技术特征:
1.一种方法,包括-在lidar测量设备(101,102,103)的处理电路(1011)处,接收点云数据集(191,192,193,501,501*,502)的多个数据点(51-73),点云数据集(191,192,193,501,501*,502)的多个数据点(51-73)中的每个数据点指示各自的深度位置(601),点云数据集(191,192,193,501,501*,502)的多个数据点(51-73)中的不同数据点(51-73)与lidar测量设备(101,102,103)的视野(602)中的不同横向位置相关联,每个横向位置与相应的预定义参考深度阈值(201,202,203,204)相关联,-在lidar测量设备(101,102,103)的处理电路(1011)处,并且对于点云数据集(191,192,193,501,501*,502)的多个数据点(51-73)中的每个数据点:执行由相应数据点指示的深度位置(601)与相应参考深度阈值(201,202,203,204)的相应比较,当相应比较得出由相应数据点指示的深度位置(601)基本上等于相应的参考深度阈值(201,202,203,204)时,选择性地丢弃相应数据点,并且-在lidar测量设备(101,102,103)的处理电路(1011)处,并且在所述选择性丢弃时,将点云数据集(191,192,193,501,501*,502)输出到与通信链路(108)连接的、lidar测量设备(101,102,103)的外部接口(1013)。2.如权利要求1的方法,其中,点云数据集(191,192,193,501,502)在所述丢弃之前对视野(602)进行密集采样,其中,点云数据集(191,192,193,501*,502)在所述丢弃之后对视野(602)进行稀疏采样。3.如权利要求1或2的方法,还包括:-对于多个数据点(51-73)中的每个数据点:确定一个或多个参考点云数据集(191,192,193,501,501*)中各个数据点的深度位置(601)的最大值,并根据该最大值确定相应的参考深度阈值(201,202,203,204)。4.如前述权利要求中任一项的方法,其中一个或多个参考点云数据集(191,192,193,501,501*)包括多个参考点云数据集(191,192,193,501,501*),其中该方法还包括:-对于多个数据点(51-73)中的每个数据点:确定跨多个参考点云数据集(191,192,193,501,501*,502)的各个数据点的深度位置(601)的直方图,并基于直方图确定相应的参考深度阈值(201,202,203,204)。5.如权利要求3或4的方法,其中一个或多个参考点云数据集(191,192,193,502)包括多个参考点云数据集(191,192,193,502),其中由lidar测量设备(101,102,103)获取包含所述点云数据集(191,192,193,501,501*,502)的一个点云数据集(191,192,193,501,501*,502)的序列(500),其中该方法还包括:-使用时域滑动窗口从所述点云数据集(501,501*,502)的序列(500)中选择多个参考点云数据集(191,192,193,501,501*)。
6.如前述权利要求中任一项的方法,其中,所述选择性地丢弃多个数据点(51-73)中的给定数据点(51-73)是基于:由给定数据点(51-73)指示的深度位置(601)的相应比较,和由多个数据点(51-73)中的一个或多个其他数据点(51-73)指示的深度位置(601)的一个或多个其他比较,所述其他数据点与关联于给定数据点(51-73)的横向位置相邻的横向位置相关联。7.如前述权利要求中任一项的方法,还包括:-响应于检测到多个数据点(51-73)的数据点(51-73)的预定义计数的相应比较,得出由这些数据点(51-73)指示的深度位置(601))基本上不等于相应的参考深度阈值(201,202,203,204),触发lidar测量设备(101,102,103)的故障模式。8.如前述权利要求中任一项的方法,还包括:-在lidar测量设备(101,102,103)的处理电路(1011)处:检测到,点云数据集(191,192,193,501,501*,502)为预定义了有限的相应参考深度阈值(201,202,203,204)的给定横向位置指示一个未定义的深度位置(601),-向点云数据集(191,192,193,501,501*,502)添加指示该未定义深度位置(601)的占位符数据结构(280)。9.如权利要求8的方法,其中占位符数据结构(280)指示基于与所述给定横向位置相关联的参考深度阈值(201,202,203,204)确定的深度位置(601)的候选范围。10.如权利要求8或9的方法,其中,在相关参考深度阈值(201,202,203,204)取有限值时,占位符数据结构(280)选择性地添加到点云数据集(191,192,193,501,501*,502)。11.如前述权利要求中任一项的方法,还包括:-在服务器(109)处从lidar测量设备(101,102,103)并通过通信链路(108)接收点云数据集(191,192,193,501,501*,502),和-在服务器(109)处基于点云数据集(191,192,193,501,501*,502)执行对象检测。12.如权利要求11的方法,还包括:-在服务器(109)处从一个或多个另外的lidar测量设备(101,102,103)接收一个或多个另外的点云数据集(191,192,193,501,501*,502),其中对象检测是基于点云数据集(191,192,193,501,501*,502)和一个或多个另外的点云数据集(191,192,193,501,501*,502)的多视角对象检测。13.如权利要求8至11中任一项以及权利要求11或12的方法,其中,对象检测基于点云数据集(191,192,193,501,501*,502)中包括的占位符数据结构(280)而确定低反射率对象(302)存在的可能性。14.如权利要求9和13的方法,其中对象检测确定对象(302)的对象边缘(353)处于深度位置(601)的候选范围内,并且基于在一个或多个进一步的第二点云数据集中检测到的至少一个另外的对象边缘(351,355)。15.如前述权利要求中任一项的方法,还包括:-向连接到通信链路(108)的lidar测量设备(101,102,103)的外部接口(1013)输出指
示与lidar测量设备(101,102,103)的视野(602)中的横向位置相关联的参考深度阈值(201,202,203,204)的一个或多个控制消息。16.如前述权利要求中任一项的方法,其中的比较考虑了容差(299),其中容差取决于lidar测量设备(101,102,103)的一个或多个当前运行条件。17.一种lidar测量设备的处理电路,配置为:-接收点云数据集(191,192,193,501,501*,502)的多个数据点(51-73),所述点云数据集(191,192,193,501,501*,502)的多个数据点(51-73)中的每个数据点指示相应深度位置(601),所述点云数据集(191,192,193,501,501*,502)的多个数据点(51-73)中的不同数据点(51-73)与lidar测量设备(101,102,103)的视野(602)中的不同横向位置相关联,每个横向位置与各自的预定义参考深度阈值(201,202,203,204)相关联,-对于点云数据集(191,192,193,501,501*,502)的多个数据点(51-73)中的每个数据点:执行由相应数据点指示的深度位置(601)与相应参考深度阈值(201,202,203,204)的相应比较,并当该相应比较得出由相应数据点指示的深度位置(601)基本上等于相应参考深度阈值(201,202,203,204)时,选择性地丢弃相应数据点,和-基于所述选择性丢弃,向连接到通信链路(108)的lidar测量设备(101,102,103)的外部接口(1013)输出点云数据集(191,192,193,501,501*,502)。18.如权利要求17的处理电路,其中所述处理电路被配置为执行权利要求1至16中任一项的方法。19.一种方法,包括-在lidar测量设备(101,102,103)的处理电路(1011)处,接收点云数据集(191,192,193,501,501*,502)的多个数据点(51-73)),点云数据集(191,192,193,501,501*,502)的多个数据点(51-73)中的每个数据点指示相应的深度位置(601)和相应的反射强度,点云数据集(191,192,193,501,501*,502)的多个数据点(51-73)中的不同数据点(51-73)与lidar测量设备(101,102,103)的视野(602)中的不同横向位置相关联,每个横向位置与相应预定义参考深度阈值(201,202,203,204)或相应预定义参考反射强度中的至少一个相关联,-在lidar测量设备(101,102,103)的处理电路(1011)处,并且对于点云数据集(191,192,193,501,501*,502)的多个数据点(51-73)中的每个数据点:执行由相应数据点指示的深度位置(601)或反射强度中的至少一个与相应参考深度阈值(201,202,203,204)或相应参考反射强度中的至少一个的相应比较,并当该相应比较得出由相应数据点指示的深度位置(601)或反射强度中的至少一个基本上等于相应参考深度阈值(201,202,203,204)或相应参考反射强度中的至少一个时,选择性地丢弃相应数据点,以及-在lidar测量设备(101,102,103)的处理电路(1011)处,并且基于所述选择性丢弃,向连接到通信链接(108)的lidar测量设备(101,102,103)的外部接口(1013)输出点云数据集(191,192,193,501,501*,502)。
技术总结
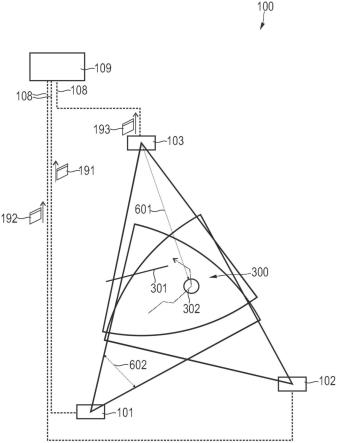
公开了一种多姿势固定姿势测量设置中的LIDAR测量设备(101、102、103)的处理电路。该电路接收点云数据集的多个数据点,多个数据点中的每个数据点指示相应的深度位置(601),多个数据点的不同数据点与LIDAR测量设备(101、102、103)的视野(602)中的不同横向位置相关联,每个横向位置与相应的预定义参考深度阈值相关联。对于多个数据点中的每个数据点,该电路执行由相应数据点指示的深度位置(601)与相应参考深度阈值的比较,并在相应比较时选择性地丢弃数据点,使得由相应数据点指示的深度位置(601)基本上等于相应参考深度阈值。通过所述选择性地丢弃,该电路将点云数据集输出到连接到通信链路(108)的LIDAR测量设备(101、102、103)的外部接口。可以将点云数据集(191、192、193)提供给服务器(109)。该电路通过从点云数据集中移除与相对于LIDAR扫描仪是静态的场景的背景相关联的数据点来促进点云数据集的大小减小。这有助于为后续应用减少计算资源。该电路还可以确定测量设备的故障。电路还可以确定测量设备的故障。电路还可以确定测量设备的故障。
技术研发人员:H
受保护的技术使用者:布里克菲尔德有限责任公司
技术研发日:2021.06.07
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。