1.本发明涉及汽车性能分析技术领域,具体为一种汽车底盘下控制臂屈曲分析方法。
背景技术:
2.汽车下控制臂是底盘悬挂系统中的关键零部件,其作用是传递车轮和车架的力和力矩,同时承受通过路面传递给车身的冲击载荷,以保证车辆在行驶过程中的稳定性,在实际工作中,下控制臂作为关键零件,常受到压缩载荷的作用,其最常见的失效模式为屈曲失稳,故下控制臂在受到冲击载荷的情况下,不能发生屈曲变形,目前,在零件的设计阶段,产品的轻量化设计备受设计人员关注,传统的验证工作主要依赖于经验积累和试验模拟,时间长,增加下控制臂的检测成本,不利于下控制臂进行创新。
3.本发明的分析方法考虑材料的非线性以及几何非线性等因素,能够快速有效地分析下控制臂的屈曲强度以及准确地预测失效位置,可以使计算结果可视化,其计算结果数据可靠,对零件设计提供指导和优化方案,缩短开发周期,提高产品性能。
技术实现要素:
4.本发明的目的在于提供一种汽车底盘下控制臂屈曲分析方法,以解决上述背景技术中提出的传统的验证工作主要依赖于经验积累和试验模拟,时间长,增加下控制臂的检测成本,不利于下控制臂进行创新的问题。
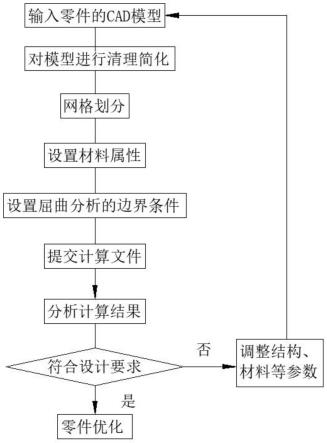
5.为实现上述目的,本发明提供如下技术方案:一种汽车底盘下控制臂屈曲分析方法,包括以下步骤:
6.步骤一、输入零件的cad模型:工作人员下控制臂cad模型导入前处理软件hypermesh中;
7.步骤二、对模型进行清理简化:工作人员在软件hypermesh内清理和简化下控制臂cad模型上具有影响的几何特征;
8.步骤三、网格分化:工作人员在软件hypermesh内对清理和简化后的下控制臂cad模型进行网格分化;
9.步骤四、设置材料属性:工作人员在软件hypermesh内输入下控制臂cad模型的材料属性;
10.步骤五、设置屈曲分析的边界条件:工作人员在软件hypermesh内设置下控制臂cad模型的边界条件;
11.步骤六、提交计算文件:工作人员在软件hypermesh内设置需要计算的条件并提交计算文件;
12.步骤七、分析计算结果:工作人员根据评判标准,验证计算出下控制臂的屈曲强度是否满足设计要求;
13.步骤八、零件优化:下控制臂cad模型的屈曲强度大于设计要求,则判断屈曲强度
过剩,可对下控制臂cad模型进行轻量化优化。
14.作为本发明的一种优选技术方案,所述步骤二中清理和简化下控制臂cad模型上具有影响的几何特征,去除下控制臂cad模型上细小的圆孔、下控制臂cad模型上凸台和下控制臂cad模型上的倒角,对下控制臂cad模型进行简化和清理,提高下控制臂cad模型的平整度。
15.作为本发明的一种优选技术方案,所述步骤三中下控制臂cad模型进行网格分化,把下控制臂cad模型映射到软件hypermesh内网格中去,对下控制臂cad模型进行网格化检查,将下控制臂cad模型网格化便于工作人员进行检查。
16.作为本发明的一种优选技术方案,所述步骤四中输入下控制臂cad模型的材料属性,工作人员在软件hypermesh内输下控制臂cad模型的厚度、下控制臂cad模型的角度、下控制臂cad模型的密度和下控制臂cad模型的长度,工作人员可以对下控制臂cad模型的材料属性自由设置。
17.作为本发明的一种优选技术方案,所述步骤五中设置下控制臂cad模型的边界条件,在下控制臂臂cad模型的三个硬点处设置节点集合,命名为外点、前内点和后内点,并在外点施加x向方向上的位移载荷且约束整个z方向自由度,在前内点约束xyz向的自由度,在后内点约束整车yz方向的自由度,三个硬点的受力方向和受力调节均可以自由设置。
18.作为本发明的一种优选技术方案,所述步骤六中设置需要计算的条件,设置下控制臂臂cad模型上硬点的受力条件,并编辑赋予材料的应力应变曲线,通过受力调节和应力应变曲线共同进行计算。
19.作为本发明的一种优选技术方案所述步骤六中提交计算文件,将编辑好的计算文件导入abaqus分析软件中进行求解,输出应力云图以及外点在x方向上的力与位移曲线图,通过力的峰值来提取下控制臂臂cad模型屈曲强度,工作人员参考力与位移曲线图提取下控制臂臂cad模型屈曲强度
20.与现有技术相比,本发明的有益效果是:该分析方法考虑材料的非线性以及几何非线性等因素,能够快速有效地分析下控制臂的屈曲强度以及准确地预测失效位置,可以使计算结果可视化,其计算结果数据可靠,对零件设计提供指导和优化方案,缩短开发周期,提高产品性能。
附图说明
21.图1为本发明的流程图;
22.图2为本发明下控制臂cad模型的示意图;
23.图3为本发明加载点受力与位移的曲线图。
具体实施方式
24.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.请参阅图1-3,本发明提供了一种汽车底盘下控制臂屈曲分析方法,包括以下步
骤:
26.步骤一、输入零件的cad模型:工作人员下控制臂cad模型导入前处理软件hypermesh中;
27.步骤二、对模型进行清理简化:工作人员在软件hypermesh内清理和简化下控制臂cad模型上具有影响的几何特征;
28.步骤三、网格分化:工作人员在软件hypermesh内对清理和简化后的下控制臂cad模型进行网格分化;
29.步骤四、设置材料属性:工作人员在软件hypermesh内输入下控制臂cad模型的材料属性;
30.步骤五、设置屈曲分析的边界条件:工作人员在软件hypermesh内设置下控制臂cad模型的边界条件;
31.步骤六、提交计算文件:工作人员在软件hypermesh内设置需要计算的条件并提交计算文件;
32.步骤七、分析计算结果:工作人员根据评判标准,验证计算出下控制臂的屈曲强度是否满足设计要求;
33.步骤八、零件优化:下控制臂cad模型的屈曲强度大于设计要求,则判断屈曲强度过剩,可对下控制臂cad模型进行轻量化优化。
34.步骤二中清理和简化下控制臂cad模型上具有影响的几何特征,去除下控制臂cad模型上细小的圆孔、下控制臂cad模型上凸台和下控制臂cad模型上的倒角,对下控制臂cad模型进行简化和清理,提高下控制臂cad模型的平整度。
35.步骤三中下控制臂cad模型进行网格分化,把下控制臂cad模型映射到软件hypermesh内网格中去,对下控制臂cad模型进行网格化检查,将下控制臂cad模型网格化便于工作人员进行检查。
36.步骤四中输入下控制臂cad模型的材料属性,工作人员在软件hypermesh内输下控制臂cad模型的厚度、下控制臂cad模型的角度、下控制臂cad模型的密度和下控制臂cad模型的长度,工作人员可以对下控制臂cad模型的材料属性自由设置。
37.步骤五中设置下控制臂cad模型的边界条件,在下控制臂臂cad模型的三个硬点处设置节点集合,命名为外点、前内点和后内点,并在外点施加x向方向上的位移载荷且约束整个z方向自由度,在前内点约束xyz向的自由度,在后内点约束整车yz方向的自由度,三个硬点的受力方向和受力调节均可以自由设置。
38.步骤六中设置需要计算的条件,设置下控制臂臂cad模型上硬点的受力条件,并编辑赋予材料的应力应变曲线,通过受力调节和应力应变曲线共同进行计算。
39.步骤六中提交计算文件,将编辑好的计算文件导入abaqus分析软件中进行求解,输出应力云图以及外点在x方向上的力与位移曲线图,通过力的峰值来提取下控制臂臂cad模型屈曲强度,工作人员参考力与位移曲线图提取下控制臂臂cad模型屈曲强度。
40.根据上述记载可知本发明,工作人员下控制臂cad模型导入前处理软件hypermesh中,工作人员在软件hypermesh内清理和简化下控制臂cad模型上具有影响的几何特征,例如,下控制臂cad模型上细小的圆孔、下控制臂cad模型上凸台和下控制臂cad模型上的倒角,对下控制臂cad模型进行简化和清理,提高下控制臂cad模型的平整度,工作人员在软件
hypermesh内对清理和简化后的下控制臂cad模型进行网格分化,把下控制臂cad模型映射到软件hypermesh内网格中去,对下控制臂cad模型进行网格化检查,将下控制臂cad模型网格化便于工作人员进行检查,工作人员在软件hypermesh内输入下控制臂cad模型的材料属性,例如,下控制臂cad模型的厚度、下控制臂cad模型的角度、下控制臂cad模型的密度和下控制臂cad模型的长度,工作人员可以对下控制臂cad模型的材料属性自由设置,工作人员在软件hypermesh内设置下控制臂cad模型的边界条件,在下控制臂臂cad模型的三个硬点处设置节点集合,命名为外点、前内点和后内点,并在外点施加x向方向上的位移载荷且约束整个z方向自由度,在前内点约束xyz向的自由度,在后内点约束整车yz方向的自由度,三个硬点的受力方向和受力调节均可以自由设置,工作人员在软件hypermesh内设置需要计算的条件并提交计算文件,工作人员将编辑好的计算文件导入abaqus分析软件中进行求解,输出应力云图以及外点在x方向上的力与位移曲线图,通过力的峰值来提取下控制臂臂cad模型屈曲强度,工作人员参考力与位移曲线图提取下控制臂臂cad模型屈曲强度,工作人员根据评判标准,验证计算出下控制臂的屈曲强度是否满足设计要求,下控制臂cad模型的屈曲强度大于设计要求,则判断屈曲强度过剩,可对下控制臂cad模型进行轻量化优化,屈曲强度小于设计要求,则判断屈曲强度不足,需改进。
41.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。