1.本发明属于光纤仿生传感技术领域,尤其涉及基于光纤触觉感知的智能仿生传感系统。
背景技术:
2.人体获取和感知外界环境信息主要依赖视觉、听觉、嗅觉、味觉和触觉等五大人体感知系统(也被称为“五感”),即通过相关器官(器官所属神经元、感受体细胞等)将外界刺激转换为神经脉冲电信号传到大脑进行处理和分析,进而实现对外界环境的感受与认知。这些器官的生物运行机制,一直是科学家们苦苦追寻的谜题。需要关注的是,人类的感知会受到环境、生理、心理等因素影响,具有很强的主观性和个体差异性,这会降低信息的可靠性,也给环境信息感受的定量评估与传递带来了困难。而基于仪器的检测技术能产生稳定的环境信号,并能定量反馈环境信息。因此,解决仪器反馈信息与“人体感知”的互通性,对于“人机交互技术”提升及了解人体器官生物运行机制具有重要意义。而人工仿生检测技术及系统,特别是智能仿生系统,是搭接“人体感知”与机器定量检测的有效“桥梁”。另外,掌握人体器官生物运行机制,可极大提升仪器的智能化水平,进而提高仪器性能。例如,人类在掌握视觉感知生理机理后,视觉智能感知技术得到飞速发展,并催生了以图像处理器(gpu)为代表的图像智能处理系统。其图像处理性能和识别能力远超人眼,可应对各种复杂场景图像感知,这为自动驾驶汽车、vr成像等领域发展奠定了硬件基础与保障。因此,开发智能仿生系统及技术意义重大。
3.然而,要想真实模拟人类精密完善的感知神经系统具有很大挑战,这不仅需要传感器自身灵敏度高、准确性高、抗干扰能力强,并且信号传递系统的鲁棒性、阈值调控性等也要好。另外,要全面、真实的模拟人体感知系统,需要构建多功能神经反馈单元,实现多模态传感融合(如视觉-触觉,图像-语音融合等)。例如采用“视觉-触觉”双模态仿生系统,可增强黑暗环境种信号识别能力,进而可提高机械手工作效能。
4.触觉常被认为是“感知之母”,主要通过皮肤内的感受器(受体细胞、神经元等)受到外界刺激时产生相应的电信号,再传递至大脑以生成“触觉图像”。该“触觉图像”可实现人类感知环境的热或冷、干燥或潮湿、光滑或粗糙、软或硬等信息。触觉主要包含人体对环境温度、机械力(压力、应变、振动)等物理参量的感知。触觉感知过程不仅仅是将一种物理特性转换为神经电信号,还包含对信号的加工、分析以及得到对应视实物图像的关联性,这是一个智能运算的过程。因此,要实现智能感知仿生,系统需具备触觉信号的定量提取、分析与智能表征等功能。模拟和构建触觉感知仿生系统,是人机交互技术、医学研究、生物学和人体机能增强等领域需要研究的基础科学问题和需要掌握的关键技术。另外,触觉感知系统可用于医学诊断、人体机能康复、人机机能增强等,还可使机器人具备人体感知能力,最终可真正实现人体-机器-环境之间信息无障碍交互。因此,开发仿生触觉智能感知系统意义重大且需求紧迫。
5.人类的触觉主要包括了对环境温度、压力和振动的关键物理参量的感知。其中温
度感知是人体应对于外界温度变化进行温度调节的首要环节;压力感知用于人体感知外界物质的真实性及其软硬度;人体对物体表面纹理的粗糙、光滑程度的判别主要依靠于对摩擦振动的感知。因此具备对温度、压力和振动这三个基本物理参量的感知能力,是触觉仿生传感系统必须具备的基础传感检测能力。另外,目前的人工感知系统只能实现简单的分析计算,如阈值评估、峰值检测等,这难以实现对环境事态的真实关联感知,因此,仿生触觉感知系统需具备需具备“思考力”,即其信号处理子系统应具有类脑深度学习能力(即需构建出神经网络),最终实现人类感官数字化。
6.目前还没有能够完全模拟和实现人类皮肤的触觉感知功能的有效技术手段。就传统的电学式温度、压力、振动传感器而言,其应用范围受限于体积大、受电磁干扰、灵敏度低、伴随有寄生效应等缺陷。而近些年发展的光纤传感器得益于其结构紧凑、抗电磁干扰、灵敏度高、响应时间短以及容易组网等优点而广受关注。值得注意的是,现有能用于触觉仿生传感范畴内的光纤传感器,其功能都比较单一,只能对温度、压力和振动其中的一个或两个参量进行传感,若基于现有的光纤传感器构建触觉仿生传感系统,其系统的复杂度以及使用成本将随之增高。
技术实现要素:
7.为解决上述问题,本发明提出基于光纤触觉感知的智能仿生传感系统,旨在解决现有技术中存在的不能将触觉感知进行定量分析的问题。该传感器结构紧凑简单,可将触觉感知数字信息化、可视化、智能化。
8.为实现上述目的,本发明提供了基于光纤触觉感知的智能仿生传感系统,包括,光纤仿生传感器、光路子系统和触觉信号智能处理子系统;
9.所述光纤仿生传感器用于获取被测物体的触觉信号,并将所述触觉信号进行转换;
10.所述光路子系统用于根据转换后的所述触觉信号获得触觉光信号,根据所述触觉光信号获得所述被测物体的表面温度,并将所述触觉光信号传递至所述触觉信号智能处理子系统;
11.所述触觉信号智能处理子系统用于根据所述触觉光信号识别所述被测物体的软硬度和表面粗糙度。
12.可选地,所述光纤仿生传感器包括类指纹式接触层与柔性传感层;
13.所述类指纹式接触层用于获取所述触觉信号,并将所述触觉信号传递至所述柔性传感层;
14.所述柔性传感层用于将所述温度信号、压力信号与振动信号进行转换。
15.可选地,所述柔性传感层包括pdms封装层与微纳光纤耦合器;
16.所述pdms封装层用于将所述触觉信号传递至所述微纳光纤耦合器;
17.所述微纳光纤耦合器包括微纳光纤耦合器端口ⅰ、微纳光纤耦合器端口ⅱ、微纳光纤耦合器端口ⅲ、微纳光纤耦合器端口ⅳ;
18.所述微纳光纤耦合器用于将所述所述触觉信号进行转换。
19.可选地,所述触觉信号包括温度信号、压力信号与振动信号;
20.所述微纳光纤耦合器将所述温度信号转化为所述微纳光纤耦合器中光的特征波
长漂移;
21.所述微纳光纤耦合器将所述压力信号与振动信号转换为所述微纳光纤耦合器的弯曲应变。
22.可选地,所述光路子系统包括ase宽谱光源、50/50光纤耦合器、光谱分析仪、窄带带通滤波器、第一光电探测器、第二光电探测器和数字采集卡;
23.所述ase宽谱光源通过所述微纳光纤耦合器端口ⅰ与所述光纤仿生传感器连接,用于输出宽带光束至所述光纤仿生传感器;
24.所述50/50光纤耦合器通过所述微纳光纤耦合器端口ⅲ与所述光纤仿生传感器连接;
25.所述50/50光纤耦合器包括50/50光纤耦合器输出端口ⅰ与50/50光纤耦合器输出端口ⅱ;
26.所述光谱分析仪通过所述50/50光纤耦合器输出端口ⅰ与所述50/50光纤耦合器连接,所述光谱分析仪用于基于所述光的特征波长漂移检测所述被测物体的表面温度;
27.所述窄带带通滤波器通过所述50/50光纤耦合器输出端口ⅱ与所述50/50光纤耦合器连接,所述窄带带通滤波器还通过所述微纳光纤耦合器端口ⅳ与所述光纤仿生传感器连接;
28.所述窄带带通滤波器与所述数字采集卡之间分别通过所述第一光电探测器与所述第二光电探测器连接,所述数字采集卡用于采集所述第一光电探测器输出的第二触觉光信号与所述第二光电探测器输出的第一触觉光信号,并传递至所述触觉信号智能处理子系统。
29.可选地,所述光路子系统中的光信号路径为:
30.所述宽谱光源输出宽带光束,经过所述微纳光纤耦合器端口ⅰ输入至所述光纤仿生传感器,在所述光纤仿生传感器中所述宽带光束被分束为第一光束与第二光束,所述第一光束从所述微纳光纤耦合器端口ⅲ输出至所述50/50光纤耦合器又被分束为第三光束与第四光束,所述第三光束通过所述50/50光纤耦合器输出端口ⅰ输出进入所述光谱分析仪osa,用于通过监测所述特征波长漂移,来检测所述被测物体的表面温度;所述第四光束通过所述50/50光纤耦合器输出端口ⅱ输出进入所述窄带带通滤波器后进入所述第二光电探测器,获取所述第一触觉光信号;所述第二光束通过所述微纳光纤耦合器端口ⅳ输出进入所述窄带带通滤波器后进入所述第一光电探测器,获取所述第二触觉光信号,所述第一触觉光信号与所述第二触觉光信号均被所述数字采集卡采集。
31.可选地,所述类指纹式接触层的制备方法为:基于ptfe,3d打印呈“同心”椭圆环状的反向结构模具,基于第一配比的pdms溶液与所述反向结构模具制备所述类指纹式接触层。
32.可选地,所述pdms封装层的制备方法为:基于第二配比的pdms溶液均匀涂在特氟龙基片上,采用三段旋涂法旋涂所述pdms溶液,基于旋涂后的所述pdms溶液加热固化制备所述pdms封装层;
33.所述微纳光纤耦合器的制备方法为:基于两根常规商用单模光纤,进行拉锥部位塑料涂覆层剥离,剥离后裸露的位置处进行相互缠绕、固定加热,并进行拉锥制备所述微纳光纤耦合器;
34.所述柔性传感层的制备方法为:将所述微纳光纤耦合器嵌入到所述pdms封装层中制备所述柔性传感层。
35.可选地,光纤仿生传感器的制备方法为:基于所述第二配比的pdms溶液,将所述所述类指纹式接触层与所述柔性传感层粘接在一起,并加热固化制备光纤仿生传感器。
36.与现有技术相比,本发明具有如下优点和技术效果:
37.本发明利用微纳光纤耦合器的大比例倏逝场以及pdms较大的负热光系数特性,能够通过温度至折射率变化引起的波长漂移量进行对温度的检测,其灵敏度可高达2.5nm/℃。
38.本发明利用类指纹式的凸起椭圆环状的接触层结构,其不仅能检测一维单方向上相对摩擦运动,同时也能检测二维方向的相对摩擦运动。
39.本发明利用pdms封装层以及微纳光纤耦合器的柔韧性,能够敏锐检测到发生在接触层表面上的纵向应变程度以及横向的相对摩擦运动情况,以触觉振动信号的特征振幅、频率形式表征相应被测物体的软硬度和表面纹理的粗糙、光滑程度。
40.本发明利用小波变化将获得的触觉信号进行特征提取,接着利用机器学习算法将不同物体表面纹理特征对应的不同频率的特征信号进行分类并建立数据库,随后将所获得的触觉信号经特征提取后与数据库里的特征信号进行互相关运算以判断是否匹配,进而达到特征识别的目的。
41.本发明可以先用类指纹式接触层接触被测物体表面以检测其表面温度,随后按压或者摩擦被测物体以检测其软硬度和表面粗糙度,将其触觉振动信号经特征提取后与所建立的数据库里的特征信号进行特征匹配,进而可实现同时检测物体表面温度和识别物体软硬度、表面粗糙度的触觉仿生功能。
附图说明
42.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
43.图1为本发明实施例一的基于光纤触觉感知的智能仿生传感系统结构示意图;
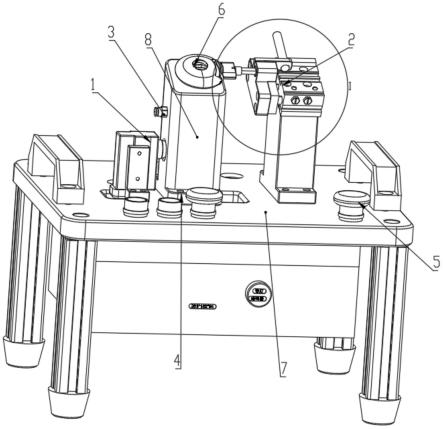
44.图2为本发明实施例一的光纤仿生传感器结构示意图;
45.图3为本发明实施例一的光纤仿生传感器的前视图;
46.图4为本发明实施例一的光纤仿生传感器的顶视图;
47.图5为本发明实施例一的触觉信号智能处理子系统的处理流程示意图;
48.其中,1、常规商用单模光纤;2、微纳光纤的锥形过渡区;3、微纳光纤的均匀腰区;4、类指纹式接触层;5、pdms封装层;6、微纳光纤耦合器端口ⅰ;7、微纳光纤耦合器端口ⅱ;8、微纳光纤耦合器端口ⅲ;9、微纳光纤耦合器端口ⅳ;10、ase宽谱光源;11、光纤仿生传感器;12、50/50光纤耦合器;13、50/50光纤耦合器输出端口ⅰ;14、50/50光纤耦合器输出端口ⅱ;15、光谱分析仪;16、窄带带通滤波器;17、第一光电探测器;18、第二光电探测器;19、数字采集卡;20、触觉信号智能处理子系统。
具体实施方式
49.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相
互组合。下面将参考附图并结合实施例来详细说明本技术。
50.需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
51.本发明提供了一种基于光纤触觉感知的智能仿生传感系统,包括,光纤仿生传感器11、光路子系统、触觉信号智能处理子系统20;其中触觉信号智能处理子系统20(tactile signal intelligent processing subsystem)简称tsps。
52.光纤仿生传感器11用于获取被测物体的触觉信号,并将触觉信号进行转换;
53.光路子系统用于根据转换后的触觉信号获得触觉光信号,根据触觉光信号获得被测物体的表面温度,并将触觉光信号传递至触觉信号智能处理子系统;
54.触觉信号智能处理子系统20用于将触觉光信号进行特征提取和分类,并建立数据库,进行信号特征匹配,识别被测物体的软硬度和表面粗糙度。
55.光纤仿生传感器11包括类指纹式接触层4与柔性传感层;
56.类指纹式接触层呈“同心”椭圆环状凸起,用于获取触觉信号,并将触觉信号传递至柔性传感层;
57.柔性传感层用于将温度信号、压力信号与振动信号进行转换。
58.柔性传感层包括pdms封装层5与微纳光纤耦合器;
59.pdms封装层5用于将触觉信号传递至微纳光纤耦合器;
60.微纳光纤耦合器包括微纳光纤耦合器端口ⅰ6、微纳光纤耦合器端口ⅱ7、微纳光纤耦合器端口ⅲ8、微纳光纤耦合器端口ⅳ9;
61.微纳光纤耦合器用于将触觉信号进行转换。
62.触觉信号包括温度信号、压力信号与振动信号;
63.微纳光纤耦合器将温度信号转化为微纳光纤耦合器中光的特征波长漂移;
64.微纳光纤耦合器将压力信号与振动信号转换为微纳光纤耦合器的弯曲应变。
65.光路子系统包括ase宽谱光源10、50/50光纤耦合器12、光谱分析仪15、窄带带通滤波器16、第一光电探测器17和第二光电探测器18与数字采集卡19;其中ase宽谱光源10简称ase,光谱分析仪15简称osa,窄带带通滤波器16简称bpf,数字采集卡19简称daq。
66.ase宽谱光源10通过微纳光纤耦合器端口ⅰ6与光纤仿生传感器11连接,用于输出宽带光束至光纤仿生传感器11;
67.50/50光纤耦合器12通过微纳光纤耦合器端口ⅲ8与光纤仿生传感器11连接;
68.50/50光纤耦合器12包括50/50光纤耦合器输出端口ⅰ13与50/50光纤耦合器输出端口ⅱ14;
69.光谱分析仪15通过50/50光纤耦合器输出端口ⅰ13与50/50光纤耦合器12连接,光谱分析仪15用于基于光的特征波长漂移检测被测物体的表面温度;
70.窄带带通滤波器16通过50/50光纤耦合器输出端口ⅱ14与50/50光纤耦合器12连接,窄带带通滤波器16还通过微纳光纤耦合器端口ⅳ9与光纤仿生传感器11连接;
71.窄带带通滤波器16与数字采集卡19之间分别通过第一光电探测器17与第二光电探测器18连接,数字采集卡19用于采集第一光电探测器17输出的第二触觉光信号与第二光电探测器18输出的第一触觉光信号,并传递至触觉信号智能处理子系统20。
72.光路子系统中的光信号路径为:
73.ase宽谱光源10输出宽带光束,经过微纳光纤耦合器端口ⅰ6输入至光纤仿生传感器11,在光纤仿生传感器11中宽带光束被分束为第一光束与第二光束,第一光束从微纳光纤耦合器端口ⅲ8输出至50/50光纤耦合器12又被分束为第三光束与第四光束,第三光束通过50/50光纤耦合器输出端口ⅰ13输出进入光谱分析仪15,用于通过监测特征波长漂移,来监测被测物体的表面温度;第四光束通过50/50光纤耦合器输出端口ⅱ14输出进入窄带带通滤波器16后进入第二光电探测器18,获取第一触觉光信号;第二光束通过微纳光纤耦合器端口ⅳ9输出进入窄带带通滤波器17后进入第一光电探测器17,获取第二触觉光信号,第一触觉光信号与第二触觉光信号均被数字采集卡19采集。
74.类指纹式接触层4的制备方法为:基于ptfe,3d打印呈“同心”椭圆环状的反向结构模具,基于第一配比的pdms溶液与反向结构模具制备类指纹式接触层4。第一配比的pdms溶液为材质为主剂与固化剂重量比为20:1的pdms。
75.pdms封装层5的制备方法为:基于第二配比的pdms溶液均匀涂在特氟龙基片上,采用三段旋涂法旋涂pdms溶液,基于旋涂后的pdms溶液加热固化制备pdms封装层5;第二配比的pdms溶液为主剂与固化剂重量比为10:1的pdms。
76.微纳光纤耦合器的制备方法为:基于两根常规商用单模光纤,进行拉锥部位塑料涂覆层剥离,剥离后裸露的位置处进行相互缠绕、固定加热,并进行拉锥制备微纳光纤耦合器。
77.柔性传感层的制备方法为:将微纳光纤耦合器嵌入到pdms封装层5中制备柔性传感层。
78.光纤仿生传感器11的制备方法为:基于所述第二配比的pdms溶液,将所述所述类指纹式接触层4与所述柔性传感层粘接在一起,并加热固化制备光纤仿生传感器11。
79.实施例一
80.如图1所述,本实施例提供了一种基于光纤触觉感知的智能仿生传感系统,包括,光纤仿生传感器11、光路子系统、触觉信号智能处理子系统20。光纤仿生传感器11包括类指纹式接触层4和柔性传感层,pdms封装层5和微纳光纤耦合器;触觉信号智能处理子系统20包括小波变换、基于机器学习的特征分类和信号特征匹配。
81.类指纹式接触层4使用聚合物材料pdms,类指纹式地呈“同心”椭圆环状凹凸分布;
82.柔性传感层包括pdms封装层5以及嵌入pdms封装层中的微纳光纤耦合器;
83.pdms的折射率小于微纳光纤耦合器的折射率;
84.类指纹式接触层4与柔性传感层通过pdms粘接在一起。
85.使用pdms主剂与固化剂重量比为20:1固化后的pdms作为类指纹式接触层4。
86.类指纹式接触层4中每个椭圆环凸起的高度为1mm,宽度为2mm,每相邻两个凸起椭圆环之间长轴的距离为2mm,短轴的距离为1mm。
87.使用pdms主剂与固化剂重量比为10:1固化后的pdms作为pdms封装层5,其厚度为100um。
88.类指纹式接触层4的杨氏模量大于pdms封装层5的杨氏模量。
89.微纳光纤耦合器中微纳光纤的均匀腰区直径为3um,长度为8mm。
90.微纳光纤耦合器嵌入在pdms封装层5中。
91.使用pdms主剂与固化剂重量比为10:1的pdms作为粘接层将类指纹式接触层4与柔性传感层粘接在一起,构成光纤仿生传感器11。
92.ase宽谱光源10直连微纳光纤耦合器端口ⅰ6,微纳光纤耦合器端口ⅲ8直连50/50光纤耦合器12,50/50光纤耦合器输出端口ⅰ13连接光谱分析仪15,50/50光纤耦合器输出端口ⅱ14连接窄带带通滤波器16,微纳光纤耦合器端口ⅳ9直连窄带带通滤波器16,窄带带通滤波器16的两个输出端分别连接两个光电探测器,两个光电探测器连接数字采集卡19,数字采集卡19连接触觉信号智能处理子系统20。
93.光纤仿生传感器11采集到的触觉信号,经小波变换进行信号特征提取,接着通过机器学习算法将不同特征的信号进行分类并建立所述数据库。
94.本发明基于以下工作原理:
95.根据微纳光纤耦合器的耦合性质,其端口ⅲ和端口ⅳ的输出光强度分别由以下表达式定义:
[0096][0097]
式中,p1为输入光的强度,l为耦合长度(即均匀腰区长度),c(λ,n2,z)为耦合位置z处的耦合系数。
[0098]
对于微纳光纤耦合器均匀腰区的耦合可以看作是均匀腰区两根微纳光纤之间的强耦合。在强耦合的情况下,两根微纳光纤相互接触和融合,则耦合区域位置z处的耦合系数可以表示为:
[0099][0100]
其中,为归一化频率,r为均匀腰区中微纳光纤的半径,λ为入射光的波长,n2和n3分别为光纤和外界环境(pdms)的折射率。
[0101]
当类指纹式接触层4与被测物体接触时,被测物体表面的温度会传递到类指纹式接触层4和柔性传感层,由于微纳光纤耦合器的大比例倏逝场以及pdms的大负热光系数,引起微纳光纤耦合器的外部折射率n3发生变化,进而调制光信号的波长,产生波长漂移现象。通过监测特征波长(如波峰或波谷)的漂移量检测温度。
[0102]
当类指纹式接触层4与被测物体接触时,所产生的压力会通过类指纹式接触层4传递到所述类指纹式传感层,最后使微纳光纤耦合器发生径向弯曲应变,从而产生弯曲损耗,即输出强度p3和p4变小,进而实现压力调制光信号的强度,其强度与径向弯曲应变的大小呈反比关系。由于不同被测物体的机械软硬度不同,在施加相同的压力情况下,机械硬度较大的被测物体会引起微纳光纤耦合器较大的弯曲应变,而机械硬度较小的被测物体所引起微纳光纤耦合器的弯曲应变则相对较小,通过监测总输出强度p3 p4的变化情况进行检测弯曲应变的大小,进而实现硬度识别的功能。
[0103]
当类指纹式接触层4与被测物体发生相对滑动时,由于类指纹式接触层4的杨氏模量要大于pdms封装层5的杨氏模量,类指纹式接触层4将滑动摩擦信号转换为振动信号,使微纳光纤耦合器发生弯曲应变,进而调制光信号的强度。通过监测总输出强度p3 p4,其振幅、频率随被测物体表面属性和滑动摩擦速度而变。
[0104]
利用空分复用技术,通过微纳光纤耦合器将光源输入的部分光耦合到另一根微纳光纤。微纳光纤耦合器的输出端口ⅲ输出的光进入50/50光纤耦合器后,经50/50光纤耦合器的输出端口ⅰ进入光谱分析仪,通过监测其透射谱中的特征波长漂移进行探测温度;50/50光纤耦合器12的另一端口ⅱ输出的光则进入窄带带通滤波器,随后进入光电探测器以探测其强度p3;微纳光纤耦合器的另一个输出端口ⅳ输出的光则经窄带带通滤波器16进行滤波后,进入光电探测器以探测其强度p4,接着通过数字采集卡将触觉信号采集到触觉信号处理系统中。通过检测其输出光的总强度p3 p4的幅度变化进行探测是否触碰被测物体以及被测物体的软硬度;通过监测输出光总强度p3 p4的幅度变化以及频率进行检测由滑动摩擦引起的触觉振动信号,并利用小波变换对触觉振动信号进行特征提取,接着通过机器学习算法将不同特征的信号进行分类并建立数据库,随后进行信号特征匹配,进而识别被测物体表面的粗糙程度。
[0105]
如图2所述,在本实施中所提供的光纤仿生传感器11,其结构自上而下由类指纹式接触层4和柔性传感层部分组成。其中类指纹式接触层4呈“同心”椭圆环状凸起;柔性传感层包括pdms封装层5和嵌入其中的微纳光纤耦合器,微纳光纤耦合器包括常规商用单模光纤1、微纳光纤的锥形过渡区2、微纳光纤的均匀腰区3,还有4个输入输出端口,分别为微纳光纤耦合器端口ⅰ6、微纳光纤耦合器端口ⅱ7、微纳光纤耦合器端口ⅲ8、微纳光纤耦合器端口ⅳ9。首先将由两根相互缠绕的常规商用单模光纤1通过熔融拉锥方式制备的微纳光纤耦合器嵌入已脱气处理的pdms封装层5中再加热固化以制备成柔性传感层,其次通过模具浇筑制备成类指纹式接触层4,接着在柔性传感层的上表面刷上一层pdms,随后将类指纹式接触层4水平放置于其上,随着pdms的固化,类指纹式接触层4与柔性传感层将紧紧粘接在一起以制备成光纤仿生传感器。
[0106]
类指纹式接触层4呈椭圆环状凸起,其中每个椭圆环凸起的高度为1mm,宽度为2mm,每相邻两个凸起椭圆环之间长轴的距离为2mm,短轴的距离为1mm,其材质为主剂与固化剂重量比为20:1的pdms。柔性传感层中,pdms封装层5的厚度为100um,其材质为主剂与固化剂重量比为10:1的pdms;微纳光纤耦合器中,微纳光纤的均匀腰区3直径为3um,长度为8mm,由两根所述微纳光纤相互缠绕而成微纳光纤耦合器,其材质主要为sio2(二氧化硅)。
[0107]
在本实施例中,类指纹式接触层4的实际制备方法如下:首先通过电脑solidworks软件设计出反向结构的模具,该结构呈“同心”椭圆环状,其中每个椭圆环凹陷的深度为1mm,宽度为2mm,每两个凹陷的椭圆环之间长轴的距离为2mm,短轴的距离为1mm;其次将设计好的模具cad文件导入3d打印机的操作软件,使用聚四氟乙烯(polytetrafluoroethylene,ptfe)作为3d打印的原材料,通过3d打印技术制备出反向结构的模具;配比主剂与固化剂重量比为20:1的pdms溶液,充分搅拌后使用真空泵抽出pdms溶液中的空气,以避免气泡所带来的影响;将已脱气处理的pdms溶液倒入模具中,随后使用温箱将其加热至80℃并放置30分钟以固化;将已固化的pdms从模具中脱离,即可制备出所述类指纹式接触层4。类指纹式接触层4可将与被测物体表面相互作用的触觉信息转换为温度
信号、压力信号和振动信号。
[0108]
在本实施例中,pdms封装层5的实际制备方法如下:配比主剂与固化剂重量比为10:1的pdms溶液,充分搅拌后使用真空泵抽出pdms溶液中的空气;将已脱气处理的pdms溶液倒置在特氟龙基片中央处,接着使用匀胶旋涂仪将pdms溶液均匀涂在特氟龙基片上并通过设置旋涂的转速和时间来控制其厚度,本实施例中采用三段旋涂法,第一段的旋涂转速为200rpm,时间为20s,第二段的旋涂转速为500rpm,时间为30s,第三段的旋涂转速为1000rpm,时间为30s,其中第一段和第二段旋涂目的在于将pdms均匀涂在基片上,第三段旋涂则将pdms的厚度减小至50um;将旋涂好的pdms加热至80℃并保持30分钟以固化得到pdms封装层5的底层;在已固化的均匀pdms膜上重复上述旋涂操作,以制备成pdms封装层5的顶层,其中pdms封装层5的底层和顶层厚度均为50um,即pdms封装层5的整体厚度为100um。
[0109]
在本实施例中,微纳光纤耦合器的实际制备方法如下:把两根常规商用单模光纤在需要进行拉锥的部位上的塑料涂覆层剥离掉,得到一段裸露的光纤;将两根常规商用单模光纤在其裸露的位置处进行相互缠绕,随后将其放置在拉锥位移平台的两端夹具上并固定,使得相互缠绕的裸纤部分对齐电加热器区域;将电加热器升温至1300℃以将光纤软化,随后操控拉锥位移平台以进行拉锥制备得所述微纳光纤耦合器,本实施例中微纳光纤耦合器的每根微纳光纤的均匀腰区直径3为3um,长度为8mm。
[0110]
在本实施例中,柔性传感层的实际制备方法如下:微纳光纤耦合器放置于pdms封装层5上,此时pdms封装层5的底层已固化,但其顶层仍处于已旋涂但未固化的液态,放置于其上的微纳光纤耦合器由于受自身重力因素则自然地嵌入到pdms封装层5的底层之上、顶层之下,随后将其加热至80℃并放置30分钟以固化pdms封装层5的顶层,制备得柔性传感层。柔性传感层中,由于pdms的弹性和柔韧性,可将类指纹式接触层4产生的触觉压力、振动信号传递至微纳光纤耦合器以产生弯曲损耗以及引起其腰区直径和耦合长度的变化;由于pdms具备较大的负热光系数,可将传感器外界温度变化转换为pdms折射率变化以至引起微纳光纤耦合器中光的特征波长漂移;由于所述微纳光纤耦合器的高灵敏度、大比例倏逝场和强耦合特性,可实现同时感知温度、触觉的仿生功能。
[0111]
在本实施例中,光纤仿生传感器11的实际制备方法如下:在pdms封装层5的顶层刷上一层厚度约为5um的主剂与固化剂重量比为10:1的pdms溶液用作粘合剂,随后将所述类指纹式接触层4与所述柔性传感层粘接在一起,最后将其加热至80℃并放置30分钟以固化粘合剂,即可制备光纤仿生传感器11。
[0112]
如图3与图4所示,分别为本发明光纤仿生传感器11结构的前视图和顶视图,采用该视角可以更完整、更直观地表现出光纤仿生传感器11的三维结构图,其结构自上而下由类指纹式接触层4和柔性传感层组成。其中,类指纹式接触层4呈“同心”椭圆环状凸起;柔性传感层包括pdms封装层5及嵌入其中的微纳光纤耦合器,微纳光纤耦合器包括常规商用单模光纤1、微纳光纤的锥形过渡区2、微纳光纤的均匀腰区3,还有4个输入输出端口,分别为微纳光纤耦合器端口ⅰ6、微纳光纤耦合器端口ⅱ7、微纳光纤耦合器端口ⅲ8和微纳光纤耦合器端口ⅳ9。
[0113]
如图1所示,本实施例提供的基于光纤触觉感知的智能仿生传感系统,其中包括ase宽谱光源10、光纤仿生传感器11、50/50光纤耦合器12、50/50光纤耦合器输出端口ⅰ13、50/50光纤耦合器输出端口ⅱ14、光谱分析仪15、窄带带通滤波器16、第一光电探测器17、第
二光电探测器18、数字采集卡19、触觉信号智能处理子系统20。
[0114]
在本实施例中,ase宽谱光源10输出宽带光束经过常规商用单模光纤1从微纳光纤耦合器端口ⅰ6输入至光纤仿生传感器11,经微纳光纤的均匀腰区3耦合至另一根微纳光纤后分束为两束光,其中一束光从微纳光纤耦合器端口ⅲ8输出至50/50光纤耦合器12又分束为两束光,从50/50光纤耦合器输出端口ⅰ13输出的光则进入光谱分析仪15,用于监测波长漂移的情况以检测被测物体的表面温度,从50/50光纤耦合器输出端口ⅱ14输出的另一束光经窄带带通滤波器16后进入第二光电探测器18以检测其强度p3;从微纳光纤耦合器端口ⅳ9输出的另一束光进入窄带带通滤波器16以便进行强度探测,其次经第一光电探测器17以检测其强度p4,接着经数字采集卡19将触觉信号采集至触觉信号智能处理子系统20上,以便做进一步的信号处理。通过监测光纤仿生传感器11的总输出强度p3 p4,即第一光电探测器17与第二光电探测器18分别探测的光纤仿生传感器11输出的光强度p3和p4的总和,即可实现检测触觉压力和触觉振动的目的。本实例中基于光纤触觉感知的智能仿生传感系统利用空分复用技术可实现同时检测被测物体表面温度、与被测物体相互作用的压力以及由滑动摩擦所致的振动,即同时实现人体皮肤的温度、触觉仿生功能。
[0115]
参照图5所示,本实施例提供触觉信号智能处理子系统20中基于触觉感知的被测物体表面纹理特征识别流程,将数字采集卡所采集的触觉信号经过小波变换以提取其振动信号的频率特征,接着利用机器学习算法将不同物体表面纹理特征所对应的不同频率特征信号进行分类并建立数据库,随后将所获得的触觉信号经特征提取后与数据库里的特征信号进行互相关运算以判断是否匹配,进而达到被测物体表面纹理特征识别的目的。
[0116]
以上所述,仅为本技术较佳的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。