技术特征:
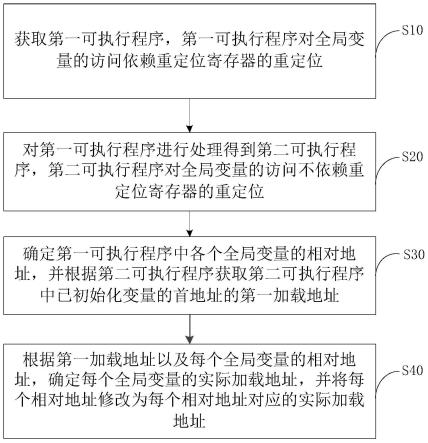
1.一种基于加权平均曲率滤波分解的遥感图像融合方法,其特征在于,包括以下步骤:s1、计算多光谱强度分量:采用基于局部空间频率的自适应加权平均方法,用于将多光谱图像各波段融合生成强度分量i,加权局部空间频率利用水平、垂直以及主副对角线方向的八邻域内的多个像素点,依据距离中心像素的欧氏距离赋予不同的权重,加权之后再参与计算,根据加权局部空间频率设计自适应加权平均的系数ω
i
,具体如下所示:,具体如下所示:其中n是多光谱图像的波段,wlsf
i
表示多光谱图像第i个波段在(x,y)位置处的加权局部空间频率值,ms
i
(x,y)表示多光谱图像第i个波段在(x,y)位置的像素值,ω
i
(x,y)表示多光谱图像第i个波段在(x,y)位置的加权系数,i(x,y)表示强度分量i在(x,y)位置处的像素值;s2、光谱估计:将i作为初始α通道,根据下列公式计算前景图像f和背景图像b,后续利用f、b进行图像重构:其中i是第i颜色通道,α
ix
和α
iy
值是光谱前景f
k
、光谱背景b
k
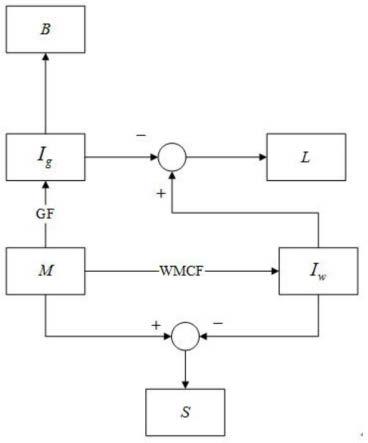
和α的水平和垂直导数;s3、多尺度分解:利用加权平均曲率滤波(wmcf)和高斯滤波(gf)对全色图像进行多尺度分解,得到大尺度图像l、小尺度图像s和基本图像b,通过这种分解方法,将输入图像分解成三个不同尺度的子图像,分解过程为利用wmcf和gf对输入图像m进行处理,分别获得滤波图像i
w
和i
g
,通过m和i
w
的差值得到小尺度图像,大尺度图像是差分结果:i
g
=gf(m,σ,ρ).
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)i
w
=wmcf(m,p).
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)s=m-i
w
.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)l=i
w-i
g
.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)b=i
g
.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8);s4、分量融合:利用图像的局部能量e来动态调节连接系数β的大小,根据图像的特征自适应变化保留图像边缘的特征信息,自适应连接系数β描述为:其中,e(x,y)表示(x,y)处的局部能量,β
xy
表示(x,y)处的连接系数,局部能量的计算具体描述如下:其中c(x,y)表示图像在(x,y)处的像素值,w为加权系数矩阵,具体细节如下:
将加权局部空间频率值作为脉冲耦合神经网络的输入,利用图像的局部能量e来动态调节连接系数β的大小,根据图像的特征自适应变化,当达到最大迭代次数时,迭代停止,得到强度分量i的点火次数总和t
b
和基本图像b的点火次数总和,根据点火次数总和取大原则进行融合,如下式所示:其中fa(x,y)代表融合图像fa在(x,y)位置的像素值,i(x,y)代表强度分量i在(x,y)位置的像素值,b(x,y)代表基本图像b在(x,y)位置的像素值,最终,通过加权局部空间频率引导的脉冲耦合神经网络融合基本图像b和强度分量i得到融合图像fa;s5、图像重构:通过s、l和fa的线性组合重建融合后的图像fb作为最终的α通道,根据如下公式,组合α、f和b进行重构,得到最终的融合结果:i
i
=α
i
f
i
(1-α
i
)b
i
ꢀꢀꢀꢀꢀꢀꢀꢀ
(13)。2.根据权利要求1所述的一种基于加权平均曲率滤波分解的遥感图像融合方法,其特征在于:所述步骤s2根据图像抠图模型,通过线性合成模型将输入图像区分为前景图像f和背景图像b,即第i个像素的颜色是对应的前景颜色和背景颜色的线性组合:i
i
=α
i
f
i
(1-α
i
)b
i
ꢀꢀꢀꢀꢀꢀꢀꢀ
(14)其中f
i
是第i个像素的前景颜色,b
i
是第i个像素的背景颜色,其中,α是前景图像f的不透明度,根据图像抠图模型的局部线性假设,如果α包含该图像的大部分边缘信息,则该图像的对应的光谱前景和背景色在空间上是平滑的,在确定输入图像和α的同时,通过求解以下函数估计前景图像f和背景图像b:其中i是第i颜色通道,α
ix
和α
iy
值是光谱前景f
j
、光谱背景b
j
和α的水平和垂直导数。3.根据权利要求1所述的一种基于加权平均曲率滤波分解的遥感图像融合方法,其特征在于,所述步骤s4中脉冲耦合神经网络模型具体为:标准的pcnn模型由以下公式描述:标准的pcnn模型由以下公式描述:u
ij
[n]=f
ij
[n](1 βl
ij
[n]).
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(18)(18)
t
ij
[n]用于阈值调节,u
ij
[n]用于产生调制信号与阈值进行比较产生脉冲信号y
ij
[n],共有9个参数,9个参数分属四类:时间衰减常数、放大系数、连接系数以及权值矩阵,时间衰减常数为α
f
,α
l
,α
θ
,这三个参数分别来自输入域f、连接输入域l以及动态门限t,α
f
,α
l
控制着f,l通道信号的衰减速度,α
θ
控制着阈值衰减的速度,放大系数为v
f
、v
l
、v
e
,这三个参数分别是输入域f、连接输入域l以及动态门限t的放大系数,连接系数β来自调制域u起到调节神经元之间相互影响的作用,同时该参数还影响着中心神经元的点火周期,权值矩阵为w、m,这两个参数分别来自输入域f、连接输入域l,矩阵中的元素表示神经元之间的连接强弱关系;接收域f接收外部刺激s、自身的刺激f
ij
[n-1],l接收周围神经元的刺激,调制域针对接收域的信号f和l进行调制得到内部活动项u,将脉冲产生域神经元对应位置的内部活动项u与动态阈值t
ij
进行比较,若u
ij
>t
ij
,则脉冲发生器启动神经元点火输出y
ij
=1,否则神经元不点火,输出y
ij
=0,得到最后结果y,上述过程不断重复,直到满足条件为止。4.根据权利要求1所述的一种基于加权平均曲率滤波分解的遥感图像融合方法,其特征在于,所述步骤s1和s4中加权局部空间频率具体为:传统的空间频率描述水平和垂直两个方向的空间信息,传统的空间频率计算如下式:其中,rf、cf分别是行频率、列频率,rf、cf包含水平、垂直两个方向;对空间频率的计算进行改进,在原有基础上增加对角方向的计算,此外,基于欧几里得度量,确定行、列频率的加权系数为改进后的空间频率称为加权局部空间频率(wlsf),用于反映各像素邻域范围内的活跃程度,wlsf同时包含行、列和对角方向,对八个方向的空间频率进行加权求和,加权局部空间频率反映各像素邻域范围内的活跃程度,加权局部空间频率的计算公式如下:其中,rf、cf和df分别是行频率、列频率和对角频率,rf、cf包含水平、垂直两个方向,df包含正副对角线方向,具体定义如下:rf=rf1 rf2,cf=cf1 cf2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(23)df=df1 df2 df3 df4ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(24)(24)(24)(24)
其中,(2m 1)(2n 1)代表局部区域的大小,f(x,y)代表(x,y)位置处的像素值。5.根据权利要求1所述的一种基于加权平均曲率滤波分解的遥感图像融合方法,其特征在于,所述步骤s3中加权平均曲率具体为:图片u的加权平均曲率(wmc)定义为:对于二维图像即n=2,该等式变为:其中δ是各向同性拉普拉斯算子,u
x
和u
y
是x和y方向的偏导数,u
xy
是相应的二阶偏导数;对于3
×
3窗口,考虑8个法线方向和半窗口,8种情况产生相应的内核:根据8个内核计算出八个距离:
其中*表示卷积操作,加权平均曲率的离散形式表示为:h
w
≈d
k
,k=argmin{|d
i
|;i=1,2,...,8}.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(37)wmcf的简化过程表示为:i
out
=wmc(i
in
).
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(38)其中i
in
和i
out
是输入和滤波后的图像,wmc(
·
)表示wmcf操作。
技术总结
本发明公开了一种基于加权平均曲率滤波分解的遥感图像融合方法采用自适应加权平均方法,将多光谱图像各波段融合生成强度分量I。将强度分量I作为初始α通道进行光谱估计,得到前景色F和背景色B。通过加权平均曲率滤波和高斯滤波将全色图像分解为小尺度图像、大尺度图像和基本图像。利用图像的局部能量动态调节连接系数的大小。通过脉冲耦合神经网络融合强度分量I和基本图像。将融合后的图像以及大尺度图像、小尺度图像线性组合在一起构造最终的α通道。根据图像抠图模型,将前景色F和背景色B、最终的α通道进行重构,得到融合图像。本发明通过与十种典型的融合方法进行比较,在主观视觉效果和客观评价方面都取得较好的结果。视觉效果和客观评价方面都取得较好的结果。视觉效果和客观评价方面都取得较好的结果。
技术研发人员:刘丹凤 潘月涛 王立国 邢世帅 岳晓晗 孟灵鸿
受保护的技术使用者:大连民族大学
技术研发日:2022.06.10
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。