1.本发明涉及图像的三维重建技术领域,特别是一种基于贴片轮廓信息的筒体重建方法及系统。
背景技术:
2.三维重建技术目的在于从二维图像中恢复出三维图形,能够解释出图像中各物体间的空间位置关系,现有的三维重建技术主要利用获取到的目标场景或物体的深度信息,经过点云数据的配准与融合来实现景物的三维还原,由于贴片铺贴机构中筒体上贴片较为密集,且筒体上每个贴片大小形状一致,颜色与筒体相近,现有的三维重建技术在该问题的实施过程中需要大量包含深度信息的点云数据,导致其计算量过大,影响了检测过程的工作效率,同时现有技术对于环境、光源等要求较高,抗干扰性不强,容易受到噪声的影响,也会导致筒体的三维重建失败。
技术实现要素:
3.有鉴于此,本发明的目的在于提供一种基于贴片轮廓信息的筒体重建方法及系统,该方法能够通过二维图像快速还原贴片铺贴机构中筒体的三维模型,且能够解释筒体上贴片的相对位置关系,从而能直观地描述筒体贴片的缺失情况以及贴片间的间隙大小。
4.为达到上述目的,本发明提供如下技术方案:
5.本发明提供的基于贴片轮廓信息的筒体重建方法,包括以下步骤:
6.采集筒体按照转动角度α转动后的贴片轮廓图像数据;并计算每次采集到的贴片轮廓图像数据中贴片的轮廓,然后计算贴片轮廓重心坐标;
7.将筒体转动一个周期内每转动角度α采集到图片所得到的重心坐标依次存储在坐标矩阵pj中,所述坐标矩阵中的每个元素与图像坐标系中贴片轮廓重心坐标一一对应;
8.或
9.采集筒体按照上升方向或下降方向移动h后的贴片轮廓图像数据;并计算每次采集到的图像中贴片的轮廓数据,然后计算贴片轮廓重心坐标;
10.将在上升方向或下降移动h后筒体转动一个周期内采集到图片所得到的重心坐标依次存储在坐标矩阵pj中,所述坐标矩阵中的每个元素与图像坐标系中贴片轮廓重心坐标一一对应;
11.进一步,所述贴片轮廓重心坐标按照以下步骤进行计算:
12.s1:采集贴片轮廓图像数据,确定起始位置采集图片每排的贴片数最大值n;
13.s2:预处理轮廓图像数据;
14.s3:提取贴片轮廓;
15.s4:计算每个轮廓重心坐标。
16.进一步,所述采集筒体按照转动角度α转动后的贴片轮廓图像数据按照以下步骤进行:
17.s3:设置筒体转动角度α;
18.将筒体转动一周记为一个周期ti,一个周期ti内回转体每转动α摄像机采集一次图片,每转动α采集一次图片,每次采集图片顺序保存至图片集中,一个周期ti内共采集j张图片;
[0019][0020]
其中,n为摄像机在起始位置采集的图片每排识别的贴片数最大值;n为筒体每排贴片数的额定值。
[0021]
s4:筒体每转动α,计算贴片轮廓重心坐标,直至一个周期ti结束。
[0022]
进一步,所述坐标矩阵pj按照以步骤确定:
[0023]
周期ti内的重建以采集初始位置开始,即从坐标矩阵p0开始。
[0024]
p1中元素紧随着p0中的元素拼接得到重建后的坐标矩阵p
′1,以此类推得到各重建后的坐标矩阵p
′j,即:
[0025]
p
′j=jam×n pj;
[0026]
其中,d为采集图片的宽度像素值;
[0027]
得到一个周期ti内重建的坐标矩阵:
[0028][0029]
进一步,所述采集筒体按照上升方向或下降移动h后的贴片轮廓图像数据按照以下步骤进行:
[0030]
筒体向上或向下移动距离h,记图像采集初始位置周期为t0,若t0周期结束后,筒体向上移动,即采集图片相对初始位置向下移动,即沿图像坐标系y轴正向移动,筒体转动一周记为周期ti,(i》0);或
[0031]
筒体向下移动,采集图片相对初始位置向上移动,沿图像坐标系y轴负方向移动,记ti,(i《0),其中i为上下移动的次数,筒体从起始位置向一个方向移动,若当i=i
max
后,筒体回到i=0处沿另一方向移动直至i=i
min
;
[0032]
筒体每上下移动距离h,每完成一次周期ti内的重建,重复进行直至移动的总距离数等于筒体总长度像素值h,记移动次数为k,其中,k=i
max-i
min
。
[0033]
进一步,所述竖直方向上坐标重建,步骤如下:
[0034]
根据每个周期内重建的坐标矩阵pi进行回转体竖直方向上的重建;
[0035]
重建后的坐标矩阵:
[0036]
p
′i=ibm×n pi;
[0037]
其中,
[0038]
l为采集图片的高度像素值,若t0周期结束后,筒体向上移动,i》0;若t0周期结束后,回转体向下移动,i《0。
[0039]
进一步,所述贴片重心坐标矩阵如下:
[0040][0041]
其中,矩阵m即为以摄像机采集图片初始位置为起点重建的贴片重心坐标矩阵。
[0042]
进一步,所述根据重建后的重心坐标矩阵m计算筒体上每个贴片的相对位置,然后在像素值大小为(k
·
h)
×
(j
·
d)的矩形上标识矩阵m中每个点的位置。
[0043]
进一步,还包括以下步骤:
[0044]
以矩形边长为k
·
h的边作为高,大小为j
·
d的边作为底面周长将该矩形还原成筒体,以矩形上每个点为贴片的建模中心,由于每个贴片大小、形状相同,在轮廓重心坐标处即矩形上的点,建立与实际贴片大小形状一致的模型。
[0045]
本发明提供的基于贴片轮廓信息的筒体重建系统,该系统包括存储单元和处理单元,所述存储单元中存储可在所述处理单元上运行的计算机程序,所述处理单元执行所述计算机程序时实现如上述的基于贴片轮廓信息的筒体重建方法。
[0046]
本发明的有益效果在于:
[0047]
本发明提供的基于贴片轮廓信息的筒体重建方法及系统,该方法通过不同转动角度或移动距离的采集图像来计算贴片轮廓重心坐标,从而重建破片铺贴机构中筒体;该方法能够根据贴片表面重心坐标还原筒体,该方法够通过二维图像快速还原贴片铺贴机构中筒体的三维模型,解释筒体上贴片的相对位置关系,从而能直观地描述筒体贴片的缺失情况以及贴片间的间隙大小,得到筒体贴片的缺失情况以及贴片间的间隙大小。
[0048]
本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
[0049]
为了使本发明的目的、技术方案和有益效果更加清楚,本发明提供如下附图进行说明:
[0050]
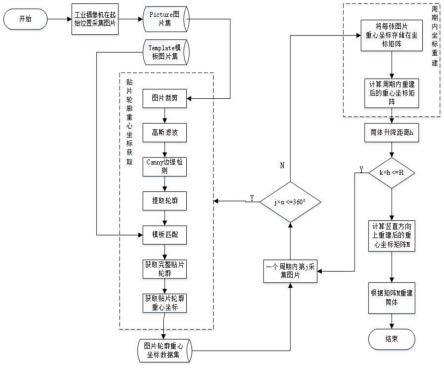
图1为方法整体流程图。
[0051]
图2为初始图片效果图。
[0052]
图3为筒体贴片图像坐标系示意图。
[0053]
图4为重心坐标矩阵m标示贴片相对位置示意图。
[0054]
图5为重建后筒体结构示意图。
具体实施方式
[0055]
下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好的理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
[0056]
实施例1
[0057]
如图1所示,本实施例提供的基于贴片轮廓信息的筒体重建方法,首先,通过工业
摄像机在起始位置采集图片,存储于picture图片集,对图片剪裁,高斯滤波,canny边缘检测,提取轮廓,然后结合template模板图片集,进行模板匹配,获取完整贴片轮廓,获取贴片轮廓重心坐标,完成整个贴片轮廓重心坐标获取过程,得到图片轮廓重心坐标数据集,在一个周期内,将每个图片的重心坐标存储到坐标矩阵中,并计算周期内重建后的重心坐标矩阵,完成周期内坐标重建过程,再根据筒体在一个周期内的升降距离计算竖直方向上的重心坐标,并计算重建后的重心坐标矩阵,最后根据矩阵重建筒体模型。
[0058]
本实施例提供的基于贴片轮廓信息的筒体重建方法,具体过程按照以下步骤进行:
[0059]
步骤1:在起始位置采集第一张图片,记录摄像机在起始位置采集的图片每排识别的贴片数最大值n。初始图片效果图如图2所示,图2为初始图片效果图;
[0060]
贴片轮廓重心坐标的获取:
[0061]
步骤2:图片预处理。通过工业摄像机采集图片,由于工业摄像头拍摄到的图片区域偏大,且回转体两侧部分存在一定的畸变,在进行图像处理之前需要对图片进行裁剪,对采集图片h
×
d像素值的固定像素区域进行处理检测。对图片进行轮廓检测前的预处理工作,利用高斯滤波去除部分噪声,并保留贴片的边缘信息。
[0062]
步骤3:轮廓检测。在进行降噪处理后,利用canny算子进行边缘检测,并绘制检测出的轮廓,由于经过上述边缘检测得到的轮廓存在轮廓不完整、未闭合等情况,所以绘制的轮廓不能直接应用于筒体重建,在canny边缘检测的基础上利用template模板图片集的标准贴片轮廓图片进行模板匹配,从而得到完整的贴片轮廓。
[0063]
步骤4:轮廓重心坐标。得到完整的贴片轮廓后,利用重心坐标公式计算图片中每个轮廓的重心坐标像素值。
[0064]
步骤5:计算周期内筒体转动角度α。
[0065]
将筒体转动一周记为一个周期ti,一个周期ti内回转体每转动α摄像机采集一次图片,每转动α采集一次图片,每次采集图片顺序保存至图片集中,一个周期ti内共采集j张图片。
[0066][0067]
其中,n为摄像机在起始位置采集的图片每排识别的贴片数最大值;n为筒体每排贴片数的额定值。
[0068]
步骤6:筒体每转动α,重复步骤2~4,直至一个周期ti结束。
[0069]
筒体贴片重建步骤:
[0070]
建立图像坐标系,如图3所述,图3为筒体贴片图像坐标系示意图;
[0071]
1.周期ti内重建:
[0072]
步骤7:
[0073]
将一个周期内摄像机顺序采集到第j张图片所得到的重心坐标存储在坐标矩阵pj中,矩阵中的每个元素与上述图像坐标系中贴片轮廓重心坐标一一对应。
[0074]
[0075]
其中,m,n分别为图片中贴片的行数和列数,
[0076]
表示第j张图片中第m行,第n列的贴片轮廓重心坐标。
[0077]
表示第j张图片中第m行,第n列的贴片轮廓重心的横坐标。
[0078]
表示第j张图片中第m行,第n列的贴片轮廓重心的纵坐标。
[0079]
步骤8:
[0080]
周期ti内的重建以摄像机初始摄像位置开始,即从坐标矩阵p0开始。
[0081]
p1中元素紧随着p0中的元素拼接得到重建后的坐标矩阵p
′1,以此类推得到各重建后的坐标矩阵p
′j,即:
[0082]
p
′j=jam×n pj;
[0083]
其中,d为采集图片的宽度像素值;
[0084]
j表示当前周期内采集的贴片轮廓图片序号。
[0085]
pj表示第j张图片的贴片轮廓重心坐标矩阵。
[0086]
(d,0)表示水平变换坐标,其中d为图片宽度像素值。
[0087]am
×n表示水平坐标变换矩阵。
[0088]
得到一个周期ti内重建的坐标矩阵:
[0089][0090]
其中,pi表示周期ti内所有贴片轮廓重心坐标组成的矩阵。
[0091]
p0表示摄像机初始位置处采集图片得到的贴片轮廓重心坐标矩阵。
[0092]
2.筒体竖直方向上重建
[0093]
步骤9:
[0094]
筒体升降。
[0095]
为了重建整个筒体贴片情况,在一个周期ti结束后筒体应向上或向下移动距离h,记图像采集初始位置周期为t0,若t0周期结束后,筒体向上移动,即摄像机采集图片相对初始位置向下移动,即沿图像坐标系y轴正向移动,记ti,(i》0);同理,若t0周期结束后,筒体向下移动,即摄像机采集图片相对初始位置向上移动,即沿图像坐标系y轴负方向移动,记ti,(i《0),其中i为上下移动的次数,(筒体从起始位置只能向一个方向移动,若当i=i
max
后,筒体回到i=0处沿另一方向移动直至i=i
min
。)
[0096]
步骤10:
[0097]
筒体每上下移动距离h,即每完成一次周期ti内的重建,重复步骤5~9,直至移动的总距离数等于筒体总长度像素值h,记移动次数为k,其中k=i
max-i
min
。
[0098]
步骤11:竖直方向上坐标重建。
[0099]
根据每个周期内重建的坐标矩阵pi进行回转体竖直方向上的重建。
[0100]
重建后的坐标矩阵:
[0101]
p
′i=ibm×n pi;
[0102]
其中,
[0103]
其中,bm×n表示竖直坐标变换矩阵。
[0104]
l为采集图片的高度像素值,若t0周期结束后,筒体向上移动,i》0;若t0周期结束后,回转体向下移动,i《0。
[0105][0106]
故矩阵m即为以摄像机采集图片初始位置为起点重建的贴片重心坐标矩阵。
[0107]
步骤12:
[0108]
根据重建后的重心坐标矩阵m可以知道筒体上每个贴片的相对位置,然后在像素值大小为(k
·
h)
×
(j
·
d)的矩形上标识矩阵m中每个点的位置,如图4所示。
[0109]
图4为重心坐标矩阵m标示贴片相对位置示意图
[0110]
步骤13:
[0111]
以矩形边长为k
·
h的边作为高,大小为j
·
d的边作为底面周长将该矩形还原成筒体。以矩形上每个点为贴片的建模中心,由于每个贴片大小、形状完全相同,故在轮廓重心坐标处即矩形上的点,建立与实际贴片大小形状一致的模型,重建筒体。重建后的筒体如图5所示,图5为重建后筒体结构示意图。
[0112]
实施例2
[0113]
本实施例基于贴片轮廓信息的筒体重建系统,该系统包括存储单元和处理单元,所述存储单元中存储可在所述处理单元上运行的计算机程序,所述处理单元执行所述计算机程序时实现上述的基于贴片轮廓信息的筒体重建方法。
[0114]
以上所述实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。