1.本发明涉及电气设计领域,尤其涉及一种智能充电桩控制系统及工作方法。
背景技术:
2.电动车是指以蓄电池作为辅助能源在普通车的基础上,安装了电机、控制器、蓄电池、转把闸把等操纵部件和显示仪表系统的机电一体化的个人交通工具。利用蓄电池存储的电能驱动电机转动,使电动车获得动能,具有方便、快捷、环保优势,是一种真正的绿色交通工具,逐渐成为我国的重要交通工具,极大的方便了广大人民的日常出行,目前国内保有量已达3亿辆以上。
3.电动车一般包括能源、动力和控制三大系统:能源系统主要为小型铅酸蓄电池,动力系统指电动机,控制系统包括车辆控制器以及相应的执行机构。三大系统中蓄电池的质量对电动车有着绝对的影响力,不仅是车辆行驶里程的决定性因素,也是日常家庭使用过程中容易发生火灾安全隐患的最主要原因。根据有关研究成果显示,影响电池寿命的主要因素是其充放电过程,其中充电过程对蓄电池的影响占比70%以上,电动车日常使用过程中发生的火灾安全隐患问题也集中体现在充电线缆过载或短路、蓄电池过充等充电过程。
4.传统的蓄电池充电控制方法有恒定电流法、恒定电压法、分段式充电法三种,随着数字控制算法技术的进步,脉冲式充电法、变电压变电流间歇充电法等现代充电方法逐渐发展起来,但仍存在充电模式不可调、蓄电池状态参数不掌握、设备控制技术无法迭代等问题,亟需加强电动车充电控制系统研究,提高智能化管理水平,对于预防电动车引发火灾,保护人身财产安全,维护公共安全具有重要意义。
技术实现要素:
5.为了实现电动车充电过程的智能高效控制,解决现有技术的不足之处,本发明的目的在于提供一种智能充电桩控制系统及工作方法,确保电动车的使用,满足行业发展趋势。
6.本发明提供了一种智能充电桩控制系统及工作方法;所述智能充电桩控制系统包括电源处理部件、核心控制部件、数据采集部件、智能服务部件,为蓄电池充电;所述电源处理部件由交流电源、半导体熔断器、ac/dc转换器组成,用于为蓄电池提供电源输入;所述核心控制部件由pic控制器、pwm驱动开关组成,用于数据处理,将采集信号进行数值运算并进行控制;数据采集部件由电压采集器、电流采集器和温度采集器组成,用于检测蓄电池充电电压、电流和温度,并反馈给pic控制器;智能服务部件由通讯模块、移动终端、云服务器组成,用于共享充电数据信息;系统通过控制优化实现电动车安全快速充电,并方便用户及运营企业监控充电状态。
7.优选地,所述电源处理部件的ac/dc转换器用于将220v交流电源调整为36v直流电;半导体熔断器为脱扣器电流10a的半导体无触头快速熔断器,用于确保充电系统发生短路时及时停止供电。
8.优选地,所述核心控制部件为pic控制部件,输入端分别与ac/dc转换器、电压电流及温度采集器连接,输出端与pwm驱动开关连接,基于模糊理论并结合采集信号对蓄电池充电过程进行控制优化,发出占空比d控制信号控制pwm驱动开关,为蓄电池充电,并且当温度采集器反馈温度超温时迅速切断驱动开关,确保充电安全。
9.优选地,所述数据采集部件的电流采集器为基于霍尔效应的hs06-p电流传感器,电压采集器为基于霍尔效应的hv16-p电压传感器,温度采集器为ds18b20温度传感器,分别采集蓄电池的电压、电流与温度信号并反馈给pic控制器。
10.优选地,所述智能服务部件通信模块、移动终端、云服务器组成;其中,所述通信模块用于传输充电过程电压、电流与温度信号与充电控制曲线;所述移动终端接收通信模块发送的数据信息用于用户实时查询;所述云服务器接收用户上传的电动自行车充电数据信息,用于运营企业获取充电大数据,进一步优化控制逻辑。
11.本发明还提供了一种采用智能充电桩控制系统的工作方法,所述方法包括如下步骤:
12.1)根据用户充电需求(快速充电、正常充电)确定充电方法(脉冲式充电法、变电压变电流间歇充电法);
13.2)利用电压采集器获取蓄电池初始电压u0并反馈pic控制器,根据充电电压对照表确定充电电压给定值u
g1
,并根据充电初始温度t0对蓄电池充电电压进行修正,得出最终目标值ug。
14.3)利用pic控制器根据初始电压u0评估蓄电池状态并计算pwm驱动开关初始占空比d0,驱动开关导通,经ac/dc转换器整流的36v直流电开始为电动车蓄电池充电;
15.4)利用电压、电流采集器测量蓄电池充电过程中的实时电压u、实时电流i;
16.5)利用温度采集器测量蓄电池充电时的初始温度t0以及过程中的实时温度t;
17.6)利用基于模糊控制原理的pic控制器分析采集的电压和电流数据u、i,计算变动差值δd并确定pwm驱动的响应占空比d,作为控制的输出反馈驱动开关,间接控制充电电压和充电电流;
18.7)利用pwm驱动开关根据控制信号对蓄电池充电电压uk和充电电流ik进行调整,实现蓄电池充电过程控制;
19.8)重复步骤6、步骤7,直至充电完成;
20.9)利用通讯模块实时传输充电过程数据信息到用户移动终端,并在用户同意的情况下上传至云服务器。
21.优选地,所述预设的基于模糊理论的电压控制计算规则包括:
22.e=u
g-u
ꢀꢀꢀ
(1)
23.ec=de/dt
ꢀꢀꢀ
(2)
[0024][0025]
[0026][0027][0028][0029]
其中,e表示所述电压的给定值ug与蓄电池实时电压u的差值,ec表示所述电压差值的变化率,ke表示所述电压差值量化因子,kec表示电压差值变化率量化因子,kd表示所述实际控制量量化因子,z0表示模糊计算过程中pwm波的占空比,d表示pwm驱动的实际控制量,z0经过尺度变换求得实际控制量d。
[0030]
同理,可以得到电流控制方法。
[0031]
由于环境温度对于蓄电池实际使用寿命影响明显,为优化充电控制目标,充电电压根据环境温度变化进行修正,计算规则如下:
[0032]
ug=u
g1-k
t
(t-25)
ꢀꢀꢀ
(8)
[0033]
其中,ug表示所述蓄电池经环境温度修正后的充电电压给定值,u
g1
表示所述蓄电池在25℃环境温度下的充电电压给定值,k
t
表示温度修正系数。
[0034]
优选地,所述工作方法的系统同步由时钟同步器进行控制完成,保证系统工作时的一致性。
[0035]
同现有技术相比,本发明的有益效果体现在:
[0036]
(1)本发明利用pic控制器基于模糊控制理论对电动自行车充电控制算法进行优化,并根据蓄电池采集的电压电流等数据对充电过程进行实时优化,具有智能高效,安全可靠等优点。
[0037]
(2)本发明利用霍尔电压传感器和霍尔电流传感器进行蓄电池电压电流检测,具有检测准确度高,故障率低等优点;利用温度采集器实时监测蓄电池温度并反馈给控制器,能够大大提高充电过程安全性,避免由于电池超温引起火灾。
[0038]
(3)本发明实现了电动车充电数据共享,便于用户及运营企业监控充电状态,利用大数据、人工智能技术对于电动车充电过程进行分析优化并反馈pic控制器实现针对性迭代,提高充电效率及安全性。
附图说明
[0039]
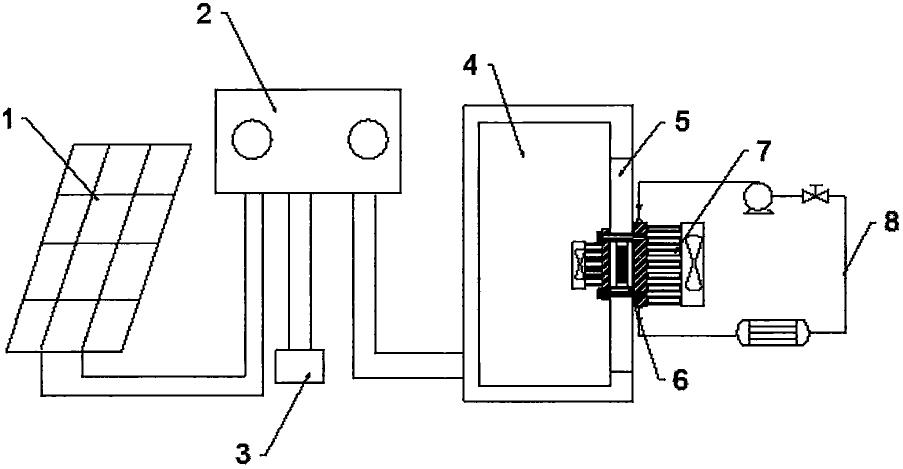
图1为本发明的一种智能充电桩控制系统的结构示意图;
[0040]
图2为本发明的一种智能充电桩控制系统的模糊控制结构图;
[0041]
图3为本发明的一种智能充电桩控制系统的工作方法流程图。
具体实施方式
[0042]
为了能够进一步了解本发明的结构、特征及其他目的,现结合所附较佳实施例附以附图详细说明如下,本附图所说明的实施例仅用于说明本发明的技术方案,并非限定本发明。
[0043]
首先,如图1所示为本发明的一种智能充电桩控制系统的结构示意图。所述智能充电桩控制系统包括电源处理部件、核心控制部件、数据采集部件、智能服务部件;所述电源处理部件由交流电源、半导体熔断器、ac/dc转换器组成,用于为蓄电池提供电源输入;所述核心控制部件由pic控制器、pwm驱动开关组成,用于数据处理,将采集信号进行数值运算并进行控制;数据采集部件由电压采集器、电流采集器和温度采集器组成,用于检测蓄电池充电电压、电流和温度,并反馈给pic控制器;智能服务部件由通讯模块、移动终端、云服务器组成,用于共享充电数据信息。
[0044]
所述电源处理部件的ac/dc转换器用于将220v交流电源调整为36v直流电;半导体熔断器为脱扣器电流10a的半导体无触头快速熔断器,用于确保充电系统发生短路时及时停止供电。
[0045]
所述核心控制部件为pic控制部件,输入端分别与ac/dc转换器、电压电流及温度采集器连接,输出端与pwm驱动开关连接,基于模糊理论并结合采集信号对蓄电池充电过程进行控制优化,发出占空比d控制信号控制pwm驱动开关,为蓄电池充电,并且当温度采集器反馈温度超温时迅速切断驱动开关,确保充电安全。
[0046]
所述数据采集部件的电流采集器为基于霍尔效应的hs06-p电流传感器,电压采集器为基于霍尔效应的hv16-p电压传感器,温度采集器为ds18b20温度传感器,分别采集蓄电池的电压、电流与温度信号并反馈给pic控制器。
[0047]
所述智能服务部件通信模块、移动终端、云服务器组成;其中,所述通信模块用于传输充电过程电压、电流与温度信号与充电控制曲线;所述移动终端接收通信模块发送的数据信息用于用户实时查询;所述云服务器接收用户上传的电动自行车充电数据信息,用于运营企业获取充电大数据,进一步优化控制逻辑。
[0048]
进一步的,如图2所示为本发明的一种智能充电桩控制系统的模糊控制器结构图。其中,所述电压差值e以及差值变动率ec为该二位模糊控制器的两个输入量;所述模糊控制表用于根据两个输入量的量化因子进行直积运算得到输出量z0;所述模糊控制器实际控制量d由输出量z0进行尺度变换后得出,用于控制蓄电池充电电压;所述电压采集器实时检测蓄电池电压u并反馈给模糊控制器。
[0049]
此外,如图3所示为本发明的一种智能充电桩控制系统的工作方法流程图,所述方法主要包括以下步骤:
[0050]
1)根据用户充电需求(快速充电、正常充电)确定充电方法(脉冲式充电法、变电压变电流间歇充电法);
[0051]
2)利用电压采集器获取蓄电池初始电压u0并反馈pic控制器,根据充电电压对照表确定充电电压给定值u
g1
,并根据充电初始温度t0对蓄电池充电电压进行修正,得出最终目标值ug。
[0052]
3)利用pic控制器根据初始电压u0评估蓄电池状态并计算pwm驱动开关初始占空比d0,驱动开关导通,经ac/dc转换器整流的36v直流电开始为电动车蓄电池充电;
[0053]
4)利用电压、电流采集器测量蓄电池充电过程中的实时电压u、实时电流i;
[0054]
5)利用温度采集器测量蓄电池充电时的初始温度t0以及过程中的实时温度t;
[0055]
6)利用基于模糊控制原理的pic控制器分析采集的电压和电流数据u、i,计算变动差值并确定pwm驱动的响应占空比d,作为控制的输出反馈驱动开关,间接控制充电电压和充电电流;
[0056]
7)利用pwm驱动开关根据控制信号对蓄电池充电电压uk和充电电流ik进行调整,实现蓄电池充电过程控制;
[0057]
8)重复步骤6、步骤7,直至充电完成;
[0058]
9)利用通讯模块实时传输充电过程数据信息到用户移动终端,并在用户同意的情况下上传至云服务器。
[0059]
另外,所述预设的基于模糊理论的电压控制计算规则包括:
[0060]
e=u
g-u
ꢀꢀꢀ
(1)
[0061]
ec=de/dt
ꢀꢀꢀ
(2)
[0062][0063][0064][0065][0066][0067]
其中,e表示所述电压的给定值ug与蓄电池实时电压u的差值,ec表示所述电压差值的变化率,ke表示所述电压差值量化因子,kec表示电压差值变化率量化因子,kd表示所述实际控制量量化因子,z0表示模糊计算过程中pwm波的占空比,d表示pwm驱动的实际控制量,z0经过尺度变换求得实际控制量d。
[0068]
同理,可以得到电流控制方法。
[0069]
由于环境温度对于蓄电池实际使用寿命影响明显,为优化充电控制目标,充电电压根据环境温度变化进行修正,计算规则如下:
[0070]
ug=u
g1-k
t
(t-25)
ꢀꢀꢀ
(8)
[0071]
其中,ug表示所述蓄电池经环境温度修正后的充电电压给定值,u
g1
表示所述蓄电池在25℃环境温度下的充电电压给定值,k
t
表示温度修正系数。
[0072]
最后,本发明的一种智能充电桩控制系统及工作方法,其具体的技术特点如下:
[0073]
(1)本发明利用pic控制器基于模糊控制理论对电动自行车充电控制算法进行优化,并根据蓄电池采集的电压电流等数据对充电过程进行实时优化,具有智能高效,安全可靠等优点。
[0074]
(2)本发明利用霍尔电压传感器和霍尔电流传感器进行蓄电池电压电流检测,具有检测准确度高,故障率低等优点;利用温度采集器实时监测蓄电池温度并反馈给控制器,能够大大提高充电过程安全性,避免由于电池超温引起火灾。
[0075]
(3)本发明实现了电动车充电数据共享,便于用户及运营企业监控充电状态,利用大数据、人工智能技术对于电动车充电过程进行分析优化并反馈pic控制器实现针对性迭代,提高充电效率及安全性。
[0076]
需要声明的是,上述发明内容及具体实施方式意在证明本发明所提供技术方案的实际应用,不应解释为对本发明保护范围的限定。本领域技术人员在本发明的精神和原理内,当可作各种修改、等同替换或改进。本发明的保护范围以所附权利要求书为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。