技术特征:
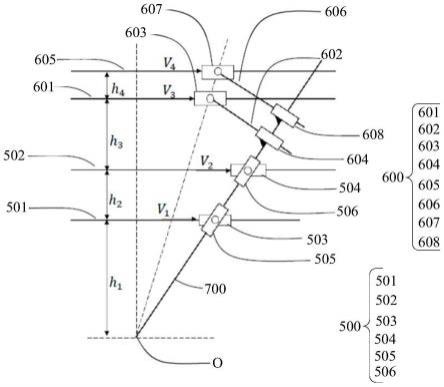
1.一种不动点机构,其特征在于,包括第一直线运动装置和第二直线运动装置;所述第一直线运动装置包括至少两个平行设置的第一直线运动机构,所述第一直线运动机构用以输出等比例的直线运动;所述第二直线运动装置包括至少两个相串联的第二直线运动机构,所述第二直线运动机构用以输出等比例的直线运动,至少一个所述第二直线运动机构与所述第一直线运动机构平行设置或部分重合设置。2.根据权利要求1所述的不动点机构,其特征在于,还包括末端执行装置;所述第一直线运动装置与所述末端执行装置滑动连接,以驱动所述末端执行装置摆动;所述第二直线运动装置与所述末端执行装置固定连接,以驱动所述末端执行装置伸缩;所述末端执行装置用于在所述第一直线运动装置和所述第二直线运动装置的共同作用下产生绕不动点的摆动。3.根据权利要求2所述的不动点机构,其特征在于,所述第一直线运动机构和所述第二直线运动机构均包括导轨以及用以在所述导轨上滑动的滑块;所述第一直线运动装置中的所有导轨平行设置;至少一个所述第二直线运动机构中的导轨与所述第一直线运动机构中的导轨平行设置或重合设置;所述末端执行装置与所述第一直线运动装置中的所有滑块滑动连接,并与所述第二直线运动装置中的对应滑块固定连接。4.根据权利要求3所述的不动点机构,其特征在于,所述第二直线运动装置中与所述第一直线运动机构平行或重合的导轨上的滑块与所述第二直线运动装置中的另外一个导轨铰接,所述末端执行部与所述第二直线运动装置中的所述另外一个导轨上的滑块固定连接。5.根据权利要求3所述的不动点机构,其特征在于,每个所述第一直线运动机构中的所述滑块包括相互铰接的滑块本体和滑动部,所述滑块本体在所述导轨上滑动,所述滑动部与所述末端执行装置滑动连接。6.根据权利要求3所述的不动点机构,其特征在于,所述第一直线运动机构的数量为两个,所述第二直线运动机构的数量为两个或大于两个的偶数个;当所述第二直线运动机构的数量为两个时,一个所述第二直线运动机构中的导轨与所述第一直线运动机构中的导轨平行或重合;当所述第二直线运动机构的数量为大于两个的偶数个时,至少两个所述第二直线运动机构中的导轨与所述第一直线运动机构中的导轨平行或重合。7.根据权利要求3所述的不动点机构,其特征在于,至少一个所述第二直线运动机构中的滑块的移动方向与所述末端执行装置的轴线垂直,所述末端执行装置的轴线经过所述不动点。8.根据权利要求1-7中任一项所述的不动点机构,其特征在于,所述第一直线运动装置被配置为用于同时输出具有第一速度值和第二速度值的移动,所述第一速度值与所述第二速度值的比值保持不变;所述第二直线运动装置被配置为用于同时输出具有第三速度值和第四速度值的移动,所述第三速度值与所述第四速度值的比值保持不变;其中所述第一速度值小于所述第二速度值,所述第三速度值小于或等于所述第四速度值。9.根据权利要求1-7中任一项所述的不动点机构,其特征在于,所述第二直线运动装置
设置在所述第一直线运动装置中的所述第一直线运动机构之间,或者,所述第一直线运动装置设置在所述第二直线运动装置的上方。10.一种机械臂,其特征在于,包括末端关节以及如权利要求1-9中任一项所述的不动点机构,所述不动点机构与所述末端关节连接。11.一种手术机器人,其特征在于,包括机械臂以及如权利要求1-9中任一项所述的不动点机构,所述不动点机构与所述机械臂连接。
技术总结
本发明涉及一种不动点机构、机械臂和手术机器人;手术机器人包括机械臂和与机械臂连接的不动点机构;不动点机构包括第一和第二直线运动装置;第一直线运动装置包括至少两个平行设置的第一直线运动机构,第二直线运动装置包括至少两个相串联的第二直线运动机构,至少一个第二直线运动机构与第一直线运动机构平行设置或部分重合设置;如此配置,可以提高不动点机构的结构刚度,并简化机械结构,提升运动控制精度,降低成本。降低成本。降低成本。
技术研发人员:ꢀ(74)专利代理机构
受保护的技术使用者:上海微创医疗机器人(集团)股份有限公司
技术研发日:2022.04.08
技术公布日:2022/8/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。