1.本发明属于测控技术领域,具体涉及一种测控设备轴系误差无塔融合标校方法。
背景技术:
2.目前传统测控设备机动中主要采用传统的固定点位模式完成测控任务,需要大地精确测量成果和标校塔(杆),实现定位、定向和测角轴系误差标定。
3.近几年测控设备针对非预设的应急点位,采取gps/北斗定位、寻北仪寻北,测角修正参数采用经验值等方法,但寻北仪本身寻北误差较大,经验值也会随着场区外部和系统内部环境变化而变化,给测角精度和天线指向引入新的较大误差。为摆脱对标校塔(杆)的依赖,准确定位定向并标定测角修正系数,前期也实验过无塔射电星轴系误差标定方法。但由于测控设备的天线口径相较固定测控设备小,且因转场撤收、展开引起稳定性不足,导致无塔射电星标校结果不够理想,精度和稳定性都存在一定差距。
技术实现要素:
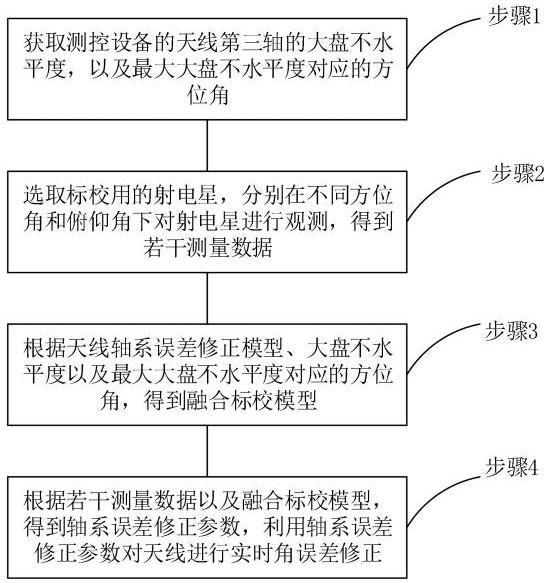
4.为了解决现有技术中存在的上述问题,本发明提供了一种测控设备轴系误差无塔融合标校方法。本发明要解决的技术问题通过以下技术方案实现:本发明提供了一种测控设备轴系误差无塔融合标校方法,包括:步骤1:获取测控设备的天线第三轴的大盘不水平度,以及最大大盘不水平度对应的方位角;步骤2:选取标校用的射电星,分别在不同方位角和俯仰角下对所述射电星进行观测,得到若干测量数据;步骤3:根据天线轴系误差修正模型、所述大盘不水平度以及所述最大大盘不水平度对应的方位角,得到融合标校模型;步骤4:根据若干所述测量数据以及所述融合标校模型,得到轴系误差修正参数,利用所述轴系误差修正参数对所述天线进行实时角误差修正。
5.在本发明的一个实施例中,所述步骤1包括:步骤1.1:将光学合像水平仪放置在所述天线第三轴顶端的平台处,记录所述天线位于初始位置时该光学合像水平仪的读数,所述初始位置为所述天线的方位角和俯仰角均为0
°
;步骤1.2:固定所述天线的俯仰角不变,方位角逐渐增大至360
°
,每间隔30
°
记录所述光学合像水平仪的读数;步骤1.3:根据所述光学合像水平仪的所有读数数据拟合曲线,根据该拟合曲线计算得到大盘不水平度以及最大大盘不水平对应的方位角。
6.在本发明的一个实施例中,所述步骤2包括:步骤2.1:选取标校用的射电星,对所述射电星进行跟踪、偏开以及扫描观测,完成一次单点测量,得到一次单点测量数据;
步骤2.2:根据所述单点测量数据,确定天线实际中心测量值,并拟合得到所述射电星的当前理论位置;步骤2.3:计算所述天线实际中心测量值与所述射电星的当前理论位置的差值,得到天线方位角测量误差和天线俯仰角测量误差;步骤2.4:重复步骤2.1-步骤2.3,跟踪所述射电星,进行多次采样测量,得到在不同方位角和俯仰角下的天线方位角测量误差和天线俯仰角测量误差以及若干单点测量数据。
7.在本发明的一个实施例中,所述天线轴系误差修正模型为:;式中,表示天线方位角测量误差;表示天线俯仰角测量误差;表示天线方位角零值误差;表示天线俯仰角零值误差;表示天线大盘不水平度;表示天线大盘不水平度对应的方位角;表示天线轴角编码器输出的方位角测量值;表示天线轴角编码器输出的俯仰角测量值;表示方位轴和俯仰轴不正交度;表示光轴和电轴不匹配横向分量系数;表示光轴和电轴不匹配纵向分量系数;表示重力下垂变形误差系数;表示光轴和机械轴不匹配横向分量系数;表示方位误差电压;表示俯仰误差电压;表示方位支路角定向灵敏度系数;表示俯仰支路角定向灵敏度系数;表示电波折射误差。
8.在本发明的一个实施例中,所述步骤3包括:将所述大盘不水平度以及所述最大大盘不水平度对应的方位角代入所述天线轴系误差修正模型中,得到所述融合标校模型。
9.在本发明的一个实施例中,所述步骤4包括:步骤4.1:将不同方位角和俯仰角下的天线方位角测量误差和天线俯仰角测量误差以及若干单点测量数据代入所述融合标校模型,利用最小二乘法计算得到轴系误差参数,所述轴系误差参数包括光轴和电轴不匹配横向分量系数,光轴和电轴不匹配纵向分量系数和光轴和机械轴不匹配横向分量系数;步骤4.2:天线控制单元根据所述轴系误差修正参数对所述天线进行实时角误差修正。
10.与现有技术相比,本发明的有益效果在于:1. 本发明的测控设备轴系误差无塔融合标校方法,对轴系误差修正可以彻底摆脱对场地大地方位标和标校塔的依赖;2. 本发明的测控设备轴系误差无塔融合标校方法,对轴系误差修正后,测角精度满足系统差和随机差的指标要求;
3. 本发明的测控设备轴系误差无塔融合标校方法,测控设备可以转场到任一阵地,可快速精确展开角度标定,与传统方法相比简单快捷。
11.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
12.图1是本发明实施例提供的一种测控设备轴系误差无塔融合标校方法的示意图;图2是本发明实施例提供的光学合像水平仪测量测控设备第三轴大盘不水平图;图3是发明实施例提供的对射电星进行单点跟踪采样时,偏开扫描获取的噪声功率分布图;图4是发明实施例提供的测控设备的天线对射电星进行跟踪扫描获取的采样点分布图和标校系统指向精度分析图;图5是发明实施例提供的测控设备无塔融合标校设备连接示意图。
具体实施方式
13.为了进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及具体实施方式,对依据本发明提出的一种测控设备轴系误差无塔融合标校方法进行详细说明。
14.有关本发明的前述及其他技术内容、特点及功效,在以下配合附图的具体实施方式详细说明中即可清楚地呈现。通过具体实施方式的说明,可对本发明为达成预定目的所采取的技术手段及功效进行更加深入且具体地了解,然而所附附图仅是提供参考与说明之用,并非用来对本发明的技术方案加以限制。
15.实施例一请参见图1,图1是本发明实施例提供的一种测控设备轴系误差无塔融合标校方法的示意图,如图所示,本实施例的一种测控设备轴系误差无塔融合标校方法,其特征在于,包括:步骤1:获取测控设备的天线第三轴的大盘不水平度,以及最大大盘不水平度对应的方位角;在本实施例中,请结合参见图5,图5是发明实施例提供的测控设备无塔融合标校设备连接示意图。如图所示,本实施例的测控设备无塔融合标校设备包括天线、场放单元、下变频单元、功率计、标校计算机、天线控制单元、天线驱动单元。其中,将标校计算机与天线控制单元(acu)连接,功率计与设备下变频后的中频信号连接起来。
16.可选地,标校计算机与acu接口设计为网口,可将此接口及两端计算机的接口设计为标准接口,接口内容主要涉及时间、角度、控制命令的交换。
17.具体地,标校计算机通过rj45网口与天线控制单元(acu)连接,通过usb接口与功率计连接;功率计通过n口接受设备下变频后的中频信号,在本实施例中,功率计为nrp-18s功率探头。
18.具体地,步骤1包括:
步骤1.1:将光学合像水平仪放置在天线第三轴顶端的平台处,记录天线位于初始位置时该光学合像水平仪的读数,初始位置为天线的方位角和俯仰角均为0
°
;需要说明的是,天线的三轴指的是方位轴、俯仰轴和横切轴。在本实施例中,把光学合像水平仪放置在天线第三轴顶端平台处,天线初始位置为方位0
°
俯仰0
°
,调整此时光学合像水平仪测微螺杆旋钮至气泡重合,记录此时读数。
19.步骤1.2:固定天线的俯仰角不变,方位角逐渐增大至360
°
,每间隔30
°
记录光学合像水平仪的读数;步骤1.3:根据光学合像水平仪的所有读数数据拟合曲线,根据该拟合曲线计算得到大盘不水平度以及最大大盘不水平对应的方位角。
20.在本实施例中,如图2所示,图2是本发明实施例提供的光学合像水平仪测量测控设备第三轴大盘不水平图,根据光学合像水平仪的所有读数数据拟合曲线,根据该拟合曲线计算得到大盘不水平度以及最大大盘不水平对应的方位角。
21.步骤2:选取标校用的射电星,分别在不同方位角和俯仰角下对射电星进行观测,得到若干测量数据;具体地,步骤2包括:步骤2.1:选取标校用的射电星,对射电星进行跟踪、偏开以及扫描观测,完成一次单点测量,得到一次单点测量数据;在本实施例中,选取的标校用的射电星为太阳,通过引导测控设备的天线分别在方位角和俯仰角上完成对太的跟踪、偏开、扫描等观测,同时记录当前的天线实际中心测量值(也就是天线实际中心位置)、辐射计输出的信号幅度以及功率探头记录的下行信号噪声功率,并将上述数据传送至标校计算机。
22.步骤2.2:根据单点测量数据,确定天线实际中心测量值,并拟合得到射电星的当前理论位置;在本实施例中,根据一次单点测量的下行噪声功率数据,拟合得到射电星的当前理论位置,如图3所示,图3是发明实施例提供的对射电星进行单点跟踪采样时,偏开扫描获取的噪声功率分布图。
23.步骤2.3:计算天线实际中心测量值与射电星的当前理论位置的差值,得到天线方位角测量误差和天线俯仰角测量误差;步骤2.4:重复步骤2.1-步骤2.3,跟踪射电星,进行多次采样测量,得到在不同方位角和俯仰角下的天线方位角测量误差和天线俯仰角测量误差以及若干单点测量数据。
24.在本实施例中,重复步骤2.1-步骤2.3,从上午10点到下午3点跟踪太阳,进行多次采样测量,得到在不同方位角和俯仰角下的天线方位角测量误差和天线俯仰角测量误差以及若干单点测量数据。采集的数据如图4所示,图4是发明实施例提供的天线对射电星进行跟踪扫描获取的采样点分布图和标校系统指向精度分析图。
25.步骤3:根据天线轴系误差修正模型、大盘不水平度以及最大大盘不水平度对应的方位角,得到融合标校模型;在本实施例中,天线轴系误差修正模型为:
(1);式中,表示天线方位角测量误差;表示天线俯仰角测量误差;表示天线方位角零值误差;表示天线俯仰角零值误差;表示天线大盘不水平度;表示天线大盘不水平度对应的方位角;表示天线轴角编码器输出的方位角测量值;表示天线轴角编码器输出的俯仰角测量值;表示方位轴和俯仰轴不正交度;表示光轴和电轴不匹配横向分量系数;表示光轴和电轴不匹配纵向分量系数;表示重力下垂变形误差系数;表示光轴和机械轴不匹配横向分量系数;表示方位误差电压;表示俯仰误差电压;表示方位支路角定向灵敏度系数;表示俯仰支路角定向灵敏度系数;表示电波折射误差。
26.具体地,将步骤1获取的大盘不水平度以及最大大盘不水平对应的方位角代入公式(1)的天线轴系误差修正模型中,得到融合标校模型。
27.步骤4:根据若干测量数据以及融合标校模型,得到轴系误差修正参数,利用轴系误差修正参数对天线进行实时角误差修正。
28.具体地,步骤4包括:步骤4.1:将不同方位角和俯仰角下的天线方位角测量误差和天线俯仰角测量误差以及若干单点测量数据代入融合标校模型,利用最小二乘法计算得到轴系误差参数。
29.在本实施例中,将步骤2.4中115个有效单点测试数据代入融合标校模型中,利用最小二乘法综合求解轴系误差参数,该轴系误差参数包括光轴和电轴不匹配横向分量系数,光轴和电轴不匹配纵向分量系数和光轴和机械轴不匹配横向分量系数。
30.步骤4.2:天线控制单元根据轴系误差修正参数对天线进行实时角误差修正。
31.在本实施例中,天线控制单元根据轴系误差修正参数,控制天线驱动单元驱动天线转动,实现天线的实时角误差修正。
32.本实施例的测控设备轴系误差无塔融合标校方法,测控设备可以转场到任一阵地,可快速精确展开角度标定,与传统方法相比简单快捷。而且利用本实施例的测控设备轴系误差无塔融合标校方法,对轴系误差修正可以彻底摆脱对场地大地方位标和标校塔的依赖;另外,对轴系误差修正后,测角精度满足系统差和随机差的指标要求。
33.应当说明的是,在本文中,术语“包括”、“包含”或者任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的物品或者设备中还存在另外的相同要素。“连接”或者“相连”等类似
的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
34.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
