云量的评价分数、阴影的评价分数、条带异常的评价分数、高曝光的评价分数、空值的评价分数包含于所述第四类指标项的评价分数。
[0126]
需要明确的是,上述所述的所述第一类指标项的评价分数、所述第二类指标项的评价分数、所述第三类指标项的评价分数和所述第四类指标项的评价分数组成所述指标项可用性质量评价分数,指的是,原始文件损失的评价分数、原始文件缺失的评价分数、直方图异常的评价分数、波段一致性的评价分数、波段匹配性的评价分数、内部错位畸变的评价分数、侧视角的评价分数、光谱错位的评价分数、云量的评价分数、阴影的评价分数、条带异常的评价分数、高曝光的评价分数、空值的评价分数包含于所述指标项可用性质量评价分数。
[0127]
s32综合计算多个所述指标项可用性质量评价分数,得到遥感影像的可用性质量评价分数。
[0128]
具体地,步骤s32包括:s321若任一所述指标项可用性质量评价分数为0,则所述遥感影像的可用性质量评价分数为0。
[0129]
例如,所述原始文件损失的评价分数为0,而其余指标项的可用性质量评价分数均不为0,则所述遥感影像的可用性质量评价分数即被判定为0。
[0130]
s322设定面积阈值,若任一所述指标项可用区域的面积小于面积阈值,则所述遥感影像的可用性质量评价分数为0。
[0131]
本发明一实施例中,面积阈值z为1000
×
1000像素大小的面积。例如,所述云量的可用区域的面积不足1000
×
1000像素大小,而其余指标项可用区域的面积均超过了1000
×
1000像素大小,则所述遥感影像的可用性质量评价分数仍旧被判定为0。
[0132]
s323若任一所述指标项可用性质量评价分数大于0,同时任一所述指标项可用区
域的面积大于面积阈值,对所述指标项可用性质量评价分数进行整体计算,得到所述遥感影像的可用性质量评价分数。
[0133]
具体地,本发明一实施例中,步骤s323包括:对所述可用性质量评价指标项建立主观权重系数,所有的所述可用性质量评价指标项的权重系数之和为1,所述主观权重系数的建立方法包括delphi法、ahp法和专家评分法。
[0134]
本实施例采用delphi法,构建的权重系数如表1所示。
[0135]
表1 遥感影像的可用性质量评价指标项的权重系数将所述指标项可用性质量评价分数和对应的权重系数相乘后求和,得到所述遥感影像的可用性质量评价分数。
[0136]
s4:设定划分策略,根据所述划分策略基于所述可用性质量评价分数对所述遥感影像的可用性质量进行等级划分,得到所述遥感影像的可用性质量等级表。
[0137]
所述划分策略为:设置多个预设阈值,将所述多个预设阈值按照从大到小排序,每两个阈值之间形成阈值区间,并对每个所述阈值区间设置质量等级;将所述遥感影像的可用性质量评价分数与所述阈值区间进行比对,对所述遥感影像的可用性质量评价分数进行质量等级的评定。
[0138]
本实施例中,形成的所述遥感影像的可用性质量等级表如表2所示。
[0139]
表2 遥感影像的可用性质量等级表以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。